Das könnte Ihnen auch gefallen
- CounterDokument11 SeitenCounterDatpmNoch keine Bewertungen
- Integrated Circuits Data Sheet for SAA1057 Radio Tuning PLL Frequency Synthesizer ICDokument13 SeitenIntegrated Circuits Data Sheet for SAA1057 Radio Tuning PLL Frequency Synthesizer ICulil amriNoch keine Bewertungen
- Generate frequencies from 9.2 to 12.19 MHz using MC145170 PLLDokument6 SeitenGenerate frequencies from 9.2 to 12.19 MHz using MC145170 PLLftbenji123Noch keine Bewertungen
- GM16C550Dokument23 SeitenGM16C550kranti06Noch keine Bewertungen
- Data Sheet: Radio Tuning PLL Frequency SynthesizerDokument13 SeitenData Sheet: Radio Tuning PLL Frequency SynthesizerElchat InternacionalNoch keine Bewertungen
- Book PIC Microcontrollers-Chapter 4 TimersDokument13 SeitenBook PIC Microcontrollers-Chapter 4 TimersHammamiSalahNoch keine Bewertungen
- Siren Project With Pic MicrocontrollerDokument12 SeitenSiren Project With Pic MicrocontrollerMatthew Hunter100% (1)
- Chapter 6 TimersDokument29 SeitenChapter 6 Timersellyshacb-wp21Noch keine Bewertungen
- AM RET670 SettingExample2 RBDokument21 SeitenAM RET670 SettingExample2 RBKUNALJAY100% (1)
- Realizing Precision Timing With The MSP430Dokument40 SeitenRealizing Precision Timing With The MSP430anon_312676694Noch keine Bewertungen
- Scientific Function GeneratorDokument5 SeitenScientific Function Generatorpranjal sanjanwalaNoch keine Bewertungen
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosDokument24 SeitenNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierNoch keine Bewertungen
- Design Note Dn508: Frequency Scanning Using Cc430Fx, Cc110X, and Cc111XfxDokument10 SeitenDesign Note Dn508: Frequency Scanning Using Cc430Fx, Cc110X, and Cc111XfxspectrorunNoch keine Bewertungen
- Frequency MeterDokument5 SeitenFrequency Meterlaithnatour0% (1)
- AVR_Timers0Dokument32 SeitenAVR_Timers0Muhammad ejaz RamzanNoch keine Bewertungen
- F 818Dokument9 SeitenF 818Eric YangNoch keine Bewertungen
- Chapter 5 TimerDokument30 SeitenChapter 5 TimerAndy WoNoch keine Bewertungen
- DFGSDGDokument3 SeitenDFGSDGTuyen DinhNoch keine Bewertungen
- MICROCONTROLLER-BASED TACHOMETERDokument4 SeitenMICROCONTROLLER-BASED TACHOMETERB Hari KrishnaNoch keine Bewertungen
- Increase The Frequency Resolution of PWM ModulesDokument10 SeitenIncrease The Frequency Resolution of PWM Modulesxeratule100% (1)
- Microcontroller Based Inductance Capacitance Meter: Mudit AgarwalDokument5 SeitenMicrocontroller Based Inductance Capacitance Meter: Mudit AgarwalNavneet R. SahareyNoch keine Bewertungen
- Ic 4047Dokument15 SeitenIc 4047Suganyaa Velusamy VNoch keine Bewertungen
- HT66F018 PTM IR Carrier Function Application Example: D/N HA0 326EDokument10 SeitenHT66F018 PTM IR Carrier Function Application Example: D/N HA0 326EHenrique Cesar Pellegrino MasettoNoch keine Bewertungen
- Yzers Network Anal Yzers: Z To 6 GHZ 243 RF Network Analyzer, 300 KHZ To 6 GHZDokument2 SeitenYzers Network Anal Yzers: Z To 6 GHZ 243 RF Network Analyzer, 300 KHZ To 6 GHZdspa123Noch keine Bewertungen
- PWM Freq Arduino DueDokument9 SeitenPWM Freq Arduino DueEdgar Eduardo Medina CastañedaNoch keine Bewertungen
- CHASSIS PCMA001S Schematic and ModificationsDokument15 SeitenCHASSIS PCMA001S Schematic and ModificationsDan SorinNoch keine Bewertungen
- XR-215 PLLDokument32 SeitenXR-215 PLLJ Jesús Villanueva GarcíaNoch keine Bewertungen
- HCC/HCF4026B HCC/HCF4033B: 7-Segment Display Outputs Decade Counters/Dividers With DecodedDokument16 SeitenHCC/HCF4026B HCC/HCF4033B: 7-Segment Display Outputs Decade Counters/Dividers With DecodednokiapcNoch keine Bewertungen
- 16 Bit Tim.& Coun.Dokument22 Seiten16 Bit Tim.& Coun.Dileep guptaNoch keine Bewertungen
- Timer 2Dokument29 SeitenTimer 2Cesar Matos100% (2)
- BooksDokument14 SeitenBookssravyaNoch keine Bewertungen
- !MC3362DWDokument9 Seiten!MC3362DWBalázs JákóNoch keine Bewertungen
- 29ltd-st 29wx-st SM pg12 pg34Dokument23 Seiten29ltd-st 29wx-st SM pg12 pg34Jesus Antonio Gonzalez QuinteroNoch keine Bewertungen
- Mantenimiento MamografoDokument19 SeitenMantenimiento Mamografopickitt2hb100% (4)
- ELEC 4210 Electronics Design Project ReportDokument43 SeitenELEC 4210 Electronics Design Project ReportTamy Lorena de SouzaNoch keine Bewertungen
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerDokument12 Seiten16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsNoch keine Bewertungen
- 05 AVR Timer-Counter AVRDokument95 Seiten05 AVR Timer-Counter AVRPriscillaNoch keine Bewertungen
- 4026 Contador DecoDokument15 Seiten4026 Contador DecoErick Tamayo LoezaNoch keine Bewertungen
- TimersDokument3 SeitenTimersClein Alexander SarmientoNoch keine Bewertungen
- LM1871 RC Encoder/Transmitter: General Description FeaturesDokument19 SeitenLM1871 RC Encoder/Transmitter: General Description FeaturesbabichemNoch keine Bewertungen
- 74C373Dokument11 Seiten74C373Juan Orlando MontesNoch keine Bewertungen
- LM1871 RC EncoderTransmitter General DescriptionDokument18 SeitenLM1871 RC EncoderTransmitter General Descriptionmicrowave440Noch keine Bewertungen
- NE/SE564 Phase-Locked Loop: Description Pin ConfigurationsDokument9 SeitenNE/SE564 Phase-Locked Loop: Description Pin Configurationskmilo7darkNoch keine Bewertungen
- Low Power FM Transmitter System: Semiconductor Technical DataDokument8 SeitenLow Power FM Transmitter System: Semiconductor Technical Datadimasalang951Noch keine Bewertungen
- MF10-N Universal Monolithic Dual Switched Capacitor Filter: Features DescriptionDokument35 SeitenMF10-N Universal Monolithic Dual Switched Capacitor Filter: Features DescriptionAlbeiro Yr TrancerNoch keine Bewertungen
- C2 - TimersDokument41 SeitenC2 - TimersMifzal IzzaniNoch keine Bewertungen
- Microcontroller-based Tachometer Measures RPM Under 40 CharactersDokument13 SeitenMicrocontroller-based Tachometer Measures RPM Under 40 CharactersmounikabhavanaNoch keine Bewertungen
- 8051 CHIP TIME DELAYSDokument8 Seiten8051 CHIP TIME DELAYSMARIANONoch keine Bewertungen
- UC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllerDokument15 SeitenUC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllertoajuiceNoch keine Bewertungen
- 8051 Assembly BriefDokument8 Seiten8051 Assembly BriefRaja Pathamuthu.GNoch keine Bewertungen
- LM494 Pulse Width Modulated Control Circuit: General Description FeaturesDokument9 SeitenLM494 Pulse Width Modulated Control Circuit: General Description FeaturesAndré Frota PaivaNoch keine Bewertungen
- HCS12 Timer System PDFDokument15 SeitenHCS12 Timer System PDFAbhinav KaranNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- 110 Waveform Generator Projects for the Home ConstructorVon Everand110 Waveform Generator Projects for the Home ConstructorBewertung: 4 von 5 Sternen4/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Von EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Bewertung: 4.5 von 5 Sternen4.5/5 (3)
- Troubleshooting PDFDokument49 SeitenTroubleshooting PDFHedenarol Ramirez RojasNoch keine Bewertungen
- Pic Usb 4550Dokument6 SeitenPic Usb 4550Minh Nguyễn Văn100% (3)
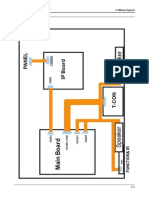
- Wiring Diagram PDFDokument5 SeitenWiring Diagram PDFHedenarol Ramirez RojasNoch keine Bewertungen
- Product Specification PDFDokument15 SeitenProduct Specification PDFHedenarol Ramirez RojasNoch keine Bewertungen
- Picdem Fs UsbDokument48 SeitenPicdem Fs UsbHedenarol Ramirez RojasNoch keine Bewertungen
- Satellite NIM Tuner Module: Product RangeDokument2 SeitenSatellite NIM Tuner Module: Product RangeHedenarol Ramirez RojasNoch keine Bewertungen
- Cover PDFDokument3 SeitenCover PDFHedenarol Ramirez Rojas100% (1)
- SAMSUNG TFT-LCD 933HD (LS19CFE) - PrecautionDokument4 SeitenSAMSUNG TFT-LCD 933HD (LS19CFE) - PrecautionJoão LopesNoch keine Bewertungen
- Disassembly & Reassembly PDFDokument5 SeitenDisassembly & Reassembly PDFHedenarol Ramirez RojasNoch keine Bewertungen
- 8710 ADokument82 Seiten8710 AHedenarol Ramirez RojasNoch keine Bewertungen
- Tda18250hn SdsDokument8 SeitenTda18250hn SdsHedenarol Ramirez RojasNoch keine Bewertungen
- CD00227067 Sti5197Dokument4 SeitenCD00227067 Sti5197Hedenarol Ramirez RojasNoch keine Bewertungen
- FC2226 ADokument2 SeitenFC2226 AHedenarol Ramirez RojasNoch keine Bewertungen
- Migrating Applications To USB From RS-232 UART PDFDokument16 SeitenMigrating Applications To USB From RS-232 UART PDFGligor ClaudiuNoch keine Bewertungen
- Office 2010 SerialDokument1 SeiteOffice 2010 SerialHedenarol Ramirez RojasNoch keine Bewertungen
- TL-WN722N User GuideDokument49 SeitenTL-WN722N User GuideIvan StefanovNoch keine Bewertungen
- Ccs C ManualDokument363 SeitenCcs C ManualpindyNoch keine Bewertungen
- Ultraiso Name: UW-Madison Executive Education Code: 1519-E287-A828-A24ADokument1 SeiteUltraiso Name: UW-Madison Executive Education Code: 1519-E287-A828-A24AHedenarol Ramirez RojasNoch keine Bewertungen
- Tda 9102 CDokument8 SeitenTda 9102 CHedenarol Ramirez RojasNoch keine Bewertungen
- micro-SD Card Adapter (#32312) : FeaturesDokument4 Seitenmicro-SD Card Adapter (#32312) : FeaturesHedenarol Ramirez RojasNoch keine Bewertungen
- Tda18250hn SdsDokument8 SeitenTda18250hn SdsHedenarol Ramirez RojasNoch keine Bewertungen
- Datasheet 7Dokument45 SeitenDatasheet 7Hedenarol Ramirez RojasNoch keine Bewertungen
- ValidacionDokument1 SeiteValidacionHedenarol Ramirez RojasNoch keine Bewertungen