Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Delcam - PowerSHAPE 2010 Training Course en - 2009Dokument364 SeitenDelcam - PowerSHAPE 2010 Training Course en - 2009harun88% (25)
- Mechanistic Design of Overlay Based On Benkelman Beam Deflection TechniqueDokument8 SeitenMechanistic Design of Overlay Based On Benkelman Beam Deflection TechniqueNilay BhavsarNoch keine Bewertungen
- Mathematics Form Two Yearly Lesson PlanDokument10 SeitenMathematics Form Two Yearly Lesson PlanAbdul Rahman Narawi67% (3)
- GEMS UnfoldUnwrinkle PDFDokument10 SeitenGEMS UnfoldUnwrinkle PDFBranimir DelevicNoch keine Bewertungen
- Experimental Study On Flexible Concrete by Using Polyurethane FiberDokument4 SeitenExperimental Study On Flexible Concrete by Using Polyurethane FiberEditor IJTSRDNoch keine Bewertungen
- LVR Design GuidelinesDokument15 SeitenLVR Design GuidelinesAudie PinedaNoch keine Bewertungen
- Benklemen BeamDokument6 SeitenBenklemen BeamEdsony NyamwelaNoch keine Bewertungen
- Flexible Concrete FinalDokument19 SeitenFlexible Concrete FinalSuman VarmaNoch keine Bewertungen
- Strength Characteristics of Quarry Dust in Replacement of SandDokument8 SeitenStrength Characteristics of Quarry Dust in Replacement of SandSuman VarmaNoch keine Bewertungen
- Determinate AnalysisDokument10 SeitenDeterminate AnalysisViviana Escala CastilloNoch keine Bewertungen
- A1607020106 PDFDokument6 SeitenA1607020106 PDFSuman VarmaNoch keine Bewertungen
- Effect of Quarry Dust As Partial Replacement of Sand in ConcreteDokument9 SeitenEffect of Quarry Dust As Partial Replacement of Sand in ConcreteSuman VarmaNoch keine Bewertungen
- Behavior of Concrete With Quarry Dust As Partial Replacement of Fine AggregateDokument8 SeitenBehavior of Concrete With Quarry Dust As Partial Replacement of Fine AggregateSuman VarmaNoch keine Bewertungen
- Ijsrp p4372 PDFDokument4 SeitenIjsrp p4372 PDFSuman VarmaNoch keine Bewertungen
- TSIIC Building Application Check ListDokument1 SeiteTSIIC Building Application Check ListSrikanth YadagiriNoch keine Bewertungen
- Experimental Study On Bendable Concrete IJERTV5IS100400Dokument4 SeitenExperimental Study On Bendable Concrete IJERTV5IS100400surya pradeepNoch keine Bewertungen
- Partial Replacement of Sand With Quarry Dust in ConcreteDokument5 SeitenPartial Replacement of Sand With Quarry Dust in ConcreteSuman VarmaNoch keine Bewertungen
- The Utilization of Quarry Dust As Fine Aggregates in ConcreteDokument6 SeitenThe Utilization of Quarry Dust As Fine Aggregates in ConcreteSuman VarmaNoch keine Bewertungen
- B TechDokument37 SeitenB TechSuman VarmaNoch keine Bewertungen
- Itd ManualDokument30 SeitenItd ManualSuman VarmaNoch keine Bewertungen
- Design of Flexible PavementDokument2 SeitenDesign of Flexible PavementbharatNoch keine Bewertungen
- GeotextilesDokument22 SeitenGeotextilesSuman VarmaNoch keine Bewertungen
- Bendable ConcreteDokument7 SeitenBendable ConcreteNelly PadriqueNoch keine Bewertungen
- A Review of Soil Stabilization Using Low Cost MethodsDokument4 SeitenA Review of Soil Stabilization Using Low Cost MethodsVicky Viĺlanueva-UmaliNoch keine Bewertungen
- Soil StabilizationDokument7 SeitenSoil StabilizationSuman VarmaNoch keine Bewertungen
- Wave EquationDokument4 SeitenWave EquationSuman VarmaNoch keine Bewertungen
- Rigid PavementsDokument84 SeitenRigid PavementsVizag Roads89% (9)
- ControlsDokument253 SeitenControlsOpata OpataNoch keine Bewertungen
- Flexible Concrete FinalDokument19 SeitenFlexible Concrete FinalSuman VarmaNoch keine Bewertungen
- 10.soilstabilization 2Dokument6 Seiten10.soilstabilization 2Suman VarmaNoch keine Bewertungen
- Physics Mechanics - Lecture NotesDokument141 SeitenPhysics Mechanics - Lecture NotesMichaelNoch keine Bewertungen
- Mc-Eee313 L2Dokument19 SeitenMc-Eee313 L2NASIM eeeNoch keine Bewertungen
- Dhruba Paul: HrubaDokument26 SeitenDhruba Paul: HrubaDhruba PaulNoch keine Bewertungen
- Fall Detecttion With Accelerometer ADXL345 From Analog Devices.Dokument7 SeitenFall Detecttion With Accelerometer ADXL345 From Analog Devices.spas20140% (1)
- V5 Robotics Training GuideDokument306 SeitenV5 Robotics Training Guidejc_fleury92% (12)
- XII-PTS-27 (2023-24) - by O.P. GUPTADokument7 SeitenXII-PTS-27 (2023-24) - by O.P. GUPTAronitsuniyaNoch keine Bewertungen
- OrientationDokument39 SeitenOrientationKumar ChowdaryNoch keine Bewertungen
- Example 1 - Plane Areas in Rectangular Coordinates - Integral Calculus ReviewDokument6 SeitenExample 1 - Plane Areas in Rectangular Coordinates - Integral Calculus ReviewRomeo VictorNoch keine Bewertungen
- PLANE182 Element Description: 2-D 4-Node Structural SolidDokument9 SeitenPLANE182 Element Description: 2-D 4-Node Structural SolidajmalNoch keine Bewertungen
- Cad-Cam-Cim Lab Manual Me804Dokument47 SeitenCad-Cam-Cim Lab Manual Me804siddharth100% (1)
- Lesson 5 Datums, Layers, and Sections: ObjectivesDokument44 SeitenLesson 5 Datums, Layers, and Sections: ObjectivesAnonymous rhbWnvNoch keine Bewertungen
- Answer All Questions in This Section.: Sec 1 Lim SinDokument4 SeitenAnswer All Questions in This Section.: Sec 1 Lim SinJanelleJiaWenNoch keine Bewertungen
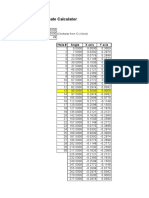
- Bolt Circle CalculatorDokument3 SeitenBolt Circle Calculatornandu523Noch keine Bewertungen
- Protasteel 2022 Basic Training GuideDokument94 SeitenProtasteel 2022 Basic Training GuideMustafa KutanisNoch keine Bewertungen
- FunctionDokument178 SeitenFunctionredoctober24Noch keine Bewertungen
- EMW Seminar Math SPM 2013 K2Dokument29 SeitenEMW Seminar Math SPM 2013 K2Azeem Daud AONoch keine Bewertungen
- Electrostates DPP 3 Advance PDFDokument46 SeitenElectrostates DPP 3 Advance PDFMridul GuptaNoch keine Bewertungen
- Sketchup Basics: Line, Rectangle, Push/PullDokument20 SeitenSketchup Basics: Line, Rectangle, Push/Pulllgfldfxhz9Noch keine Bewertungen
- Projection of PointsDokument6 SeitenProjection of Pointsanjaiah_19945Noch keine Bewertungen
- Kinematics Analysis of 5250 Lab-Volt 5-Dof Robot Arm: Dr. Wathik Isaa Mahdi Al-TameemiDokument9 SeitenKinematics Analysis of 5250 Lab-Volt 5-Dof Robot Arm: Dr. Wathik Isaa Mahdi Al-TameemiEfren Alamillo MataNoch keine Bewertungen
- 9 4 Rotation and Systems of Quadratic EquationsDokument15 Seiten9 4 Rotation and Systems of Quadratic Equationsapi-317140261Noch keine Bewertungen
- Basic Maths Module PDFDokument37 SeitenBasic Maths Module PDFiitlectureNoch keine Bewertungen
- Chapter 3.CNC Part ProgrammingDokument61 SeitenChapter 3.CNC Part ProgrammingDr. Vivek SrivastavaNoch keine Bewertungen
- Tarot Mandalas PDFDokument5 SeitenTarot Mandalas PDFNad SNoch keine Bewertungen
- Automatic Mini CNC Plotter MachineDokument3 SeitenAutomatic Mini CNC Plotter MachineVinayaga ProjectinstituteNoch keine Bewertungen
- Excel Timeline TemplateDokument4 SeitenExcel Timeline TemplatesusithaqsNoch keine Bewertungen
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Dokument10 SeitenA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7Noch keine Bewertungen