Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
AUTOMATED FLIGHT
Cheyenne I & IA - Bendix-King KFC250 Autopilot & Flight Director
10
2 3 4 8
1 11
9
5 6 7
12
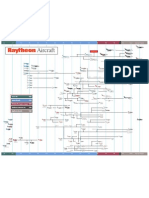
KC290 Mode Controller:
1: FD/AP Vertical Trim (Pitch Attitude/Altitude) 2: Heading mode (HDG)
3: Flight Director (FD) 4: Altitude hold mode (ALT)
5: NAV mode (NAV) (VOR/GPS) 6: Reverse Locator (Backcourse) mode (BC)
7: Approach mode (APPR) (ILS/VOR) 8: Autopilot (AP)
9: Autopilot Test Button 10: Go-Around mode Clickspot
KC291 Yaw Mode Controller:
11: Yaw Damper Engage/Disengage 12: Annunciator Light
The KFC250 Flight Director/Autopilot is a complete 3-axis integrated system with
large, 4-inch electric (or 3-inch vacuum/electric) Flight Command and Horizontal
Situation Indicators. An all solid-state Flight Computer provides computed Flight
Director commands along with complete 3-axis Autopilot control. The system pro-
vides all standard operating modes plus altitude preselect capability. This chapter
describes the different autopilot modes of operation.
Revision: 17.07.2006 For flight simulation use only
Page 96
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
Basic Attitude Reference Mode
Activated with „power on” (AP) but with no modes selected. The Flight Com-
mand indicator (Flight director bars in the ADI) and horizontal situation indicator
(HSI) will display existing attitude and heading. The Command V-bar is retracted
out of view until a Flight Director/Autopilot mode has been selected.
Flight Director (FD)
Command V-bar will call for wings level. The pitch attitude of the aircraft will
remain the same as at the time of mode selection.
Heading (HDG)
Select desired heading on HSI, then select the HDG mode and the system will
command the necessary bank to turn to and maintain the selected heading.
NAV (VOR/GPS)
Set desired course on HSI and select NAV mode. The system’s all-angle NAV Course
Capture feature gives the pilot complete freedom to select any intercept angle
in response to ATC vectors, using HDG mode. The NAV mode will be „armed,”
and at the capture point HDG will automatically disconnect and the system will
„couple” and command the necessary bank to capture and track a selected VOR
or GPS course without overshooting (Note: Overshoot protection is not possible
in Microsoft Flight Simulator).
Approach (APPR) (ILS or VOR)
Set the inbound front approach course on the HSI and select Approach mode.
The system’s all-angle Approach Course Capture feature allows the pilot to select
any intercept angle in response to ATC vectors, as in the NAV mode. The Ap-
proach mode will be „armed”, and at the appropriate capture point the system
will „couple” and command the necessary bank to capture and track LOC and
Glideslope beams for precision approaches, or bank command to capture and
track VOR courses for nonprecision approaches.
Back Course (BC)
With back course selected in approach mode, the system when capturing will
command the bank necessary to capture and track a reverse LOC course. Glideslo-
pe is locked out. The inbound front approach course is always set on the HSI to
For flight simulation use only Revision:17.07.2006
Page 97
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
enable you to make course corrections toward the needle rather than away from
the needle on the HSI.
Go Around (GA)
Push the „Go Around” button (hidden clickspot on the autopilot panel: click the
screw in the upper left corner) and the system will command wings level and
nose up to a preset missed approach climb attitude.
Altitude Hold (ALT)
Pitch command to maintain engaged altitude.
Vertical Trim
Provides capability to adjust or slew the Altitude up or down without disenga-
ging and then reengaging ALT Hold. If Altitude Hold is not engaged, the Vertical
Trim knob will adjust the pitch attitude up or down.
Altitude Preselect (via KAS 297 Altitude Preselector)
Permits preselection of a desired altitude and automatic capture upon reaching
that altitude.
Autopilot (AP)
Control surfaces respond to all selected Flight Director mode commands in both
pitch and roll axis plus automatic pitch trim. A full time yaw damper is in opera-
tion any time the Autopilot is engaged.
Yaw Damp Engage
System senses motion around the yaw axis and automatically moves the rudder
to oppose yaw.
PITCH ATTITUDE SELECTOR KNOB OPERATION
Depending on the selected autopilot mode, clicking the UP/DN positions of the
PITCH ATTITUDE SELECTOR KNOB produces the following results:
Pitch mode: +/- 0.5° pitch per click
No mode: Trim adjust +/- 1 per click. Equals pressing the 1 or 7 keys on
the numeric keypad.
Revision: 17.07.2006 For flight simulation use only
Page 98
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
2 3 4 5
KAP285 ANNUNCIATOR PANEL
1: Autopilot Mode Annunciators 2: Inner Marker („Airway“) Annunciator
3: Outer Marker Annunciator 4: Middle Marker Annunciator
5: Trim Fault Warning Annunciator
The KAP285 Annunciator Panel provides the pilot with continuous information
on system operating status. It shows modes in operation, as well as modes „ar-
med” prior to capture. It also displays Marker Beacon lights and a trim system
warning flag. Clicking on the annunicator opens a zoomed autopilot window.
KFC250 Autopilot Operation Modes
There are twelve (12) modes of operation that are provided by the KFC 250 sy-
stem to offer the pilot Flight Director/Autopilot commands in response to his
selection of desired modes on the Mode Controller.
Most of these modes are activated by pushbutton switches on the Mode Control-
ler. These pushbuttons operate with alternate action. The first depression of the
pushbutton activates a mode; the second depression cancels it, if it has not alrea-
dy been automatically inactivated. Annunciation of the mode selected appears
on the annunciator panel.
Any operating mode not compatible with a newly selected mode will be automa-
tically cancelled in favor of the pilot’s latest selection. This lets the pilot advance
along his flight sequence without the inconvenience of having to manually can-
For flight simulation use only Revision:17.07.2006
Page 99
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
cel modes. For example, if in NAV CPLD mode, selection of Heading will automa-
tically cancel NAV.
THE BASIC MODE OF SYSTEM OPERATION
The system will be in the Basic Attitude Reference or „Gyro” mode with engi-
nes running and aircraft „power on,” but no modes selected (Annunciator Panel
blank). This provides indication of aircraft heading on the Horizontal Situation
Indicator, and roll and pitch attitude on the Flight Command indicator. The FCI
Command V-bar is biased out of view.
FLIGHT DIRECTOR Mode (FD)
The Flight Director mode is activated by depressing the „FD” button on the Mode
Controller. The FCI Command V-bar will appear and provide the pilot with stee-
ring commands to maintain wings level and the pitch attitude that existed at the
time of Flight Director engagement.
If pitch or roll attitude are changed, recycling the FD button will synchronize the
Command V-bar to the new situation.
If a change only in the commanded pitch attitude is desired, the Control Wheel
Steering (CWS) button installed on the pilot’s control wheel allows the pilot to
synchronize the Command V-bar (in the FD mode with Autopilot disengaged)
without removing his hand from the control wheel.
The Flight Director can also be activated by direct selection of any specific mode,
which will activate the Command V-bar. Such selection will will cause the annun-
ciation of both the FD and the appropriate mode.
The Vertical Trim switch on the Mode Controller may also be used to adjust the
selected pitch attitude up or down at approx. 1 degree/second.
Special note: The FD mode must be activated before the Autopilot can be enga-
ged.
AUTOPILOT Engagement
The AUTOPILOT is engaged by moving the AP toggle switch on the Mode Con-
troller to the ON position. Note that the AP and the YAW DAMP (YD) switches
are wired so that the YAW DAMP mode is automatically engaged with the AP
switch. The Autopilot, together with the Yaw Damper, provides three-axis sta-
bilization, automatic turn coordination and automatic elevator trim as well as
automatic response to all selected Flight Director commands.
Revision: 17.07.2006 For flight simulation use only
Page 100
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
CAUTION: When the autopilot is engaged, manual application of a force to the
pitch axis of the control wheel for a period of 3 seconds or more will result in the
autotrim system operating in the direction to create a force opposing the pilot.
This opposing mistrim force will continue to increase as long as the pilot applies a
force to the control wheel and will ultimately overpower the autopilot. If the au-
topilot is disengaged under these conditions, the pilot maybe required to exert
control forces in excess of 50 pounds to maintain the desired aircraft attitude
The pilot will have to maintain this control force while he manually retrims the
aircraft.
CAUTION: Prior to Autopilot engagement, the pilot should make sure the V-bar
commands are satisfied. This will prevent any rapid changes in the aircraft’s flight
path when the Autopilot is engaged.
HEADING SELECT/PRESELECT Mode (HDG SEL)
Select a desired heading by positioning the heading „bug” on the HSI. This is
done with the HDG knob on the HSI. Depress the HDG button on the Mode Con-
troller to activate the HDG SEL mode. „HDG SEL” will light on the Annunciator
Panel and a computed, visually displayed bank command is shown on the FCI.
Following this bank command, the aircraft will bank and roll out on the desired
preselected heading.
The Command V-bar on the FCI will deflect in the direction of the shortest turn
to satisfy the commanded turn to the preselected heading. The aircraft may be
manually banked to realign the V-bar and satisfy the command or, if the Autopi-
lot is engaged, the aircraft will automatically bank, turn to, roll out and hold the
preselected heading. As the aircraft approaches the selected heading the V-bar
will command a rollout to wings level.
With the HDG SEL mode in operation, subsequent changes made in the heading
„bug” position on the HSI will immediately cause the V-bar on the FCI to call for
a turn to the new heading. The HDG SEL mode is cancelled when NAV or APPR
coupling occurs, or whenever the FD or HDG mode buttons are depressed.
CAUTION: An invalid heading source (compass flag in view) will automatically
disengage the autopilot. The autopilot may then be re-engaged, however, only
the vertical modes will be useable.
For flight simulation use only Revision:17.07.2006
Page 101
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
YAW DAMP Mode
The KC291 Yaw Mode Controller is installed beside the KC290 Mode Controller
and the yaw axis is wired so that it automatically engages when the Autopilot is
engaged. Disengagement of the Yaw Damper is accomplished by using the alter-
nate action switch (pushbutton) on the KC291. The Yaw Damper may be engaged
alone with or without any Flight Director mode. It usually provides a more stable
aircraft whether control surfaces are operated manually or by the Autopilot. The
Yaw Damper engage status is annunciated on the KC291 Yaw Mode Controller.
NAVIGATION (NAV ARM and NAV CPLD) Mode
The NAV mode provides visual bank commands on the Flight Command Indicator
and deviation guidance on the HSI to intercept and track a VOR course or an GPS
course.
Operation of the NAV mode requires the pilot to:
1. Tune the frequency of the selected VOR (or VORTAC) station.
2. Set the HSI course pointer on the desired course.
3. Establish angle of intercept by setting the heading „bug” and activate
„HDG” mode.
4. Depress the NAV button on the Mode Controller
When the „NAV” button on the Mode Controller is depressed, „NAV ARM” will
be lighted on the Annunciator Panel and the automatic capture circuit is armed.
Heading select, if operating, is retained until capture occurs.
The VOR „course-capture’’ point is variable to prevent overshoot and depends on
angle of intercept and the rate the course deviation is changing. Upon capture, a
bank command will be displayed on the FCI; the HDG, if on, will be cancelled and
„NAV CPLD” will be lighted on the Annunciator Panel.
The pilot can manually bank the aircraft to satisfy the command display which
will call for a rollout to level flight when on course centerline to track the course.
Crosswind compensation is provided in the „track“ state.
If the NAV mode is selected with the aircraft level within ±4° of bank and within
three dots of course deviation, NAV ARM will be bypassed and NAV CPLD will
engage directly.
Revision: 17.07.2006 For flight simulation use only
Page 102
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
If the Autopilot is engaged, the aircraft will bank to satisfy the command display
and rollout on course automatically.
Upon station (or waypoint) passage, an outbound course other than the inbound
reciprocal can be selected by resetting the NAV course arrow on the HSI. This
will cause an immediate V-bar deflection on the FCI directing a turn to the new
course.
The NAV mode is cancelled by depressing the NAV button, or selecting HDG (when
in NAV coupled) or APPR modes, or pushing FD to „OFF“.
CAUTION: The NAV mode of operation will continue to provide airplane control
without a valid VOR/LOC signal (NAV flag in view).
SPECIAL NOTE: When an ILS frequency in range is tuned into the NAV1 radio, a
possible selected VOR GPS mode is cancelled, and the autopilot reverts to NAV
mode (i.e. the autopilot follows the localizer signal only!).
APPROACH (APPR ARM, APPR CPLD and GS CPLD) Mode
The APPR mode provides visual roll and pitch commands on the FCI V-bar to cap-
ture and track precision ILS (LOC and Glideslope) beams, or non-precision VOR
radials. Lateral and vertical deviation can be monitored on the HSI.
Operation of the APPR mode requires the pilot to
1. Set the NAV receiver frequency
2. Set the HSI course pointer to the inbound runway heading or the front course
in case of ILS precision approach. Do this even on back course approach
3. Set the HDG SEL”bug” on the HSI to the desired intercept angle and activate
HDG” mode
4. Depress the „APPR” button on the mode controller
The automatic APPR capture function will be immediately armed „APPR ARM”
will be lighted on the Mode Annunciator Panel.
In APPR ARM mode, prior to capture, the heading select mode is retained in order
to allow the pilot to adjust heading to Approach Control vectoring instructions.
The LOC beam or VOR „capture” point will vary, depending on angle of inter-
cept and rate of change of deviation indication. Upon capture, a bank command
will be introduced on the FCI, the existing heading mode will be cancelled and
„APPR/CPLD” will be lighted on the Annunciator Panel.
For flight simulation use only Revision:17.07.2006
Page 103
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
The pilot may manually bank the aircraft to satisfy the command display, which
will command a rollout to level flight when the aircraft is on course. Automa-
tic crosswind compensation will provide precise tracking. VOR/LOC deviation is
shown on the HSI, and actual crab angle will be shown by offset of the course
arrow from the lubber line.
Throughout APPR mode operation, LOC and Glideslope deviation or VOR devia-
tion are displayed in the HSI. If the Autopilot is engaged during operation in the
APPR mode, automatic steering response will follow the command display on the
FCI.
The Glideslope mode is armed for automatic capture if LOC front course capture
has occurred. Automatic Glideslope capture occurs as the aircraft passes through
the glide path from above or below.
Upon interception of the Glideslope, capture occurs and „GS CPLD” is lighted
on the Annunciator Panel. A smooth capture pitch command is displayed by the
Command V-bar. The pilot (or Autopilot) controls the aircraft to satisfy the Com-
mand V-bar.
Upon GS capture, the ALT HOLD mode (if active) is cancelled. However, ALT HOLD
may be manually reselected to maintain altitude upon reaching MDA if visual
contact is not established.
During VOR or RNAV approaches, Glideslope capture will not occur because the
NAV receiver is channeled to a VOR station, not an ILS, and this locks out the Gli-
deslope function.
APPR CPLD mode is cancelled by selection of HDG, NAV, or Go-Around modes, or
pushing FD or APPR to „Off”.
CAUTION: The APPR mode of operation will continue to provide airplane control
without a valid VOR/LOC signal (NAV flag in view).
NOTE: Overshoot protection is not possible in Microsoft Flight Simulator)
BACK COURSE (BACK CRS) Mode
Whenever a LOC or ILS frequency is selected, the BC mode may be activated by
depressing the BC button on the Mode Controller, after selecting APPR. When in
BC mode and Localizer capture occurs. the system will turn and track outbound
on the front course or inbound on the back course. The BC mode reverses the LOC
deviation signal and course datum to permit the FCI steering command display
to operate on a fly-to rather than a fly-from basis on the reverse course. „BACK
CRS” is lighted on the Annunciator Panel.
Revision: 17.07.2006 For flight simulation use only
Page 104
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
Operation on BC is identical to front course operation including setting the HSI
Course Pointer to the front course heading, except that automatic Glideslope
capture is „locked out” by the switching circuitry. Localizer deviation on HSI will
have the proper sensing if the front inbound Localizer course was set on the
HSI.
SPECIAL NOTE: Back course mode is only available after selecting APPR mode.
GO-AROUND Mode
The Go-Around mode is primarily designed to assist the pilot in establishing the
proper pitch attitude under missed approach conditions. The Go-Around switch
is located on the autopilot panel in the upper left corner in form of a hidden click
spot.
Activating the Go-Around mode during an approach cancels all Flight Director
modes and disengages the Autopilot, if it is engaged. A wings-level and pitch-up
command is displayed by the FCI and „GO AROUND” is lighted on the Annuncia-
tor Panel. The magnitude of the pitch-up command is adjustable to match Flight
Manual criteria for each aircraft model.
The Go-Around mode may also be used on takeoff for climb-out attitude guidance.
When used for takeoff, the Go-Around mode may be followed with HDG for con-
tinuous heading control during departure. NAV and APPR modes may also be
armed for automatic capture and guidance during the departure sequence.
Go-Around may be cancelled by use of Vertical Trim, Altitude Hold mode, Control
Wheel Steering mode or by turning off the Flight Director.
ALTITUDE SELECT (ALT ARM) Mode
This mode allows the pilot to select an altitude and, upon approaching that selec-
ted altitude, obtain an automatic visual pitch command on the FCI to capture and
hold the preselected altitude. To operate in this mode the pilot must:
1. Set the desired altitude into the „selected altitude” window of the KAS 297
Altitude Selector.
2. Establish a climb or descent as appropriate.
3. Depress the ARM button on the Altitude Selector. This may be done at any
time during the climb or descent before the selected altitude has been at-
tained. „ALT ARM” will light on the Annunciator Panel and on the Altitude
Selector.
For flight simulation use only Revision:17.07.2006
Page 105
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
4. The Altitude „ALERT” annunciator in the KAS 297 will illuminate and a two
second aural tone will sound 1,000 ft. prior to reaching selected altitude and
will cancel at 300 ft. prior. An aural tone will sound upon reaching altitude.
As the aircraft approaches the selected altitude, an „adaptive” pitch rate com-
mand will automatically guide the pilot through it at a low rate. As the aircraft
reaches the selected altitude, ALT HOLD will automatically engage, „ALT HOLD”
will light on the Annunciator Panel and „ALT ARM” will disappear. The command
bars on the FCI will call for level flight at the selected altitude. If autopilot is en-
gaged, the system will perform the required maneuvers.
ALT ARM is disengaged by depressing the ALT ARM button, by engaging ALT
HOLD, by GS capture, or selecting FLT DIR to OFF.
ALTITUDE HOLD (ALT HOLD) Mode
This mode will cause a computed visual pitch command on the FCI command bars
to hold the aircraft at the pressure altitude existing at the time it was activated.
The mode is activated either automatically by the ALT ARM function, or manually
by depressing the ALT button on the Mode Controller. If the autopilot is enga-
ged, it will automatically hold the aircraft at that altitude.
The Vertical Trim switch may be used to adjust the selected altitude up or down
at a constant rate of approximately 600 fpm without disengaging the mode. This
enables the pilot to conveniently adjust the aircraft altitude to match resetting
of the altimeter, or to make short descent segments during a nonprecision ap-
proach.
The ALT HOLD mode is cancelled by automatic Glideslope capture or selection of
ALT ARM, or GO-AROUND modes, or selection of FLT DIR to OFF.
Revision: 17.07.2006 For flight simulation use only
Page 106
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
Automated flight
Cheyenne II & IIXL - Bendix-King KFC300 Autopilot & Flight Director
8
2 5 8
11
1
3 6 11 9 10
4 7
11 11
KMC340 Mode Controller:
1: FD/AP Vertical Trim (Pitch Attitude/Altitude) and Heading Select Knob
2: Heading select (HDG) 3: Approach (APPR) (ILS/VOR)
4: Navigate (NAV) (VOR/GPS) 5: Altitude hold (ALT)
6: Speed profile (SPD PRF) 7: IAS hold (IAS)
8: Go-around mode click spot 9: Flight Director (FD)
10: Autopilot master switch (AP) 10: Yaw Damper Engage/Disengage
11: Autopilot failure warning lights
The KFC300 Flight Director/Autopilot is a complete 3-axis integrated system with
large, 4-inch electric (or 3-inch vacuum/electric) Flight Command and Horizontal
Situation Indicators. An all solid-state Flight Computer provides computed Flight
Director commands along with complete 3-axis Autopilot control. The system
provides all standard operating modes plus altitude preselect capability. In addi-
tion to the KFC250´s modes, the KFC300 also provides two modes to hold a cer-
tain airspeed via pitch correction.
This chapter describes only the differences to the KFC250 Autopilot & Flight Di-
rector, mentioned previously. For complete Autopilot reference, refer to Chapter
AUTOMATED FLIGHT (page 96).
For flight simulation use only Revision:17.07.2006
Page 107
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
KAP315 ANNUNCIATOR PANEL
1: Autopilot Mode Annunciators
The KAP315 Annunciator Panel provides the pilot with continuous information
on system operating status. It shows modes in operation, as well as modes „ar-
med” prior to capture. Clicking on the annunciator panel opens a zoomed auto-
pilot window.
Additional KFC300 Autopilot Operation Modes
IAS Hold mode (IAS)
The IAS HOLD mode is selected by depressing the IAS button (7) on the KMC 340
Mode Controller. „IAS HOLD“ will be lighted on the KAP 315 Mode Annunciator
Panel and the pitch command bars will be activated on the FCI to call pitch ma-
neuvers necessary to maintain a constant indicated airspeed. The reference air-
speed will be the indicated airspeed at the time of IAS HOLD engagement, and is
independent of power setting.
If the autopilot is engaged, airspeed will be automatically maintained, while ver-
tical speed is adjusted, and loss or gain of altitude will depend on power set-
ting.
The reference airspeed may be adjusted at a rate of two knots per second by use
of the Vertical Trim Knob on the KMC 340 Mode Controller.
Revision: 17.07.2006 For flight simulation use only
Page 108
Aircraft Operation Manual
Piper Cheyenne I, IA, II, IIXL
The IAS HOLD mode is cancelled by selection of GO-AROUND, ALT HOLD, SPD
PRF, Glideslope capture or FLT DIR off.
SPEED PROFILE (SPD PRF) mode
The speed profile mode is used primarily in climb or descend. The pilot engages
SPEED PROFILE at the speed appropriate to his altitude at the time of engage-
ment. Or he adjusts to the appropriate speed for his altitude with the vertical
trim switch after engagement. The reference airspeed may be adjusted at a rate
of two knots per second by use of the Vertical Trim switch on the Mode Control-
ler.
Engagement will cause „SPD PRF” to be lighted on the Annunciator Panel and
activate the command bars on the FCI to call for pitch maneuvers necessary to
maintain the airspeed appropriate for the current altitude. If the autopilot is en-
gaged, the airspeed will be automatically adjusted by 1.3 KIAS per 1000 feet in
climb or descent.
PITCH ATTITUDE SELECTOR KNOB OPERATION
Depending on the selected autopilot mode, clicking the UP/DN position of the
PITCH ATTITUDE SELECTOR KNOB (1) produces the following results:
Pitch mode: +/- 0.5° pitch per click
IAS mode: +/- 1kt per click
SPD PRF mode: +/- 1kt per click
No mode: Trim adjust +/- 1. Equals pressing the 1 or 7 keys
on the numeric keypad
For flight simulation use only Revision:17.07.2006
Page 109
Das könnte Ihnen auch gefallen
- BE-76 Systems and Limitations.246151541Dokument9 SeitenBE-76 Systems and Limitations.246151541Adam Nasr El Din100% (2)
- Airbus A320 Flight Controls LawsDokument74 SeitenAirbus A320 Flight Controls Lawspontoo97% (78)
- Gulfstream G200 Pilot and Technician Training at FlightSafetyDokument11 SeitenGulfstream G200 Pilot and Technician Training at FlightSafetyMalcolm OhepNoch keine Bewertungen
- CRJ 700-900 - Aerosoft - Aircraft Operating ManualDokument50 SeitenCRJ 700-900 - Aerosoft - Aircraft Operating Manualtumb67% (3)
- Beechcraft King Air 200 PanelDokument1 SeiteBeechcraft King Air 200 PanelAlejandro100% (1)
- KING AIR 300 Study QuestionsDokument6 SeitenKING AIR 300 Study QuestionsMike100% (1)
- KFC 150 Manual's GuideDokument117 SeitenKFC 150 Manual's GuideJuan Sandoval SNoch keine Bewertungen
- Flight Manual p2002 SierraDokument74 SeitenFlight Manual p2002 SierraNiv DaganNoch keine Bewertungen
- Bombardier Challenger 601-3AER 7pDokument7 SeitenBombardier Challenger 601-3AER 7pNaili Bourhane Aboudou RahimeNoch keine Bewertungen
- Operational Suitability Data (OSD) Flight CrewDokument40 SeitenOperational Suitability Data (OSD) Flight CrewVincent Lefeuvre100% (1)
- Anywhere, Anytime in Any Environment: Pc-6 Turbo PorterDokument18 SeitenAnywhere, Anytime in Any Environment: Pc-6 Turbo PorterAura Boila100% (1)
- 690B Systems Reference Guide PDFDokument11 Seiten690B Systems Reference Guide PDFBrian AdrianNoch keine Bewertungen
- Piper Progressive Inspection 100 Hour Cycle: CheyenneDokument66 SeitenPiper Progressive Inspection 100 Hour Cycle: CheyenneJavier JaureguiNoch keine Bewertungen
- Operating The DC-3Dokument265 SeitenOperating The DC-3tumbNoch keine Bewertungen
- Aerosoft Digital Aviation CRJ Systems ManualDokument126 SeitenAerosoft Digital Aviation CRJ Systems Manualtumb100% (3)
- CRJ 700-900 - Aerosoft - Quick Reference GuideDokument140 SeitenCRJ 700-900 - Aerosoft - Quick Reference Guidetumb100% (2)
- Ex 6 - Straight and Level FlightDokument15 SeitenEx 6 - Straight and Level FlightMrunali MhatreNoch keine Bewertungen
- Fragen - Principles of FlightDokument313 SeitenFragen - Principles of FlightTomasz Kurdziel50% (2)
- Module 11A-09 Turbine Aeroplane Aerodynamics, Structures and SystemsDokument133 SeitenModule 11A-09 Turbine Aeroplane Aerodynamics, Structures and SystemsИлларион ПанасенкоNoch keine Bewertungen
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsVon EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNoch keine Bewertungen
- King Air 300: Operating HandbookDokument92 SeitenKing Air 300: Operating HandbookMoises Sanchez100% (2)
- Title Page - King Air F90Dokument1 SeiteTitle Page - King Air F90sergio0% (1)
- Pa31t OmDokument91 SeitenPa31t OmPercy HornickelNoch keine Bewertungen
- Cessna 340 Aircraft Performance and Systems OverviewDokument8 SeitenCessna 340 Aircraft Performance and Systems Overviewjoserufoperezarias100% (2)
- Big Airplane Safety A Cessna 340 340a Buyers GuideDokument12 SeitenBig Airplane Safety A Cessna 340 340a Buyers Guidelolo laurent100% (1)
- Cessna Citation Jet-Landing Gear and BrakesDokument11 SeitenCessna Citation Jet-Landing Gear and BrakesMamta KumariNoch keine Bewertungen
- Faa Flight Standarization 560 550 Board Cessna 500Dokument53 SeitenFaa Flight Standarization 560 550 Board Cessna 500gerezairNoch keine Bewertungen
- Cessna Citation Longitude Product CardDokument2 SeitenCessna Citation Longitude Product Cardlegoulu2150% (2)
- Commander - 114 - POH - 07 - 16 - 86 - Rev - 11 PDFDokument219 SeitenCommander - 114 - POH - 07 - 16 - 86 - Rev - 11 PDFnoneNoch keine Bewertungen
- C90GT Pre-Course Study GuideDokument32 SeitenC90GT Pre-Course Study GuideRaoul Penent d'Izarn100% (1)
- Commercial Genealogy: 1945 Thru 201 SerializationDokument85 SeitenCommercial Genealogy: 1945 Thru 201 Serializationnegoveio100% (1)
- 03 Expanded NormalsDokument70 Seiten03 Expanded NormalsMiguel Angel MartinNoch keine Bewertungen
- g100 ManualDokument90 Seiteng100 ManualRoman StefanitaNoch keine Bewertungen
- G1000 KingAirC90 G1000 GFC700PostInstallationCheckoutProcedureDokument109 SeitenG1000 KingAirC90 G1000 GFC700PostInstallationCheckoutProcedureWilly GrNoch keine Bewertungen
- CM2 Instrument Panel PDFDokument1 SeiteCM2 Instrument Panel PDFPablo Contreras100% (1)
- b-200 Title PDFDokument2 Seitenb-200 Title PDFravaiyamayankNoch keine Bewertungen
- Aerobask Phenom 300 - Flight ManualDokument31 SeitenAerobask Phenom 300 - Flight ManualFloa FNNoch keine Bewertungen
- THE SUPER VERSATILE JET: YOUR OWN PILATUS JETDokument52 SeitenTHE SUPER VERSATILE JET: YOUR OWN PILATUS JETviola beck100% (1)
- Duke b60 Turbine ChecklistDokument2 SeitenDuke b60 Turbine Checklistminka646100% (1)
- King Air GVBCD Operations ManualDokument50 SeitenKing Air GVBCD Operations ManualBrendanRatchford100% (2)
- Beechcraft Baron Auxiliary Fuel Tank Annunciator Light SupplementDokument400 SeitenBeechcraft Baron Auxiliary Fuel Tank Annunciator Light SupplementMajved Ariel HassanNoch keine Bewertungen
- Fly from Palm Springs to Burbank in Cessna 441 Conquest IIDokument10 SeitenFly from Palm Springs to Burbank in Cessna 441 Conquest IIJosé A. Montiel QuirósNoch keine Bewertungen
- FSX Beech King Air 350Dokument4 SeitenFSX Beech King Air 350lkuduaviczNoch keine Bewertungen
- CJP Sops 525 Pro Line 21 - V1.0Dokument37 SeitenCJP Sops 525 Pro Line 21 - V1.0Batu HanNoch keine Bewertungen
- Beechjet 400A - Beechjet 400 Panel Poster Revision 3 01-14 PDFDokument1 SeiteBeechjet 400A - Beechjet 400 Panel Poster Revision 3 01-14 PDFJosé Rezende100% (1)
- Cessna Aircraft GroupDokument124 SeitenCessna Aircraft GroupJuan Carlos Aguila LopezNoch keine Bewertungen
- Challenger 300 ManualDokument16 SeitenChallenger 300 Manualjuan romeroNoch keine Bewertungen
- Bonanza A36 PohDokument250 SeitenBonanza A36 Pohalvarone100% (1)
- King Air c90Dokument61 SeitenKing Air c90PeterNoch keine Bewertungen
- H800 Training GuideDokument26 SeitenH800 Training GuideManolo FernandezNoch keine Bewertungen
- Hawker 900XP Review Flight Global 2008Dokument10 SeitenHawker 900XP Review Flight Global 2008albucurNoch keine Bewertungen
- BeechcraftDokument1 SeiteBeechcraftAndy Holloway100% (1)
- Grand Caravans DDokument26 SeitenGrand Caravans DEdley CandeiasNoch keine Bewertungen
- Embraer Praetor 600 FolioDokument25 SeitenEmbraer Praetor 600 FolioNaili Bourhane Aboudou RahimeNoch keine Bewertungen
- G3 Self CheckDokument94 SeitenG3 Self CheckSantiago Hidalgo100% (1)
- Cu FlashcardsDokument163 SeitenCu FlashcardsHrishikesh Narasimhan100% (1)
- Turbo Commander MELDokument53 SeitenTurbo Commander MELAndre Peli100% (5)
- Pilatus Aircraft LTD PC 12NG JustTheFactsDokument10 SeitenPilatus Aircraft LTD PC 12NG JustTheFactsEmanuel Pop100% (1)
- Cessna Citation II BravoDokument20 SeitenCessna Citation II BravoSantiago Patitucci100% (1)
- Commander Package 2013Dokument20 SeitenCommander Package 2013Carlos Marquez100% (1)
- Cheyenne - Pressurization SystemDokument3 SeitenCheyenne - Pressurization Systemtumb100% (1)
- 04 LimitationsDokument38 Seiten04 LimitationsCarlos Marques100% (1)
- Cessna 340: - Number 2 - February 2004Dokument14 SeitenCessna 340: - Number 2 - February 2004Luis AndViNoch keine Bewertungen
- C90B Performance TablesDokument8 SeitenC90B Performance TablesCarlos MarquezNoch keine Bewertungen
- 10 - Cheyenne IIXL Norm Proc Handbook - Rev 0 PDFDokument17 Seiten10 - Cheyenne IIXL Norm Proc Handbook - Rev 0 PDFRoberto JuniorNoch keine Bewertungen
- Cessna Citation Excel Light Jet Flexibility with Midsize Cabin ComfortDokument4 SeitenCessna Citation Excel Light Jet Flexibility with Midsize Cabin ComfortJuanOñateNoch keine Bewertungen
- Cessna Citation Sovereign-Flight ControlslDokument11 SeitenCessna Citation Sovereign-Flight ControlslAjie DendyNoch keine Bewertungen
- CH Fighterstick Vintage VersionDokument3 SeitenCH Fighterstick Vintage VersiontumbNoch keine Bewertungen
- Donallcardsatrformracecard 2 PageDokument5 SeitenDonallcardsatrformracecard 2 PagetumbNoch keine Bewertungen
- JD CL - Atr - 2023 - 1.32.2Dokument4 SeitenJD CL - Atr - 2023 - 1.32.2tumb100% (1)
- 03 PerformanceDokument120 Seiten03 PerformancetumbNoch keine Bewertungen
- Cessna 208B Operating Limitations and MarkingsDokument62 SeitenCessna 208B Operating Limitations and MarkingstumbNoch keine Bewertungen
- Weight and Balance/ Equipment ListDokument56 SeitenWeight and Balance/ Equipment ListtumbNoch keine Bewertungen
- Rate of Climb-DescentDokument1.064 SeitenRate of Climb-DescenttumbNoch keine Bewertungen
- PERFORMANCE Caravan EXDokument46 SeitenPERFORMANCE Caravan EXtumbNoch keine Bewertungen
- Cessna Citation CJ4 Operator's GuideDokument103 SeitenCessna Citation CJ4 Operator's GuidetumbNoch keine Bewertungen
- 208bphcus 00Dokument70 Seiten208bphcus 00Joao Paulo RibeiroNoch keine Bewertungen
- Cepheus Engine SRDDokument208 SeitenCepheus Engine SRDtumbNoch keine Bewertungen
- Working Title Citation CJ4: Quick Reference ChecklistDokument4 SeitenWorking Title Citation CJ4: Quick Reference ChecklisttomrachNoch keine Bewertungen
- Aguilas y MisilesDokument10 SeitenAguilas y MisilestumbNoch keine Bewertungen
- Mini Rogue - Rules v1.2.1Dokument8 SeitenMini Rogue - Rules v1.2.1Oscar ManriqueNoch keine Bewertungen
- CH Throttle Upgrade With Rel4y's 12 Bit PCB and Magnetic SensorDokument11 SeitenCH Throttle Upgrade With Rel4y's 12 Bit PCB and Magnetic SensortumbNoch keine Bewertungen
- CRJ900 - TutorialDokument83 SeitenCRJ900 - Tutorialtumb0% (1)
- Chapter 2: Learning To TurnDokument29 SeitenChapter 2: Learning To TurntumbNoch keine Bewertungen
- Made With CCDokument176 SeitenMade With CCAmanda BakemonoNoch keine Bewertungen
- Airbus A319 TutorialDokument32 SeitenAirbus A319 Tutorialflash_1981Noch keine Bewertungen
- Learn to Fly the F-16 in Falcon 4.0Dokument18 SeitenLearn to Fly the F-16 in Falcon 4.0tumbNoch keine Bewertungen
- CombatFlight Simulator 3 ReviewDokument14 SeitenCombatFlight Simulator 3 ReviewtumbNoch keine Bewertungen
- Weather Radar Tutorial (Network) : Home Fmgs Builder Notes Media Reviews Safety Avmed Services MiscDokument11 SeitenWeather Radar Tutorial (Network) : Home Fmgs Builder Notes Media Reviews Safety Avmed Services MisctumbNoch keine Bewertungen
- Chuck'S Guides - FSX Fslabs A320 Chuck'S Guides - FSX Fslabs A320Dokument6 SeitenChuck'S Guides - FSX Fslabs A320 Chuck'S Guides - FSX Fslabs A320tumbNoch keine Bewertungen
- ProSimA320 TutorialDokument4 SeitenProSimA320 TutorialtumbNoch keine Bewertungen
- CRJ1000APMR8Dokument118 SeitenCRJ1000APMR8Amr KhalidNoch keine Bewertungen
- FlightFactor Airbus A320 - Configuration and KeysDokument9 SeitenFlightFactor Airbus A320 - Configuration and Keystumb0% (1)
- Rand Robinson KR2 ZS-WEC Flight ManualDokument50 SeitenRand Robinson KR2 ZS-WEC Flight Manualviorelu99100% (1)
- Aircraft General FeedbackDokument63 SeitenAircraft General Feedbackmomanbh100% (1)
- 0Dokument8 Seiten0Brian NolascoNoch keine Bewertungen
- Cessna 172 ChecklistDokument38 SeitenCessna 172 Checklistesubalew galloNoch keine Bewertungen
- Ikarus C42 Pilot Operating HandbookDokument43 SeitenIkarus C42 Pilot Operating HandbookRONILSONNoch keine Bewertungen
- MD-80 Secondary Flight ControlDokument16 SeitenMD-80 Secondary Flight Controlalifaqmar norazmiNoch keine Bewertungen
- P180 Avanti-Specification and DescriptionDokument61 SeitenP180 Avanti-Specification and Descriptionandriaerospace100% (1)
- RV4 PohDokument55 SeitenRV4 PohSteve BucheltNoch keine Bewertungen
- Tutorial 3 - SolutionDokument5 SeitenTutorial 3 - SolutionHIMANSHU VERMANoch keine Bewertungen
- Piper PA28 Arrow - ChecklistDokument2 SeitenPiper PA28 Arrow - ChecklistJoão SantosNoch keine Bewertungen
- RV10 Poh RevADokument28 SeitenRV10 Poh RevAGabriel BispoNoch keine Bewertungen
- Normal ProceduresDokument32 SeitenNormal ProcedurestumbNoch keine Bewertungen
- European Aviation Safety Agency: Easa Restricted-Type Certificate Data Sheet EASA - IM.A.351Dokument22 SeitenEuropean Aviation Safety Agency: Easa Restricted-Type Certificate Data Sheet EASA - IM.A.351Dan CaragicaNoch keine Bewertungen
- Yamaha F25AETDokument88 SeitenYamaha F25AETcarylangley100% (1)
- 109-590010-23 - F-90Dokument89 Seiten109-590010-23 - F-90Raul Prieto100% (1)
- C152 ChecklistDokument11 SeitenC152 Checklistjgills240100% (2)
- Flight Controls1Dokument125 SeitenFlight Controls1abdul masudNoch keine Bewertungen
- AVT 1100 - Lesson 4 PDFDokument21 SeitenAVT 1100 - Lesson 4 PDFVăn Nguyễn DuyNoch keine Bewertungen
- Aircraft Control SystemDokument145 SeitenAircraft Control Systemabdel4aliNoch keine Bewertungen
- Cessna 172 Skyhawk, Owners Manual, (English) Manual Del RioDokument48 SeitenCessna 172 Skyhawk, Owners Manual, (English) Manual Del Riofedor andres100% (1)
- Radio Navigation and Principles of FlightDokument49 SeitenRadio Navigation and Principles of FlightMahesh MahajanNoch keine Bewertungen
- Checklist for Mooney M20R preflight inspectionDokument14 SeitenChecklist for Mooney M20R preflight inspectionJoão SantosNoch keine Bewertungen
- FAR 23 Training OutlineDokument3 SeitenFAR 23 Training Outlinesadi_koaNoch keine Bewertungen
- C182S Checklist ProceduresDokument22 SeitenC182S Checklist ProceduresMichael LinnNoch keine Bewertungen
- Falco Construction DrawingsDokument5 SeitenFalco Construction DrawingsazawahkNoch keine Bewertungen