Das könnte Ihnen auch gefallen
- Case Study In OOAD and UML: Case Studies in Software Architecture & Design, #1Von EverandCase Study In OOAD and UML: Case Studies in Software Architecture & Design, #1Noch keine Bewertungen
- Unit-Iv: 4.1 System Architecture: Satellite-Based NavigationDokument27 SeitenUnit-Iv: 4.1 System Architecture: Satellite-Based NavigationAli Jama100% (1)
- OOAD Unit 5 - Traffic Management SystemDokument20 SeitenOOAD Unit 5 - Traffic Management Systemlilooooooooooo100% (2)
- Case Study On Traffic Management SystemDokument35 SeitenCase Study On Traffic Management SystemSuraj Brijwani60% (5)
- Day 4 Five Attributes of A Complex SystemDokument10 SeitenDay 4 Five Attributes of A Complex SystemPuneeth nallandula100% (1)
- 8-Benefits and Risks of Object Oriented Development-16-Dec-2019Material - I - 16-Dec-2019 - 7 - The - Benefits - of - Object-Oriented - DevelopmentDokument7 Seiten8-Benefits and Risks of Object Oriented Development-16-Dec-2019Material - I - 16-Dec-2019 - 7 - The - Benefits - of - Object-Oriented - DevelopmentAkshat GuptaNoch keine Bewertungen
- OOAD Unit Wise Imp QuestionsDokument2 SeitenOOAD Unit Wise Imp QuestionsbalakailasaNoch keine Bewertungen
- VIVA Questions forOOADDokument10 SeitenVIVA Questions forOOADAbirami Thangavel83% (6)
- Weak Slot & Filler Structure Chap 9Dokument17 SeitenWeak Slot & Filler Structure Chap 9Nitesh Mishra83% (18)
- Third Year Sixth Semester CS6601 Distributed System 2 Mark With AnswerDokument25 SeitenThird Year Sixth Semester CS6601 Distributed System 2 Mark With AnswerPRIYA RAJI86% (7)
- Chatroom Using Python Project ReportDokument3 SeitenChatroom Using Python Project ReportAyush Kagane100% (2)
- Lifecycle Expectations - Software Project ManagementDokument2 SeitenLifecycle Expectations - Software Project ManagementRiyaz Shaik100% (1)
- Module 3 Uid 15CS832Dokument77 SeitenModule 3 Uid 15CS832M.A raja100% (1)
- System Testing and ImplementationDokument7 SeitenSystem Testing and Implementationkhattak123456100% (7)
- 3-1 Policies and MechanismsDokument2 Seiten3-1 Policies and MechanismsJathin DarsiNoch keine Bewertungen
- Online Search AgentsDokument13 SeitenOnline Search AgentsHari Deivasigamani100% (1)
- Web - Technology (Questions & Answers For Lab Viva)Dokument18 SeitenWeb - Technology (Questions & Answers For Lab Viva)Tejaswi Maligireddy67% (3)
- Unit-5 CCDokument22 SeitenUnit-5 CCSonga Sowjanya100% (4)
- Gram Panchayat ProjectDokument67 SeitenGram Panchayat ProjectPrasad Prasad77% (13)
- ch-11 Interfaces, Types and RolesDokument14 Seitench-11 Interfaces, Types and Rolesbhargavi0% (1)
- UNIT3Dokument63 SeitenUNIT3orangesareamazing46Noch keine Bewertungen
- DYNAMIC SORTING ALGORITHM VISUALIZER USING OPENGL ReportDokument35 SeitenDYNAMIC SORTING ALGORITHM VISUALIZER USING OPENGL ReportSneha Sivakumar88% (8)
- Uml For Campus Recruitment SystemDokument15 SeitenUml For Campus Recruitment SystemRass Seyoum50% (2)
- Simulation of Rocket CG Project Using OpenGL ReportDokument36 SeitenSimulation of Rocket CG Project Using OpenGL Report2K18CO037 AkashChahar100% (3)
- Ss Lab Viva QuestionsDokument3 SeitenSs Lab Viva QuestionsCharlie Choco67% (3)
- Se Viva Practical Viva Questions For Software EngineeringDokument10 SeitenSe Viva Practical Viva Questions For Software EngineeringAbhijeet Malabade100% (2)
- Cricket Score Board AbstractDokument2 SeitenCricket Score Board AbstractIndra Jeet33% (3)
- Dbms Enforcing Integrity ConstraintsDokument11 SeitenDbms Enforcing Integrity ConstraintsSAHANA50% (6)
- DBMS Viva Questions MCA IdolDokument14 SeitenDBMS Viva Questions MCA IdolUnknown100% (9)
- Design Issues of An OSDokument10 SeitenDesign Issues of An OSNitin SainiNoch keine Bewertungen
- Cloud Computing Important QuestionsDokument4 SeitenCloud Computing Important QuestionsShilpa KodatiNoch keine Bewertungen
- Traffic Management SystemDokument9 SeitenTraffic Management SystemNareshNoch keine Bewertungen
- DATABASE MANAGEMENT SYSTEMS Unit Wise Important Questions: PART - A (Short Answer Questions)Dokument7 SeitenDATABASE MANAGEMENT SYSTEMS Unit Wise Important Questions: PART - A (Short Answer Questions)Purushothama ReddyNoch keine Bewertungen
- Railway Reservation SystemDokument53 SeitenRailway Reservation SystemJennifer Peter53% (19)
- CN Lab Viva QuestionsDokument4 SeitenCN Lab Viva QuestionsChetan Raj100% (1)
- HCI - Visually Pleasing CompositionDokument32 SeitenHCI - Visually Pleasing CompositionAnik60% (5)
- Passport Automation SystemDokument9 SeitenPassport Automation SystemSaiNoch keine Bewertungen
- OS Viva Expected QuestionsDokument7 SeitenOS Viva Expected Questionsaamer_shahbaazNoch keine Bewertungen
- CG Viva+questions+&ANSWERSDokument13 SeitenCG Viva+questions+&ANSWERSJinsKJoy75% (4)
- Synopsis of E-LearningDokument5 SeitenSynopsis of E-LearningSachin Verma100% (5)
- Online Course Reservation SystemDokument56 SeitenOnline Course Reservation SystemAisha Saran80% (5)
- TAXONOMY OF VIRTUALIZATION TECHNIQUES - by ArmanDokument5 SeitenTAXONOMY OF VIRTUALIZATION TECHNIQUES - by Armanarman khan100% (7)
- SPPM Unit 1 NotesDokument45 SeitenSPPM Unit 1 Notestejaswini73% (22)
- Fee Management System - SRSDokument13 SeitenFee Management System - SRSKshitij Minocha75% (4)
- ST Module 1 NotesDokument44 SeitenST Module 1 NotesYashaswini100% (2)
- Campus Recruitment System - Mini Project ReportDokument17 SeitenCampus Recruitment System - Mini Project Reportvenkateshwara pNoch keine Bewertungen
- Ooad MCQ PDFDokument85 SeitenOoad MCQ PDFVjay Narain100% (4)
- Internal Mark Management SystemDokument56 SeitenInternal Mark Management SystemJohn Son88% (8)
- Library Management SystemDokument16 SeitenLibrary Management SystemGanesh Nawle83% (6)
- Railway Ticket Reservation System Project ReportDokument9 SeitenRailway Ticket Reservation System Project Reportb2uty77_593619754Noch keine Bewertungen
- ST Module - 5Dokument53 SeitenST Module - 5Dbit DocsNoch keine Bewertungen
- 1.3 Perspective and Specialized ProcessDokument49 Seiten1.3 Perspective and Specialized ProcessMohamed BilalNoch keine Bewertungen
- College Notes GalleryDokument34 SeitenCollege Notes Gallery1HK16CS104 Muntazir Hussain Bhat100% (4)
- Online Bus Booking System PDFDokument69 SeitenOnline Bus Booking System PDFArslan Syed90% (10)
- Software Engineering 2 Mark Questions PDFDokument10 SeitenSoftware Engineering 2 Mark Questions PDFMunisekar67% (3)
- Software Engineering ASSIGNMENT QUESTIONDokument5 SeitenSoftware Engineering ASSIGNMENT QUESTIONAkshatha ShettyNoch keine Bewertungen
- Object Oriented DesignDokument37 SeitenObject Oriented DesignGanesh ThapaNoch keine Bewertungen
- The Major Elements of System DesignDokument38 SeitenThe Major Elements of System DesignLeela PradeepNoch keine Bewertungen
- MC0071 Software EngineeringDokument30 SeitenMC0071 Software Engineeringpampawan2Noch keine Bewertungen
- System Architecture For Wireless Based NetworksDokument32 SeitenSystem Architecture For Wireless Based NetworksVenu MadhavNoch keine Bewertungen
- Omtd S A0001030604 1Dokument4 SeitenOmtd S A0001030604 1Tom TomNoch keine Bewertungen
- Automatic Inspection of Defects, Uneven Surfaces, and ContaminationDokument20 SeitenAutomatic Inspection of Defects, Uneven Surfaces, and ContaminationSanti Diaz MonteroNoch keine Bewertungen
- Module 4: Physical Layer: Introduction To Networks v7.0 (ITN)Dokument42 SeitenModule 4: Physical Layer: Introduction To Networks v7.0 (ITN)Nguyễn Thị Thùy LinhNoch keine Bewertungen
- Ap Controller (Capsman)Dokument20 SeitenAp Controller (Capsman)Raul Cespedes IchazoNoch keine Bewertungen
- Power Monitor (R3) - Data - Sheet - V1Dokument2 SeitenPower Monitor (R3) - Data - Sheet - V1prekNoch keine Bewertungen
- One Manual P1 8-2Dokument62 SeitenOne Manual P1 8-2Bebliuc AlexNoch keine Bewertungen
- Features: Subordinate New BrandDokument6 SeitenFeatures: Subordinate New BrandIleanaNoch keine Bewertungen
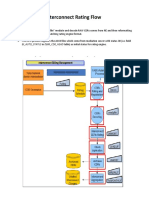
- Interconnect Rating FlowDokument5 SeitenInterconnect Rating FlowShahzad AlviNoch keine Bewertungen
- TopFlite Components - Tinel - Lock® RingDokument1 SeiteTopFlite Components - Tinel - Lock® Ringbruce774Noch keine Bewertungen
- ThesisDokument34 SeitenThesisMary Ann Cadena CabañasNoch keine Bewertungen
- A CD 2206Dokument20 SeitenA CD 2206MUHAMMAD SISWANTORONoch keine Bewertungen
- Compal Confidential: Vsjev MT8317 LA-A031PDokument22 SeitenCompal Confidential: Vsjev MT8317 LA-A031PRiza Virsada100% (1)
- Secure Coding in C and CDokument133 SeitenSecure Coding in C and Clist_courseNoch keine Bewertungen
- Common Clock (SRAN16.1 02)Dokument83 SeitenCommon Clock (SRAN16.1 02)VVL0% (1)
- EENY Training - Technician - FiberDokument16 SeitenEENY Training - Technician - FiberPaul CunninghamNoch keine Bewertungen
- CH1 Module1 DiodesDokument54 SeitenCH1 Module1 DiodesParidhi kothariNoch keine Bewertungen
- User Guide: Mk5 Gateway Module As Profibus InterfaceDokument27 SeitenUser Guide: Mk5 Gateway Module As Profibus InterfaceErnesto Sta AnaNoch keine Bewertungen
- Computer Networking ProjectDokument2 SeitenComputer Networking ProjectWub TeferaNoch keine Bewertungen
- Automatic Rain Sensor Alarm-2Dokument13 SeitenAutomatic Rain Sensor Alarm-218-410 K.CharanNoch keine Bewertungen
- Chapter 8. Switched-Inductor Supplies With Design Insight and Intuition (Power IC Design)Dokument29 SeitenChapter 8. Switched-Inductor Supplies With Design Insight and Intuition (Power IC Design)Minh Hai RungNoch keine Bewertungen
- RLU Report Layout UtilityDokument8 SeitenRLU Report Layout UtilityVISHNU400100% (1)
- DNS Rebinding Attack LabDokument7 SeitenDNS Rebinding Attack LabTty SmithNoch keine Bewertungen
- 1 - The SIMATIC S7 System FamilyDokument36 Seiten1 - The SIMATIC S7 System FamilyMichele BacocchiaNoch keine Bewertungen
- 12 Task Performance 1final Exam ARG TANTAYDokument4 Seiten12 Task Performance 1final Exam ARG TANTAYJerick SolimanNoch keine Bewertungen
- AntarVis User Manual V1 3 3Dokument74 SeitenAntarVis User Manual V1 3 3Edgar CamposNoch keine Bewertungen
- AV Receiver: Owner'S Manual Manual de InstruccionesDokument430 SeitenAV Receiver: Owner'S Manual Manual de InstruccionesSebas SinNoch keine Bewertungen
- EchoLife EG8145V5 Datasheet 04Dokument3 SeitenEchoLife EG8145V5 Datasheet 04javier berengueNoch keine Bewertungen
- Lte High Capacity Event ParametersDokument30 SeitenLte High Capacity Event ParametersFestian Dika100% (1)
- Intro To Computing I 2Dokument33 SeitenIntro To Computing I 2Havy TjNoch keine Bewertungen
- EE 351 Spring 2021 Homework 6 SolutionsDokument21 SeitenEE 351 Spring 2021 Homework 6 SolutionsKalenNoch keine Bewertungen