Das könnte Ihnen auch gefallen
- Introduction To Physical Systems Modelling With Bond Graphs: Jan F. BroeninkDokument31 SeitenIntroduction To Physical Systems Modelling With Bond Graphs: Jan F. Broeninkusman_mani_7Noch keine Bewertungen
- Bond Graphs V2Dokument31 SeitenBond Graphs V2jorge_naranjo_4Noch keine Bewertungen
- Mech Elec AnalogiesDokument8 SeitenMech Elec AnalogiesUgbeni Oziegbe Vincentmaria KingNoch keine Bewertungen
- Methods of Writing Differential EquationDokument9 SeitenMethods of Writing Differential EquationDillah UtamaNoch keine Bewertungen
- Physics 2Dokument47 SeitenPhysics 2JURIS LHUINoch keine Bewertungen
- Using Vectors To Approximate The Neutral Current in A Three Phase Power SystemDokument8 SeitenUsing Vectors To Approximate The Neutral Current in A Three Phase Power Systemshrikanth5singhNoch keine Bewertungen
- Active Reactive Apparent PowerDokument6 SeitenActive Reactive Apparent PowerAtchut RaoNoch keine Bewertungen
- ElectricityDokument9 SeitenElectricityMunavi ZamanNoch keine Bewertungen
- Calculating Power FactorDokument6 SeitenCalculating Power FactorFahrul MuhamadNoch keine Bewertungen
- Assignment by Sampurnanand MishraDokument15 SeitenAssignment by Sampurnanand MishraSaroj SharmaNoch keine Bewertungen
- Power World SimulatorDokument8 SeitenPower World Simulatorgirish19Noch keine Bewertungen
- Summary of Topic Covered in ECE408Dokument89 SeitenSummary of Topic Covered in ECE408Nishikata ManipolNoch keine Bewertungen
- Millman's Theorem: Chapter 10 - DC Network AnalysisDokument17 SeitenMillman's Theorem: Chapter 10 - DC Network AnalysisAce Dela CruzNoch keine Bewertungen
- Power World SimulatorDokument10 SeitenPower World SimulatorJohny WillyNoch keine Bewertungen
- Alternating Current.1Dokument10 SeitenAlternating Current.1Jayati MittalNoch keine Bewertungen
- Ece KCLDokument7 SeitenEce KCLFunny Video Compilation NivNoch keine Bewertungen
- Fundamentals of Electrical Circuits AnalysisDokument8 SeitenFundamentals of Electrical Circuits AnalysisArcturus VoidNoch keine Bewertungen
- RCL Calc - Ohm's Law, KCL, KVL & SuperpositionDokument9 SeitenRCL Calc - Ohm's Law, KCL, KVL & SuperpositionBlueprint MihNoch keine Bewertungen
- Control 1 NotesDokument14 SeitenControl 1 NotesGatheru NjorogeNoch keine Bewertungen
- MIT mechanical engineering course covers linear graph modeling of one-port elementsDokument43 SeitenMIT mechanical engineering course covers linear graph modeling of one-port elementsMansoor SultanNoch keine Bewertungen
- Network Theorems: Up Previous Chapter 2: Circuit Principles Solving Circuits With KirchoffDokument10 SeitenNetwork Theorems: Up Previous Chapter 2: Circuit Principles Solving Circuits With KirchoffnikolakaNoch keine Bewertungen
- DC NETWORK ANALYSIS TECHNIQUESDokument30 SeitenDC NETWORK ANALYSIS TECHNIQUESKrishanu NaskarNoch keine Bewertungen
- Modeling of Electrical and Mechanical Systems: Lectures 12-15Dokument87 SeitenModeling of Electrical and Mechanical Systems: Lectures 12-15blzz2netNoch keine Bewertungen
- Lecture-2b-Modeling (1)Dokument40 SeitenLecture-2b-Modeling (1)Charles CalibreNoch keine Bewertungen
- (電動機械L6a補充教材) Maple Inc. - coupled InductorsDokument12 Seiten(電動機械L6a補充教材) Maple Inc. - coupled InductorsSharik KhanNoch keine Bewertungen
- Modelling Electrical SystemsDokument3 SeitenModelling Electrical SystemsPandu KNoch keine Bewertungen
- Modeling complex mechanical systems using electrical circuit analogsDokument9 SeitenModeling complex mechanical systems using electrical circuit analogsMehmet AKBABANoch keine Bewertungen
- Electronics for Chemical Instrumentation: Basic Circuit ComponentsDokument23 SeitenElectronics for Chemical Instrumentation: Basic Circuit ComponentsCourtney SimonseNoch keine Bewertungen
- Lecture-6-Basic System ModelsDokument23 SeitenLecture-6-Basic System Modelsseifu hailemariamNoch keine Bewertungen
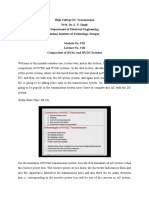
- HVDC Transmission ComparisonDokument26 SeitenHVDC Transmission ComparisonKandarp BhattNoch keine Bewertungen
- DC Component AnalysisDokument9 SeitenDC Component Analysisvivianzhu120Noch keine Bewertungen
- Help Hurricane Victims: Mesh Current MethodDokument12 SeitenHelp Hurricane Victims: Mesh Current Methodawa buayaNoch keine Bewertungen
- Lesson 02Dokument15 SeitenLesson 02Mohammad KhazaalNoch keine Bewertungen
- Ybus Matrix with Regulating TransformersDokument21 SeitenYbus Matrix with Regulating TransformersSankar MuthuswamyNoch keine Bewertungen
- Mathematical ModelsDokument69 SeitenMathematical Modelskyaw phone htetNoch keine Bewertungen
- Experiment#3 Power Factor Improvement ObjectivesDokument8 SeitenExperiment#3 Power Factor Improvement ObjectivesAmeer HamzaNoch keine Bewertungen
- Simplify Complex Circuits with Superposition TheoremDokument2 SeitenSimplify Complex Circuits with Superposition TheoremanupsorenNoch keine Bewertungen
- Capacitors Do Not Behave The Same As ResistorsDokument14 SeitenCapacitors Do Not Behave The Same As Resistorsmtheo20Noch keine Bewertungen
- Magnetic Fields and Electric CurrentDokument11 SeitenMagnetic Fields and Electric CurrentRaghav MehtaNoch keine Bewertungen
- Final DVSA2 Merged OrganizedDokument16 SeitenFinal DVSA2 Merged Organizedkakkunuru kashyapNoch keine Bewertungen
- SMSIS - Small Signal Stability of Single Machine Infinite Bus SystemDokument20 SeitenSMSIS - Small Signal Stability of Single Machine Infinite Bus SystemdeciohNoch keine Bewertungen
- Netwrok Analysis-Tips and Tricks For IIT JEEDokument25 SeitenNetwrok Analysis-Tips and Tricks For IIT JEEsanits591Noch keine Bewertungen
- Dynamic SystemDokument28 SeitenDynamic SystemA - STARNoch keine Bewertungen
- System AnalogiesDokument12 SeitenSystem AnalogiesfurzijatroNoch keine Bewertungen
- Conductance: Chapter 5 - Series and Parallel CircuitsDokument7 SeitenConductance: Chapter 5 - Series and Parallel CircuitskennypennyNoch keine Bewertungen
- 2 Ohm's Law: ExperimentDokument25 Seiten2 Ohm's Law: ExperimentAkshay PabbathiNoch keine Bewertungen
- MIT course examines modeling of dynamic systemsDokument43 SeitenMIT course examines modeling of dynamic systemstemkimleangNoch keine Bewertungen
- Synthesis of Mechanical Networks - The Inerter - 2002Dokument15 SeitenSynthesis of Mechanical Networks - The Inerter - 2002franco_2010Noch keine Bewertungen
- Norton PDFDokument23 SeitenNorton PDFlvsaruNoch keine Bewertungen
- Circuit Analysis ANALYSISDokument43 SeitenCircuit Analysis ANALYSISAJIN RIBIA PNoch keine Bewertungen
- Power Factor Part 1Dokument5 SeitenPower Factor Part 1Anonymous Cxriyx9HIXNoch keine Bewertungen
- EE6201 Circuit Theory Regulation 2013 Lecture Notes PDFDokument257 SeitenEE6201 Circuit Theory Regulation 2013 Lecture Notes PDFVenkatesan Swamy100% (1)
- Lecture FCSDokument8 SeitenLecture FCSApril BalceNoch keine Bewertungen
- Unit 1: Chemical Effects of Electric Current Faraday'S Laws of ElectrolysisDokument13 SeitenUnit 1: Chemical Effects of Electric Current Faraday'S Laws of ElectrolysisRajesh JagadeesanNoch keine Bewertungen
- Analogy Electric Mechanics FluidDokument6 SeitenAnalogy Electric Mechanics FluidMojdeh SharifiNoch keine Bewertungen
- Chapter 04Dokument54 SeitenChapter 04aaronnabilNoch keine Bewertungen
- Homework 5 SolutionsDokument10 SeitenHomework 5 SolutionsBryle CoNoch keine Bewertungen
- CalculusDokument76 SeitenCalculusBryle CoNoch keine Bewertungen
- Secret room plans sharedDokument1 SeiteSecret room plans sharedBryle CoNoch keine Bewertungen
- InfoDokument1 SeiteInfoBryle CoNoch keine Bewertungen
- DJKCHGSKJDVHKJDHVJKFSHVJHDFSZV HKJKHDCBH Kjdhs KJHJDH KJSHDKJDDokument1 SeiteDJKCHGSKJDVHKJDHVJKFSHVJHDFSZV HKJKHDCBH Kjdhs KJHJDH KJSHDKJDBryle CoNoch keine Bewertungen
- InfoDokument1 SeiteInfoBryle CoNoch keine Bewertungen
- Electronic Devices and Circuits 2 Mark Questions - Solved Unit 1Dokument60 SeitenElectronic Devices and Circuits 2 Mark Questions - Solved Unit 1priya88_recNoch keine Bewertungen
- Brosura - Relee Vamp - 2012 (En)Dokument16 SeitenBrosura - Relee Vamp - 2012 (En)Cata CatalinNoch keine Bewertungen
- 1SMB5.0AT3 Series 600 Watt Peak Power Zener Transient Voltage SuppressorsDokument8 Seiten1SMB5.0AT3 Series 600 Watt Peak Power Zener Transient Voltage SuppressorsedgardoNoch keine Bewertungen
- GaugesDokument100 SeitenGaugesvillanuevamarkdNoch keine Bewertungen
- ESPTrouble Shooting GuideDokument65 SeitenESPTrouble Shooting Guidesivakscribd67% (3)
- Inverter AC Technology: Application NotesDokument2 SeitenInverter AC Technology: Application NotesAkash GautamNoch keine Bewertungen
- Printed Circuit Board Layout For Switched-Mode Power SupplyDokument37 SeitenPrinted Circuit Board Layout For Switched-Mode Power SupplyThien DinhNoch keine Bewertungen
- C57 16-1996 PDFDokument95 SeitenC57 16-1996 PDFEdwin Capdepomt100% (1)
- 270291-DX26 (Digital Loudspeaker Processor)Dokument4 Seiten270291-DX26 (Digital Loudspeaker Processor)Olger Quintero TapiaNoch keine Bewertungen
- Biccotest Model T535 Cable Fault LocatorDokument62 SeitenBiccotest Model T535 Cable Fault Locatorjandresortiz2675% (4)
- 1.0 Title:: Experiment No.6Dokument9 Seiten1.0 Title:: Experiment No.6srisairampoly100% (1)
- Modeling and Simulating A Battery For An Electric Vehicle Based On ModelicaDokument9 SeitenModeling and Simulating A Battery For An Electric Vehicle Based On ModelicasheberuaNoch keine Bewertungen
- Datasheet For Tan Delta and Capacitance Tester TDC3100 BDokument2 SeitenDatasheet For Tan Delta and Capacitance Tester TDC3100 BCarlos SantosNoch keine Bewertungen
- DatasheetDokument4 SeitenDatasheetLima LogictelNoch keine Bewertungen
- Types of Neutral Earthing in Power Distribution - Electrical NotesDokument15 SeitenTypes of Neutral Earthing in Power Distribution - Electrical Notessudipta_kolNoch keine Bewertungen
- Max 2620Dokument12 SeitenMax 2620Dinesh VernekarNoch keine Bewertungen
- Leakage Current Formula PDFDokument2 SeitenLeakage Current Formula PDFtahirkhaliqueNoch keine Bewertungen
- The Advantages and Operation of Flying-Capacitor BoostersDokument14 SeitenThe Advantages and Operation of Flying-Capacitor BoostersYann ElhamNoch keine Bewertungen
- Building a reliable capacitive sensor interface with AD7142 capacitive-to-digital converterDokument2 SeitenBuilding a reliable capacitive sensor interface with AD7142 capacitive-to-digital converterShri KulkarniNoch keine Bewertungen
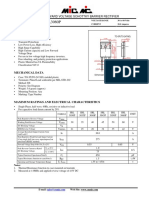
- SRL3060P PDFDokument2 SeitenSRL3060P PDFantagonicoNoch keine Bewertungen
- Heater cooler-Sorin-3T-Service ManualDokument100 SeitenHeater cooler-Sorin-3T-Service ManualTareq88% (16)
- 0 - 44 DB RF AttenuatorDokument2 Seiten0 - 44 DB RF AttenuatorOndrej LomjanskiNoch keine Bewertungen
- Wireless Energy (The Future of ELECTRICITY)Dokument13 SeitenWireless Energy (The Future of ELECTRICITY)R A V I100% (1)
- PLC NotesDokument170 SeitenPLC NotesBikasita Talukdar100% (2)
- Traction HarmonicsDokument14 SeitenTraction HarmonicsAnonymous NGXdt2BxNoch keine Bewertungen
- Raghunathan GBDokument3 SeitenRaghunathan GBRagunathan NarayananNoch keine Bewertungen
- Capacitor Installation ChecklistDokument1 SeiteCapacitor Installation Checklistbobby CanaresNoch keine Bewertungen
- High Power Factor Electronic Transformer for Gaseous Discharge TubesDokument12 SeitenHigh Power Factor Electronic Transformer for Gaseous Discharge TubesVasily VorobyovNoch keine Bewertungen
- Vibrator Power SuppliesDokument6 SeitenVibrator Power Suppliesebl21Noch keine Bewertungen
- UNIT 2 MechatronicsDokument35 SeitenUNIT 2 MechatronicsMuthuvel M91% (11)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormVon EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormBewertung: 5 von 5 Sternen5/5 (5)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsVon EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Mental Math Secrets - How To Be a Human CalculatorVon EverandMental Math Secrets - How To Be a Human CalculatorBewertung: 5 von 5 Sternen5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingVon EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Von EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Bewertung: 5 von 5 Sternen5/5 (1)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenVon EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNoch keine Bewertungen
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceVon EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNoch keine Bewertungen
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeVon EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeBewertung: 4 von 5 Sternen4/5 (2)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusVon EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusBewertung: 4.5 von 5 Sternen4.5/5 (2)
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Math Magic: How To Master Everyday Math ProblemsVon EverandMath Magic: How To Master Everyday Math ProblemsBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Psychology Behind Mathematics - The Comprehensive GuideVon EverandPsychology Behind Mathematics - The Comprehensive GuideNoch keine Bewertungen
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Von EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Noch keine Bewertungen
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormVon EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormBewertung: 4.5 von 5 Sternen4.5/5 (20)
- Limitless Mind: Learn, Lead, and Live Without BarriersVon EverandLimitless Mind: Learn, Lead, and Live Without BarriersBewertung: 4 von 5 Sternen4/5 (6)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsVon EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsBewertung: 3.5 von 5 Sternen3.5/5 (9)