Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Spline Program Ver 1.1Dokument10 SeitenSpline Program Ver 1.1VivekNoch keine Bewertungen
- Manual - Implement-Hydraulic-System PDFDokument17 SeitenManual - Implement-Hydraulic-System PDFrayendra67% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- SM - VOLVO L50D WHEEL LOADER Service Repair ManualDokument20 SeitenSM - VOLVO L50D WHEEL LOADER Service Repair ManualJulio CesarNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Presentacion 797BDokument133 SeitenPresentacion 797BgustavoNoch keine Bewertungen
- Hydraulic Schematic SymbolsDokument12 SeitenHydraulic Schematic Symbolsraj3885Noch keine Bewertungen
- Vacuum Air BrakeDokument55 SeitenVacuum Air BrakeAnshul Gupta100% (1)
- Hidraulico 563eDokument2 SeitenHidraulico 563eTeofilo Paredes CosmeNoch keine Bewertungen
- FWEFJLNIY4QKLQXDokument13 SeitenFWEFJLNIY4QKLQXSoldan MihaiNoch keine Bewertungen
- FWEFJLNIY4QKLQXDokument13 SeitenFWEFJLNIY4QKLQXSoldan MihaiNoch keine Bewertungen
- Tolerance SheetDokument76 SeitenTolerance SheetprasannaNoch keine Bewertungen
- Tolerance SheetDokument76 SeitenTolerance SheetprasannaNoch keine Bewertungen
- Tolerance SheetDokument76 SeitenTolerance SheetprasannaNoch keine Bewertungen
- Peças 6110 2010Dokument620 SeitenPeças 6110 2010Guilherme CastroNoch keine Bewertungen
- 3 MechanismsDokument35 Seiten3 Mechanismsesham2100% (1)
- YT-2400 Installation EDokument9 SeitenYT-2400 Installation ERakesh Karan SinghNoch keine Bewertungen
- Emp. Hangcha RW 3,0 - 3,5tDokument547 SeitenEmp. Hangcha RW 3,0 - 3,5tfabio kelly Santana100% (1)
- Portafolio Válvulas InduretrosDokument20 SeitenPortafolio Válvulas InduretrosINDURETROS BCNoch keine Bewertungen
- Selector Valve (Steering Mode)Dokument3 SeitenSelector Valve (Steering Mode)AndresApazaAlvarezNoch keine Bewertungen
- Yoga - A Tool To Reveal The Self: Yoga: Holistic Solution For Disease Prevention and Stress ManagementDokument24 SeitenYoga - A Tool To Reveal The Self: Yoga: Holistic Solution For Disease Prevention and Stress ManagementprasannaNoch keine Bewertungen
- BOMDokument1 SeiteBOMprasannaNoch keine Bewertungen
- Lec38 PDFDokument16 SeitenLec38 PDFprasannaNoch keine Bewertungen
- T & C For GB Simulation PDFDokument21 SeitenT & C For GB Simulation PDFprasannaNoch keine Bewertungen
- Book 1Dokument3 SeitenBook 1prasannaNoch keine Bewertungen
- MC SimulationDokument39 SeitenMC SimulationAkshay GatkalNoch keine Bewertungen
- Fabrication ItemsDokument2 SeitenFabrication ItemsprasannaNoch keine Bewertungen
- Involute Spline Design: - Tyson Baker F'01Dokument2 SeitenInvolute Spline Design: - Tyson Baker F'01iobb222Noch keine Bewertungen
- Gear InspectionDokument4 SeitenGear Inspectionbrpnaidu2157Noch keine Bewertungen
- In Planetary Gears: Lo, Adiidistri'Bluti, OnDokument4 SeitenIn Planetary Gears: Lo, Adiidistri'Bluti, OnprasannaNoch keine Bewertungen
- Gear InspectionDokument4 SeitenGear Inspectionbrpnaidu2157Noch keine Bewertungen
- Iso Tolerances For HolesDokument3 SeitenIso Tolerances For HolesprasannaNoch keine Bewertungen
- Dddinterference in Internal GearingDokument10 SeitenDddinterference in Internal GearingprasannaNoch keine Bewertungen
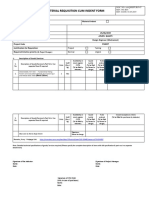
- Material Requisition Cum Indent FormDokument2 SeitenMaterial Requisition Cum Indent FormprasannaNoch keine Bewertungen
- Table For Gear DrawingDokument1 SeiteTable For Gear DrawingprasannaNoch keine Bewertungen
- Dddinterference in Internal GearingDokument10 SeitenDddinterference in Internal GearingprasannaNoch keine Bewertungen
- T M B D Z M: Pitting StrengthDokument6 SeitenT M B D Z M: Pitting StrengthprasannaNoch keine Bewertungen
- Expense Report: Aadyah Aerospace 0000010Dokument1 SeiteExpense Report: Aadyah Aerospace 0000010prasannaNoch keine Bewertungen
- Gear Calculations Rev3Dokument5 SeitenGear Calculations Rev3ghostghost123Noch keine Bewertungen
- Internal Circlips-IsDokument5 SeitenInternal Circlips-IsPRASHANTHNoch keine Bewertungen
- Self Aligning Journal Bearing PDFDokument10 SeitenSelf Aligning Journal Bearing PDFprasannaNoch keine Bewertungen
- Internal Circlips-IsDokument5 SeitenInternal Circlips-IsPRASHANTHNoch keine Bewertungen
- Spur Gears-Backlash Undercut FormulasDokument1 SeiteSpur Gears-Backlash Undercut FormulasrfgrgNoch keine Bewertungen
- Review of Retarder Used As Braking System in Heavy Vehicles: ArticleDokument6 SeitenReview of Retarder Used As Braking System in Heavy Vehicles: ArticlebhupeshNoch keine Bewertungen
- E 350 12 PDFDokument28 SeitenE 350 12 PDFHamdi NaufelNoch keine Bewertungen
- MMPDTPRE54Dokument82 SeitenMMPDTPRE54Paul BreitnerNoch keine Bewertungen
- Brake SystemDokument81 SeitenBrake SystemRie ReiNoch keine Bewertungen
- Maintenance Presentation On PumpDokument35 SeitenMaintenance Presentation On PumpVAN VIET NGONoch keine Bewertungen
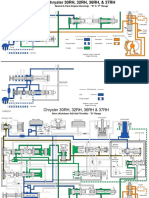
- 30RH - 32RH - 36RH e 37RHDokument10 Seiten30RH - 32RH - 36RH e 37RHFabricio LimaNoch keine Bewertungen
- Parts Manual Mitsubishi MG730 98160 93910Dokument306 SeitenParts Manual Mitsubishi MG730 98160 93910ezeizabarrenaNoch keine Bewertungen
- Technical Service Information: Automatic Transmission Service GroupDokument4 SeitenTechnical Service Information: Automatic Transmission Service GroupByung C KimNoch keine Bewertungen
- Automobile Engineering Unit IiDokument61 SeitenAutomobile Engineering Unit IiRavindra_120267% (3)
- Piping Class - AR20Dokument2 SeitenPiping Class - AR20Дмитрий РыбаковNoch keine Bewertungen
- Hydraulics & Pneumatics Chapter 1: Hydraulics (Hydraulic Components)Dokument16 SeitenHydraulics & Pneumatics Chapter 1: Hydraulics (Hydraulic Components)gkhnNoch keine Bewertungen
- ZF 5HP24A: (AUDI & VW) Code: 1058 020 XXX 5 SPEED 4WD (Full Electronic Control)Dokument6 SeitenZF 5HP24A: (AUDI & VW) Code: 1058 020 XXX 5 SPEED 4WD (Full Electronic Control)JOSE ELIAS ALCANTARANoch keine Bewertungen
- position detectors阀门限位开关 crouzetDokument8 Seitenposition detectors阀门限位开关 crouzetLouise JohnyNoch keine Bewertungen
- Centrifugal Pump Basics: Terms Commonly Used in The Pumping IndustryDokument18 SeitenCentrifugal Pump Basics: Terms Commonly Used in The Pumping IndustryBhuneshwar ChelakNoch keine Bewertungen
- ABSDokument6 SeitenABSLinh Pham HoangNoch keine Bewertungen
- Invoice PDFDokument1 SeiteInvoice PDFRavi Sankara ReddyNoch keine Bewertungen
- FP3.0 INT TablerosDokument24 SeitenFP3.0 INT TablerossueNoch keine Bewertungen