Das könnte Ihnen auch gefallen
- Cours MicrDokument30 SeitenCours MicrDOUNIANoch keine Bewertungen
- CoursDokument61 SeitenCoursBen Aissa ChokriNoch keine Bewertungen
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- Chapitre 2 - Partie 1 - CSMTDokument28 SeitenChapitre 2 - Partie 1 - CSMTsalman wardiNoch keine Bewertungen
- TD 2 Liaisons Schéma CinématiqueDokument6 SeitenTD 2 Liaisons Schéma CinématiqueNadhir MehellouNoch keine Bewertungen
- Cours CPGE - Modélisation Des Actions MécaniquesDokument11 SeitenCours CPGE - Modélisation Des Actions MécaniquesAnonymous OG8ApT4go100% (2)
- Exercice ReducteurDokument8 SeitenExercice ReducteurGyNoch keine Bewertungen
- Représentation GraphiqueDokument7 SeitenReprésentation GraphiquetaiebshowNoch keine Bewertungen
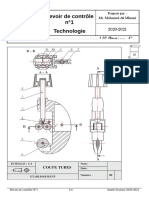
- 1TC-Devoir de Controle Numéro 1 2020-2021Dokument4 Seiten1TC-Devoir de Controle Numéro 1 2020-2021tayahiNoch keine Bewertungen
- Chaîne D'energie Fonction Transmettre Solidworks Doc-Prof MoukhtariDokument12 SeitenChaîne D'energie Fonction Transmettre Solidworks Doc-Prof MoukhtariELMustaphaELMoukhtariNoch keine Bewertungen
- Cours Modelisation Des Liaisons eDokument7 SeitenCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- Cine Graph EleveDokument8 SeitenCine Graph EleveMohammed DahbiNoch keine Bewertungen
- devoirN2CotationFonctionelle2AsGriffe2012 PDFDokument4 SeitendevoirN2CotationFonctionelle2AsGriffe2012 PDFlassouedNoch keine Bewertungen
- TD Révision Cinématique - Rotation Translation - v1-1Dokument3 SeitenTD Révision Cinématique - Rotation Translation - v1-1osndfgvouigosnjNoch keine Bewertungen
- 1ère TSI 15-16 (DOC ELEVE')Dokument154 Seiten1ère TSI 15-16 (DOC ELEVE')immane.imNoch keine Bewertungen
- Liaisons Schema EleveDokument2 SeitenLiaisons Schema ElevewoulkanNoch keine Bewertungen
- TD ÉlèveDokument4 SeitenTD ÉlèveSamba SallNoch keine Bewertungen
- 00b Cours Perspective CavaliereDokument1 Seite00b Cours Perspective CavaliereFabriceNoch keine Bewertungen
- Dess 1 Cours - Modelisation - Des - Liaisons - eDokument7 SeitenDess 1 Cours - Modelisation - Des - Liaisons - eelvis etienneNoch keine Bewertungen
- TD 30 - Représentation D'une Fonction Logique PDFDokument4 SeitenTD 30 - Représentation D'une Fonction Logique PDFbhs channelNoch keine Bewertungen
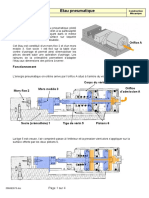
- Etau Orientable PDFDokument6 SeitenEtau Orientable PDFTALMOUDI HEDIANoch keine Bewertungen
- Liaison EncastrementDokument18 SeitenLiaison Encastrementkhocine100% (1)
- B Dessin Technique CorrigéDokument3 SeitenB Dessin Technique CorrigézouhairNoch keine Bewertungen
- P - Etude6 - Les LiaisonsDokument4 SeitenP - Etude6 - Les LiaisonsSamsun GalaxNoch keine Bewertungen
- TD Exercice Systeme de Levage Schema CinématiqueDokument3 SeitenTD Exercice Systeme de Levage Schema CinématiqueYounes KaderNoch keine Bewertungen
- Numeration EleecDokument21 SeitenNumeration EleecSalif NanaNoch keine Bewertungen
- Conception Mécanique - Analyse Structurelle CMDokument22 SeitenConception Mécanique - Analyse Structurelle CMsie Rachid TraoreNoch keine Bewertungen
- DM Quille PendulaireDokument5 SeitenDM Quille PendulaireFilouNoch keine Bewertungen
- Sec Minesponts 2004 Sic PSIDokument12 SeitenSec Minesponts 2004 Sic PSIAlexandre BourrieauNoch keine Bewertungen
- Cours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFDokument17 SeitenCours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFMOHSSINE KOUSSNoch keine Bewertungen
- Devoir de Controle N3-1AS-2014-Blocage Des TubesDokument3 SeitenDevoir de Controle N3-1AS-2014-Blocage Des TubesomatrNoch keine Bewertungen
- Dessin de Construction Mécanique Par M. NGOUPAYEDokument70 SeitenDessin de Construction Mécanique Par M. NGOUPAYEChristian DinhoNoch keine Bewertungen
- Cours Cinematique GraphDokument11 SeitenCours Cinematique GraphEtienne BouronNoch keine Bewertungen
- 1 Dossier TechniqueDokument6 Seiten1 Dossier TechniqueChokri AtefNoch keine Bewertungen
- Fonction Mécanique LiaisonDokument11 SeitenFonction Mécanique LiaisonmoihaNoch keine Bewertungen
- Eval IrmaticDokument4 SeitenEval IrmaticChanol NoupaNoch keine Bewertungen
- Ipeit Ex1 2012Dokument3 SeitenIpeit Ex1 2012JaamesNoch keine Bewertungen
- 208 Prehenseur CorrigeDokument4 Seiten208 Prehenseur CorrigeAhmed TalsiNoch keine Bewertungen
- Chapitre 1 2019 2020Dokument96 SeitenChapitre 1 2019 2020SaidNoch keine Bewertungen
- Chapitre 2 TorseursDokument13 SeitenChapitre 2 TorseursHediFatnassiNoch keine Bewertungen
- Guidage en Rotation CorrDokument9 SeitenGuidage en Rotation CorrrahmaboufalghaNoch keine Bewertungen
- Corrigé Afs2016Dokument6 SeitenCorrigé Afs2016Ibrahim Êl BæzNoch keine Bewertungen
- Fiche PerspectiveDokument4 SeitenFiche Perspectivemohamed fall0% (1)
- ChainesFermees Applications 01Dokument4 SeitenChainesFermees Applications 01Tigma AarousNoch keine Bewertungen
- CH 2 Dessin D'ensemble 2022Dokument4 SeitenCH 2 Dessin D'ensemble 2022Tarek AyariNoch keine Bewertungen
- TP Scie SauteuseDokument5 SeitenTP Scie SauteuseremivsnNoch keine Bewertungen
- Procedes D'asemblageDokument85 SeitenProcedes D'asemblageImed SeghierNoch keine Bewertungen
- Examen A05 SolutionDokument7 SeitenExamen A05 SolutionAbdallah SbaghdiNoch keine Bewertungen
- Ge Esa 2018Dokument16 SeitenGe Esa 2018othmane mrichNoch keine Bewertungen
- Liaisons Mecaniques PDFDokument22 SeitenLiaisons Mecaniques PDFRAMI HELALNoch keine Bewertungen
- Cours 1Dokument13 SeitenCours 1Jonathan BatailleNoch keine Bewertungen
- Guidage en Translation PDFDokument10 SeitenGuidage en Translation PDFAzerty DelegfrNoch keine Bewertungen
- Modelisation Cinematique (Compressé)Dokument31 SeitenModelisation Cinematique (Compressé)Larbi ElbakkaliNoch keine Bewertungen
- Qualif44 N PDFDokument39 SeitenQualif44 N PDFMohamed DahiNoch keine Bewertungen
- Epreuve 1e Seq Mecanique Appliquee TF3Dokument2 SeitenEpreuve 1e Seq Mecanique Appliquee TF3kaka kaladzeNoch keine Bewertungen
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesVon EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNoch keine Bewertungen
- La Mort du roi Tsongor de Laurent Gaudé (Fiche de lecture): Analyse complète et résumé détaillé de l'oeuvreVon EverandLa Mort du roi Tsongor de Laurent Gaudé (Fiche de lecture): Analyse complète et résumé détaillé de l'oeuvreNoch keine Bewertungen
- Modélisation Cinématique Des MécanismesDokument8 SeitenModélisation Cinématique Des MécanismesmounirgemNoch keine Bewertungen
- Liaisons CinématiquesDokument7 SeitenLiaisons Cinématiquesildjs.bjrfgNoch keine Bewertungen
- Intertie Section IIDokument4 SeitenIntertie Section IIFares Feki100% (1)
- TSP JulienJomauxDokument24 SeitenTSP JulienJomauxGuy YgalNoch keine Bewertungen
- (FS01) Intro Aux Liaisons Meca PDFDokument3 Seiten(FS01) Intro Aux Liaisons Meca PDFGuy YgalNoch keine Bewertungen
- Guide Thematique de Gestion D Actifs 2017Dokument36 SeitenGuide Thematique de Gestion D Actifs 2017Guy YgalNoch keine Bewertungen
- RMChap4 (MomentInertie)Dokument21 SeitenRMChap4 (MomentInertie)ammiwesterNoch keine Bewertungen
- 64 Leaflet 55002 2018 FRDokument2 Seiten64 Leaflet 55002 2018 FRGuy YgalNoch keine Bewertungen
- Chap It Re IIIDokument14 SeitenChap It Re IIITedj Amine100% (1)
- Le FrottementDokument12 SeitenLe FrottementGuy YgalNoch keine Bewertungen
- Seminaire FrottementsDokument20 SeitenSeminaire FrottementsfabienNoch keine Bewertungen
- Differentielle Totale ExacteDokument8 SeitenDifferentielle Totale ExacteGuy YgalNoch keine Bewertungen
- I, CDokument17 SeitenI, CAzmi AnassNoch keine Bewertungen
- MetrologieDokument227 SeitenMetrologiemicipsa100% (3)
- Chapitre 1 PDFDokument5 SeitenChapitre 1 PDFAmine OuaredNoch keine Bewertungen
- Climatisation Plusieurs LocauxDokument53 SeitenClimatisation Plusieurs LocauxNorfal McAwsome100% (1)
- Turbines Et CompresseursDokument70 SeitenTurbines Et CompresseursMohamed Amine GharbiNoch keine Bewertungen
- Cours de Cinématique - L1Dokument37 SeitenCours de Cinématique - L1Guy Ygal100% (1)
- Sélection Des Matériaux Par L'ingénieurDokument12 SeitenSélection Des Matériaux Par L'ingénieurGuy YgalNoch keine Bewertungen
- WL 80 100 - 3 FB-11 - 03Dokument114 SeitenWL 80 100 - 3 FB-11 - 03Soufiane BounezraNoch keine Bewertungen
- WL 80 100 - 3 FB-11 - 03Dokument114 SeitenWL 80 100 - 3 FB-11 - 03Soufiane BounezraNoch keine Bewertungen
- Cours de Physique PDFDokument187 SeitenCours de Physique PDFGuy YgalNoch keine Bewertungen
- CM MecaniqueDokument47 SeitenCM MecaniqueAmine FrajNoch keine Bewertungen
- CM MecaniqueDokument47 SeitenCM MecaniqueAmine FrajNoch keine Bewertungen
- Définition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFDokument86 SeitenDéfinition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFGuy Ygal100% (1)
- Cin Et Qu de MVT - 224 - X-2036 PDFDokument71 SeitenCin Et Qu de MVT - 224 - X-2036 PDFGuy YgalNoch keine Bewertungen
- Mecanique GeneraleDokument203 SeitenMecanique Generalemanel_drNoch keine Bewertungen
- Fiche Cinematique Du PointDokument2 SeitenFiche Cinematique Du PointGuy Ygal100% (5)
- La Gestion de Maintenance.1313 PDFDokument97 SeitenLa Gestion de Maintenance.1313 PDFGuy YgalNoch keine Bewertungen
- Initiation SC Ingenieur PDFDokument53 SeitenInitiation SC Ingenieur PDFGuy YgalNoch keine Bewertungen
- La Gestion de Maintenance.1313 PDFDokument97 SeitenLa Gestion de Maintenance.1313 PDFGuy YgalNoch keine Bewertungen
- Enoncé ExamDokument5 SeitenEnoncé ExamAyoubNoch keine Bewertungen
- Spect. Vibr. 1Dokument20 SeitenSpect. Vibr. 1bouchra boudjNoch keine Bewertungen
- EXERCICE 17.3-: Mecanique Du SolideDokument3 SeitenEXERCICE 17.3-: Mecanique Du SolideIngenieur EnsaNoch keine Bewertungen
- Psi Physique CCP 2 2012.enonceDokument14 SeitenPsi Physique CCP 2 2012.enoncePenda NiassNoch keine Bewertungen
- SYS846 Chap2 2 PDFDokument17 SeitenSYS846 Chap2 2 PDFyouceftliNoch keine Bewertungen
- Radier General 03Dokument13 SeitenRadier General 03medsonic005Noch keine Bewertungen
- OMPPBIOFDokument3 SeitenOMPPBIOFYassir Ksakass25% (4)
- Pompes & Garnitures Mécaniques: Etanchéité DynamiqueDokument83 SeitenPompes & Garnitures Mécaniques: Etanchéité DynamiqueYousra AdjeriouNoch keine Bewertungen
- Correction TD2 ElectriciteDokument11 SeitenCorrection TD2 ElectriciteAyoub Brhmmouch100% (1)
- TD Entrainement Des Machines - Point de Fonctionnement - CorrigeDokument3 SeitenTD Entrainement Des Machines - Point de Fonctionnement - CorrigeHadil SellamiNoch keine Bewertungen
- Physique - Collège Vogt - Mini Session - Terminale D Ti - Novembre 2021 - Année Scolaire 2021 - 2022Dokument2 SeitenPhysique - Collège Vogt - Mini Session - Terminale D Ti - Novembre 2021 - Année Scolaire 2021 - 2022Johan MarcNoch keine Bewertungen
- Devoir de BaDokument34 SeitenDevoir de BaCheicknaNoch keine Bewertungen
- TD6 CorrectionDokument1 SeiteTD6 CorrectionAaliyah AndriamanamNoch keine Bewertungen
- Exo 2 IsostatismeDokument12 SeitenExo 2 Isostatismeoumaima ghzNoch keine Bewertungen
- PC Ing150 01 A23Dokument2 SeitenPC Ing150 01 A23Maxence LavigneNoch keine Bewertungen
- Simulation RapideDokument20 SeitenSimulation Rapidejoakim KamgaNoch keine Bewertungen
- 2-2-Action de La NeigeDokument7 Seiten2-2-Action de La NeigeAhmed BougachaNoch keine Bewertungen
- TD4 Meca1 Sigma1 2021Dokument4 SeitenTD4 Meca1 Sigma1 2021blandinette momoNoch keine Bewertungen
- COURS Hydraulique Generale MEPA 2010Dokument85 SeitenCOURS Hydraulique Generale MEPA 2010Bernard Palmer50% (2)
- Emd1 CorrigéDokument7 SeitenEmd1 CorrigéSafah BenNoch keine Bewertungen
- Cahier D'Eleve: 2 AnnéeDokument138 SeitenCahier D'Eleve: 2 AnnéeTEST - TESTNoch keine Bewertungen
- TD N°8 Dynamique: IUT Mesures Physiques 1 Année CaenDokument2 SeitenTD N°8 Dynamique: IUT Mesures Physiques 1 Année CaensidiNoch keine Bewertungen
- CHAPITRE 09 Nervure ReviséDokument7 SeitenCHAPITRE 09 Nervure ReviséRania Ben HassineNoch keine Bewertungen
- Moteur de StirlingDokument2 SeitenMoteur de StirlingRiheb MoncerNoch keine Bewertungen
- Table Thermodynamique R404ADokument4 SeitenTable Thermodynamique R404ASoukaina Jirari100% (1)
- Turbo MachineDokument15 SeitenTurbo MachineHamza BouabdallahNoch keine Bewertungen
- CORRECTION Exercices Emission Perception SonDokument4 SeitenCORRECTION Exercices Emission Perception SonbabouNoch keine Bewertungen
- Surveillances Des MachinesDokument30 SeitenSurveillances Des MachinesLahmarabderrahmaneNoch keine Bewertungen
- Constantes PhysiquesDokument6 SeitenConstantes PhysiquesMahdi ElgolliNoch keine Bewertungen
- Elast EMD2 2003Dokument2 SeitenElast EMD2 2003Ahmed Bel Haj BrahimNoch keine Bewertungen