Das könnte Ihnen auch gefallen
- Warning: ESD5200 Series Speed Control UnitDokument6 SeitenWarning: ESD5200 Series Speed Control UnitAnas BasarahNoch keine Bewertungen
- Esd2400 Series: Ngine Overning YstemsDokument6 SeitenEsd2400 Series: Ngine Overning YstemsAnas BasarahNoch keine Bewertungen
- Esd5500E Series Speed Control Tlnit: WarningDokument5 SeitenEsd5500E Series Speed Control Tlnit: WarningKarla HolandaNoch keine Bewertungen
- ESD-5550/5570 Series - Speed Control Unit: Technical InformationDokument12 SeitenESD-5550/5570 Series - Speed Control Unit: Technical InformationCarlos Molina100% (1)
- Ngine Overning Ystems: Generator Frequency Sensing Speed Control UnitDokument6 SeitenNgine Overning Ystems: Generator Frequency Sensing Speed Control Unitjuan narvaezNoch keine Bewertungen
- Warning: ESD5500E Series Speed Control UnitDokument6 SeitenWarning: ESD5500E Series Speed Control UnitLuis Alberto LopezNoch keine Bewertungen
- ESD5100 Series Speed Control UnitDokument2 SeitenESD5100 Series Speed Control UnitJaimeCoelloNoch keine Bewertungen
- Speed Control GAC ESD5500Dokument8 SeitenSpeed Control GAC ESD5500Manuel Otero80% (5)
- Esd5500E Series Speed Control Unit: Product Technical Information PTI 1002EDokument7 SeitenEsd5500E Series Speed Control Unit: Product Technical Information PTI 1002EalstomNoch keine Bewertungen
- Reg. Velocidade GAC ESD 5550 5570Dokument8 SeitenReg. Velocidade GAC ESD 5550 5570thyagoenerg100% (1)
- Manual Regulador de Velocidade Gac Esd 5111 PDFDokument2 SeitenManual Regulador de Velocidade Gac Esd 5111 PDFGugui68100% (1)
- ESD5100 Series Speed Control UnitDokument2 SeitenESD5100 Series Speed Control Unitajcapetillog100% (2)
- Table 1.: InstallationDokument12 SeitenTable 1.: InstallationRicardo MonteroNoch keine Bewertungen
- Electronic Governor CatalogDokument26 SeitenElectronic Governor CatalogAung Mh100% (1)
- GOB EG1065x Manual en PDFDokument8 SeitenGOB EG1065x Manual en PDFRonaldCarrasquelNoch keine Bewertungen
- Generator Automatic Voltage Regulator Operation Manual: Tel: - Fax: - @Dokument8 SeitenGenerator Automatic Voltage Regulator Operation Manual: Tel: - Fax: - @Syed Mohammad Naveed100% (1)
- EG1065X Governor McPhersonDokument7 SeitenEG1065X Governor McPhersonOrlando GalvanNoch keine Bewertungen
- DYN1-10693-001-0-12 or DYN1-10693-001-0-24 PDFDokument8 SeitenDYN1-10693-001-0-12 or DYN1-10693-001-0-24 PDFSyed Mohammad Naveed100% (1)
- DYN1-10693-001-0-12 or DYN1-10693-001-0-24 PDFDokument8 SeitenDYN1-10693-001-0-12 or DYN1-10693-001-0-24 PDFSyed Mohammad NaveedNoch keine Bewertungen
- ESD-5500E Series: Analogue Speed GovernorsDokument4 SeitenESD-5500E Series: Analogue Speed GovernorsVasil Stoianov100% (1)
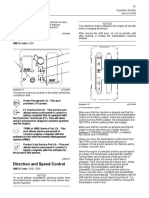
- CAT-777F-Direction and Speed ControlDokument2 SeitenCAT-777F-Direction and Speed ControlCybergoNoch keine Bewertungen
- Esd-5200 DS en 03.2011 V1.0Dokument4 SeitenEsd-5200 DS en 03.2011 V1.0BryanLeonardoOspinoReinaNoch keine Bewertungen
- Gen Stepper CTRLDokument1 SeiteGen Stepper CTRLsparky1Noch keine Bewertungen
- ESD5522E Generator Speed Control UnitDokument2 SeitenESD5522E Generator Speed Control UnitKhaled KamelNoch keine Bewertungen
- Eg1069x Manual en PDFDokument24 SeitenEg1069x Manual en PDFtecnigenelecNoch keine Bewertungen
- Manual Regulador de Velocidade Gac Esd 5111Dokument2 SeitenManual Regulador de Velocidade Gac Esd 5111Paulo Alves100% (2)
- FSK-628D Gobernador Electronico de MotorDokument35 SeitenFSK-628D Gobernador Electronico de Motorsoldadores motoresNoch keine Bewertungen
- Gac Esd5500Dokument7 SeitenGac Esd5500christramNoch keine Bewertungen
- Detector Service ManualDokument4 SeitenDetector Service Manualkhanh khanhNoch keine Bewertungen
- 2301A Speed Control: ApplicationsDokument4 Seiten2301A Speed Control: ApplicationsFabio Andres Plata TorresNoch keine Bewertungen
- Tarjeta VelocidadDokument9 SeitenTarjeta Velocidaddiego100% (1)
- Gac Ecc328 ManualDokument4 SeitenGac Ecc328 ManualAnonymous d2ofVvJNoch keine Bewertungen
- ADD 103 Series PTI2045ADokument4 SeitenADD 103 Series PTI2045ALeonardo LimbergerNoch keine Bewertungen
- Ec5000 6-09 PDFDokument5 SeitenEc5000 6-09 PDFAnonymous M0OEZEKoGiNoch keine Bewertungen
- 2110 V1.0 ESD 5330 Technical Information 09 07 10 MH en PDFDokument13 Seiten2110 V1.0 ESD 5330 Technical Information 09 07 10 MH en PDFSamir KhanNoch keine Bewertungen
- ht-hsg100 Ds en 04-2014 v1-1Dokument4 Seitenht-hsg100 Ds en 04-2014 v1-1Basaveswar KorlaNoch keine Bewertungen
- EG3000 Manual PDFDokument7 SeitenEG3000 Manual PDFrepelindNoch keine Bewertungen
- BPM24RT100BL Specspecifications UpdateDokument8 SeitenBPM24RT100BL Specspecifications UpdatemalleNoch keine Bewertungen
- EG3000 ManualDokument7 SeitenEG3000 ManualJose Armando Perez AcostaNoch keine Bewertungen
- Pti1000 Esd5100 SeriesDokument2 SeitenPti1000 Esd5100 SeriesRamon Thales DomeniconiNoch keine Bewertungen
- E 391 Manual 1Dokument6 SeitenE 391 Manual 1naruto akatcyNoch keine Bewertungen
- 2301A Speed Control: ApplicationsDokument4 Seiten2301A Speed Control: ApplicationsS M NaveedNoch keine Bewertungen
- Product Information: DYNA ControllersDokument4 SeitenProduct Information: DYNA ControllersmarceloNoch keine Bewertungen
- Woodward Ug40d GovernorDokument4 SeitenWoodward Ug40d Governorbuat akun100% (2)
- 2301A Speed Control: ApplicationsDokument4 Seiten2301A Speed Control: ApplicationsAshly JosephNoch keine Bewertungen
- VOLVO Speed Governor ESD 5500E Technical InformationDokument10 SeitenVOLVO Speed Governor ESD 5500E Technical Informationdaniel_ting_1Noch keine Bewertungen
- Woodward Speed Droop PDFDokument8 SeitenWoodward Speed Droop PDFedgarlimas100% (1)
- 2301A Speed Control: ApplicationsDokument4 Seiten2301A Speed Control: ApplicationsSandeep Kumar KaloniyaNoch keine Bewertungen
- 4500e DC Motor Controller InstructionsDokument1 Seite4500e DC Motor Controller InstructionsKalyani GangulianNoch keine Bewertungen
- Introduction To Turbine Governing SystemsDokument33 SeitenIntroduction To Turbine Governing SystemsSam100% (1)
- PGG Governor: Sets Speed/power Output From A Remote LocationDokument4 SeitenPGG Governor: Sets Speed/power Output From A Remote LocationDima ZayatsNoch keine Bewertungen
- Delco Radio Owner's Manual Model 633; Delcotron Generator InstallationVon EverandDelco Radio Owner's Manual Model 633; Delcotron Generator InstallationNoch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Diesel Engine Care and Repair: A Captain's Quick GuideVon EverandDiesel Engine Care and Repair: A Captain's Quick GuideBewertung: 5 von 5 Sternen5/5 (1)
- Marine Electrics Made Simple or How to Keep the Batteries ChargedVon EverandMarine Electrics Made Simple or How to Keep the Batteries ChargedNoch keine Bewertungen
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesVon EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- MV Trafo SB - SMC - STP TI US - en 10 PDFDokument6 SeitenMV Trafo SB - SMC - STP TI US - en 10 PDFVictor ToledanoNoch keine Bewertungen
- S-18 3150 Overvoltages and Insulation Coordination PDFDokument63 SeitenS-18 3150 Overvoltages and Insulation Coordination PDFroyclhorNoch keine Bewertungen
- Ti-Spc-Psi-Protct-6070 (9 08) PDFDokument49 SeitenTi-Spc-Psi-Protct-6070 (9 08) PDFsrdeetrdsbc100% (2)
- Determination of The Electron Specific MassDokument2 SeitenDetermination of The Electron Specific MassAdina BlazeNoch keine Bewertungen
- Aluminum Lithium Alloy Welding Process FeaturesDokument82 SeitenAluminum Lithium Alloy Welding Process FeaturesMitone DiazNoch keine Bewertungen
- 9311 - CMOS Analog Design Chapter 10Dokument23 Seiten9311 - CMOS Analog Design Chapter 10raju.kprr8862Noch keine Bewertungen
- CfbampDokument1 SeiteCfbampIr GarNoch keine Bewertungen
- EL1021L Ohms Law Basic Electrical Fundamental - WK3Dokument27 SeitenEL1021L Ohms Law Basic Electrical Fundamental - WK3Dexrey John QuizanNoch keine Bewertungen
- Project Report On Input Power Factor Correction of Ac To DC Converter CircuitDokument57 SeitenProject Report On Input Power Factor Correction of Ac To DC Converter CircuitAkshyat Das100% (7)
- DHP-Series Operation Manual M550004-01Dokument56 SeitenDHP-Series Operation Manual M550004-01Dumi BogdanNoch keine Bewertungen
- Power Electronics Chapter#11Dokument25 SeitenPower Electronics Chapter#11Bilal HussainNoch keine Bewertungen
- RK 49 - Ds - en PDFDokument5 SeitenRK 49 - Ds - en PDFPedro Javier Castro SanchezNoch keine Bewertungen
- Trends in Electrical TransmissionDokument47 SeitenTrends in Electrical TransmissionSumit Kumar DattaNoch keine Bewertungen
- Integrated Science Form 2 June 2010Dokument9 SeitenIntegrated Science Form 2 June 2010asjawolverine0% (2)
- Product/Process Change Notice (PCNDokument2 SeitenProduct/Process Change Notice (PCNJoseph BernardNoch keine Bewertungen
- EXPERIMENT Capacitor RC CircuitDokument4 SeitenEXPERIMENT Capacitor RC Circuitfaiz shukriNoch keine Bewertungen
- Electronics RLDokument6 SeitenElectronics RLSheharyar MunirNoch keine Bewertungen
- Gate Turn Off Thyristors GTODokument16 SeitenGate Turn Off Thyristors GTOElrich Joseph JalandoniNoch keine Bewertungen
- Basic ECEDokument2 SeitenBasic ECEmarkvillaplazaNoch keine Bewertungen
- Yx 360 TRDokument14 SeitenYx 360 TRNovian ArmaNoch keine Bewertungen
- ITC - Power Factor CorrectionDokument92 SeitenITC - Power Factor Correctiongopir28Noch keine Bewertungen
- DIY DC ArcWelderDokument3 SeitenDIY DC ArcWeldersituationsNoch keine Bewertungen
- Slim TV Service Manual - Sy33 ChassisDokument45 SeitenSlim TV Service Manual - Sy33 ChassisUmar MajeedNoch keine Bewertungen
- Design and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemDokument6 SeitenDesign and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemS.m. FerdousNoch keine Bewertungen
- Iu.e5.116.0 XCSW240Dokument2 SeitenIu.e5.116.0 XCSW240FolpoNoch keine Bewertungen
- Features Description: 2K X 8 Asynchronous CMOS Static RAMDokument8 SeitenFeatures Description: 2K X 8 Asynchronous CMOS Static RAMKontak SynthetizadorNoch keine Bewertungen
- Electrical Steel, Also Called Lamination Steel, Silicon Electrical Steel, Silicon Steel or Transformer Steel, Is SpecialtyDokument5 SeitenElectrical Steel, Also Called Lamination Steel, Silicon Electrical Steel, Silicon Steel or Transformer Steel, Is SpecialtyShobhit MauryaNoch keine Bewertungen
- Wharfedale TITAN SUB-A12 - 1-400wDokument13 SeitenWharfedale TITAN SUB-A12 - 1-400wNguyễn Quang TrânNoch keine Bewertungen
- Iv RepotDokument16 SeitenIv Repotneethurj9Noch keine Bewertungen
- AC Measurements and Diode CircuitsDokument3 SeitenAC Measurements and Diode CircuitsJenina Margareth Aldaba CastroNoch keine Bewertungen