Das könnte Ihnen auch gefallen
- Compensación en Serie Línea de TransmisiónDokument29 SeitenCompensación en Serie Línea de TransmisiónBrow Wamir CharlNoch keine Bewertungen
- Solucionario de HartDokument22 SeitenSolucionario de HartCarlos Meza100% (3)
- Sintonización PSSDokument12 SeitenSintonización PSSDavid Ricardo VallejoNoch keine Bewertungen
- Proyecto FotovoltaicoDokument55 SeitenProyecto FotovoltaicoSteven Gregorio Pluas Cullizpuma100% (1)
- Protocolo de Pruebas de Los Generadores S Ncronos 1 PDFDokument64 SeitenProtocolo de Pruebas de Los Generadores S Ncronos 1 PDFJunior YanaNoch keine Bewertungen
- Productos Mantenimiento Diaz PDFDokument18 SeitenProductos Mantenimiento Diaz PDFRuben MantillaNoch keine Bewertungen
- Desarmado y Armado - 400Dokument108 SeitenDesarmado y Armado - 400royert80Noch keine Bewertungen
- Paper - Etapas de Una Fuente de Voltaje ReguladaDokument5 SeitenPaper - Etapas de Una Fuente de Voltaje ReguladaCalvin LeonardNoch keine Bewertungen
- Ejercicios 6Dokument81 SeitenEjercicios 6Fabricio SanchezNoch keine Bewertungen
- Maquinas Electricas IEEEDokument7 SeitenMaquinas Electricas IEEESantiago MéndezNoch keine Bewertungen
- Paneles Solares CaserosDokument6 SeitenPaneles Solares CaserosElvia Barrios100% (1)
- Cómo Instalar Una Bomba para AguaDokument7 SeitenCómo Instalar Una Bomba para AguaArevalo Dhe75% (4)
- Frecuencia y Reguladores de VoltajeDokument6 SeitenFrecuencia y Reguladores de Voltajepegasus1989Noch keine Bewertungen
- Generador ItaipuDokument12 SeitenGenerador ItaipuluisNoch keine Bewertungen
- Ensayo de La Excitatriz en Los GeneradoresDokument5 SeitenEnsayo de La Excitatriz en Los Generadoresedison cangoNoch keine Bewertungen
- Sistema de Excitación de La Máquina SincrónicaDokument18 SeitenSistema de Excitación de La Máquina SincrónicaEduardo Sarria SuazoNoch keine Bewertungen
- Visio - Vehiculos Hibrido Serie, Paralelo, MixtoDokument2 SeitenVisio - Vehiculos Hibrido Serie, Paralelo, MixtoDavid Tipan0% (1)
- Monografia Reguladores de VoltajeDokument6 SeitenMonografia Reguladores de VoltajeGari1961100% (1)
- Informe Estabilidad de Sistemas de PotenciaDokument5 SeitenInforme Estabilidad de Sistemas de PotenciaBryan VarelaNoch keine Bewertungen
- Esta Bili DadDokument89 SeitenEsta Bili DadMartinNoch keine Bewertungen
- FactsDokument11 SeitenFactsnetrakidNoch keine Bewertungen
- Práctica 7: "Relevador 87 (Diferencial) "Dokument5 SeitenPráctica 7: "Relevador 87 (Diferencial) "Diego ZayasNoch keine Bewertungen
- Interarmónicas Distorsion Forma de Onda AlbaDokument10 SeitenInterarmónicas Distorsion Forma de Onda AlbaalizethssaNoch keine Bewertungen
- Informe Motor Monofasico Con Capacitor IDokument8 SeitenInforme Motor Monofasico Con Capacitor IJhon ReinosoNoch keine Bewertungen
- Caracteristicatica Externa de La Maquina SincronicaDokument12 SeitenCaracteristicatica Externa de La Maquina SincronicaJuanJavierFloresFernandez50% (2)
- LAB3 - Escalar Señales Analógicas - Logo8Dokument7 SeitenLAB3 - Escalar Señales Analógicas - Logo8Julio Pino MirandaNoch keine Bewertungen
- 33 - Relevadores de Porcentaje DiferencialDokument9 Seiten33 - Relevadores de Porcentaje Diferencialhakashu100% (2)
- Ejercicios UNIDAD IDokument2 SeitenEjercicios UNIDAD IeltevilleNoch keine Bewertungen
- Sistemas de Potencia Tarea 4 PDFDokument3 SeitenSistemas de Potencia Tarea 4 PDFGabrielleNoch keine Bewertungen
- 02 - Arranque de Motores 3FDokument19 Seiten02 - Arranque de Motores 3FjuanNoch keine Bewertungen
- Principios de Funcionamiento Del Regulador Del Voltaje KCR 760Dokument10 SeitenPrincipios de Funcionamiento Del Regulador Del Voltaje KCR 760Karel GómezNoch keine Bewertungen
- Variadores de FrecuenciaDokument17 SeitenVariadores de FrecuenciaJohanna Tigasi100% (1)
- Libro Guia Circuitos 2Dokument370 SeitenLibro Guia Circuitos 2MaritoNoch keine Bewertungen
- Informe #2 Ensayo en Carga Del Transformador, Luis Rodriguez Ci 28479444Dokument7 SeitenInforme #2 Ensayo en Carga Del Transformador, Luis Rodriguez Ci 28479444Luis Manuel RodriguezNoch keine Bewertungen
- Marcha en Paralelo de AlternadoresDokument18 SeitenMarcha en Paralelo de AlternadoresEdward OrcconNoch keine Bewertungen
- Motor ImpulsionDokument13 SeitenMotor ImpulsionLuis ChacónNoch keine Bewertungen
- Practica #5Dokument5 SeitenPractica #5Rafael Ramirez100% (1)
- Tesis en SincronizacionDokument131 SeitenTesis en SincronizacionjuanNoch keine Bewertungen
- Manual de Operación de Relé de SincronismoDokument4 SeitenManual de Operación de Relé de SincronismoDanny ChachaNoch keine Bewertungen
- 14 Sistemas de ExcitatrizDokument23 Seiten14 Sistemas de ExcitatrizFebrina Ron DelgadoNoch keine Bewertungen
- Curva de Capabilidad y Generador Con Cargas Resistivas Capacitivas e InductivasDokument15 SeitenCurva de Capabilidad y Generador Con Cargas Resistivas Capacitivas e InductivasJhim J. MoaNoch keine Bewertungen
- Exitatriz Del Generador AsincronoDokument9 SeitenExitatriz Del Generador AsincronoХуан ЛуисNoch keine Bewertungen
- Construcciòn de Una Matriz de Admitancia en SepDokument13 SeitenConstrucciòn de Una Matriz de Admitancia en SepMaxwell DSNoch keine Bewertungen
- Característica Motor DCDokument5 SeitenCaracterística Motor DCSergioAugustoBaldeonNoch keine Bewertungen
- Criterio de Areas Iguales PDFDokument0 SeitenCriterio de Areas Iguales PDFArturo MartinezNoch keine Bewertungen
- Protección de GeneradoresDokument12 SeitenProtección de GeneradoresAndrés Herrera RestrepoNoch keine Bewertungen
- Carga Atrapada y Tensión Inducida de Líneas ParalelasDokument5 SeitenCarga Atrapada y Tensión Inducida de Líneas ParalelasMarcos Daniel RuizNoch keine Bewertungen
- Tipo de TiristoresDokument7 SeitenTipo de TiristoresMartin Gonzales100% (1)
- Gobernador en Un Generador de PotenciaDokument10 SeitenGobernador en Un Generador de PotenciaJonathan AparicioNoch keine Bewertungen
- Porcentaje Diferencial Con Restriccion ArmonicaDokument9 SeitenPorcentaje Diferencial Con Restriccion ArmonicaMario DelgadoNoch keine Bewertungen
- Impedancia en Líneas de Transmisión TrifásicasDokument5 SeitenImpedancia en Líneas de Transmisión TrifásicasNoe Marchan100% (1)
- Proteccion de Transdormadores de PotenciaDokument16 SeitenProteccion de Transdormadores de PotenciaLuis Cabrera PalaciosNoch keine Bewertungen
- Regulador de VoltajeDokument12 SeitenRegulador de VoltajeFeer Moreno LopezNoch keine Bewertungen
- Control de Fase Con PWM para Un TiristorDokument5 SeitenControl de Fase Con PWM para Un TiristorOscar Fernando Bernal Lopez100% (2)
- Sincronismo Con SCRDokument5 SeitenSincronismo Con SCRJuan Camilo SepulvedaNoch keine Bewertungen
- Arrancadores EstáticosDokument16 SeitenArrancadores EstáticoscelenyNoch keine Bewertungen
- Control de TensionesDokument3 SeitenControl de TensionesJeff Torres Caro100% (1)
- Taller Final Alex BadilloDokument9 SeitenTaller Final Alex BadilloAlex Badillo100% (1)
- Laboratorio # 5 - Control de Temperatura en Una CalderaDokument7 SeitenLaboratorio # 5 - Control de Temperatura en Una CalderaHubert Maraza JaliriNoch keine Bewertungen
- AVR y RASDokument12 SeitenAVR y RASjasobpqNoch keine Bewertungen
- Trabajo Accionamientos - Cicloconvertidor MonofásicoDokument16 SeitenTrabajo Accionamientos - Cicloconvertidor MonofásicoRamon Zo Za100% (1)
- Practica 4 Con Simulador EMSDokument10 SeitenPractica 4 Con Simulador EMSjhonatanNoch keine Bewertungen
- Control P-FDokument13 SeitenControl P-FLuysyñño ChNoch keine Bewertungen
- Subestaciones, Ing. Luis TapiaDokument141 SeitenSubestaciones, Ing. Luis TapiaWilliamFernando100% (3)
- Generacion Sincrona y AsincronaDokument18 SeitenGeneracion Sincrona y AsincronaYosef HanderssonNoch keine Bewertungen
- Examen de Maquinas 2 Preguntas TeoricasDokument2 SeitenExamen de Maquinas 2 Preguntas TeoricasAnonymous gIfXPkiL9S100% (1)
- Informe N 05 Máquina SíncronaDokument20 SeitenInforme N 05 Máquina SíncronaNeyserBurgaMarin100% (1)
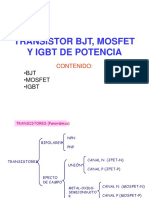
- Transistor BJT, Mosfet y Igbt de PotenciaDokument22 SeitenTransistor BJT, Mosfet y Igbt de PotenciaAndrésEduardoMartinezNoch keine Bewertungen
- Transformadores de Tres DevanadosDokument11 SeitenTransformadores de Tres DevanadosSamuel DelgadoNoch keine Bewertungen
- Estabilidad Permanente TemasDokument3 SeitenEstabilidad Permanente TemasCarlos MezaNoch keine Bewertungen
- Hoja CuadDokument1 SeiteHoja CuadCarlos MezaNoch keine Bewertungen
- CuestionariosDokument3 SeitenCuestionariosCarlos MezaNoch keine Bewertungen
- Metodo Punto Por Punto (Para El AnálisisDokument5 SeitenMetodo Punto Por Punto (Para El AnálisisCarlos MezaNoch keine Bewertungen
- Apuntes NivelacionDokument33 SeitenApuntes NivelacionJonathan Moedano GarnicaNoch keine Bewertungen
- Controlador de VelocidadDokument112 SeitenControlador de VelocidadHernán Llatas HuamaníNoch keine Bewertungen
- OCTAVADokument30 SeitenOCTAVACaty Olazo ArceNoch keine Bewertungen
- Desn Iive Laci OnDokument33 SeitenDesn Iive Laci OnCarlos MezaNoch keine Bewertungen
- Tema 6 - IE. Maquinas ElectricasDokument21 SeitenTema 6 - IE. Maquinas ElectricasJordy Bryan Saccsa RodriguezNoch keine Bewertungen
- Ampliacion Planta Trermoelectrica Entrerios SETARDokument2 SeitenAmpliacion Planta Trermoelectrica Entrerios SETARelvis69727Noch keine Bewertungen
- Cap07 EsquemaDokument24 SeitenCap07 EsquemaCésar SantanaNoch keine Bewertungen
- MetNumTema4Teo (09 10)Dokument10 SeitenMetNumTema4Teo (09 10)Lesly AbigailNoch keine Bewertungen
- Criterios de Áreas IgualesDokument39 SeitenCriterios de Áreas IgualesCarlos MezaNoch keine Bewertungen
- Metod PDFDokument2 SeitenMetod PDFAlan Pablo HuimanNoch keine Bewertungen
- Metod PDFDokument2 SeitenMetod PDFAlan Pablo HuimanNoch keine Bewertungen
- MASKANA Si7285Dokument16 SeitenMASKANA Si7285SchirNoch keine Bewertungen
- Estabilidad de Sistemas de PotenciaDokument56 SeitenEstabilidad de Sistemas de PotenciaCarlos MezaNoch keine Bewertungen
- MASKANA Si7285Dokument16 SeitenMASKANA Si7285SchirNoch keine Bewertungen
- Clonacion de SIMS by LUKDokument8 SeitenClonacion de SIMS by LUKFranciscodlxNoch keine Bewertungen
- Ampliacion Planta Trermoelectrica Entrerios SETARDokument1 SeiteAmpliacion Planta Trermoelectrica Entrerios SETARCarlos MezaNoch keine Bewertungen
- Examen 2° Parcial ADokument2 SeitenExamen 2° Parcial ARomeo MagañaNoch keine Bewertungen
- Performance Victory 15w40 (Es)Dokument2 SeitenPerformance Victory 15w40 (Es)Pancho CamposNoch keine Bewertungen
- Gestion Generacion Transmision y Distribucion de Energia ElectricaDokument10 SeitenGestion Generacion Transmision y Distribucion de Energia ElectricaJuan VelascoNoch keine Bewertungen
- Manual de Instalacion RoberShawDokument15 SeitenManual de Instalacion RoberShawPedro TorresNoch keine Bewertungen
- Formato Plan de Accion EGP Tablero para Instalaciones Eléctricas Provisionales de HerramientasDokument3 SeitenFormato Plan de Accion EGP Tablero para Instalaciones Eléctricas Provisionales de HerramientasWladimir RodríguezNoch keine Bewertungen
- AEROGENERADORESDokument6 SeitenAEROGENERADORESEduardo BritoNoch keine Bewertungen
- Informe Proyecto Final Q-100Dokument19 SeitenInforme Proyecto Final Q-100EdwinEstivenson Paz SanchezNoch keine Bewertungen
- Soldadura Autogena (Oxiacetilenica) Normas Preventivas y RiesgosDokument11 SeitenSoldadura Autogena (Oxiacetilenica) Normas Preventivas y RiesgosRocío Lazo100% (1)
- Ap TurboDokument11 SeitenAp TurboTeofilo Paredes CosmeNoch keine Bewertungen
- Marco Teorico de La Practica No.4Dokument22 SeitenMarco Teorico de La Practica No.4Jonathan Ixba MartinezNoch keine Bewertungen
- 1 Ejercicio 1Dokument15 Seiten1 Ejercicio 1Francisco RamosNoch keine Bewertungen
- NZZ009Dokument5 SeitenNZZ009lamisma09Noch keine Bewertungen
- Matriz Folleto Web2Dokument40 SeitenMatriz Folleto Web2BraniTisocNoch keine Bewertungen
- Cómo Consultar Tu Consumo Horario de Electricidad Gratis - NergizaDokument10 SeitenCómo Consultar Tu Consumo Horario de Electricidad Gratis - NergizarrfermatorNoch keine Bewertungen
- 1 Vivanco - VJ PDFDokument325 Seiten1 Vivanco - VJ PDFjose rojas100% (1)
- M - CM y CMX - Caldera EléctricaDokument32 SeitenM - CM y CMX - Caldera EléctricaCOINSERNoch keine Bewertungen
- Dispositivos de Protección y ManiobraDokument9 SeitenDispositivos de Protección y ManiobraSalazar MiguelNoch keine Bewertungen
- Res 376-05 Tasa Cero BombillosDokument5 SeitenRes 376-05 Tasa Cero BombillosNormativaRDNoch keine Bewertungen
- ASG-OD-004 Sistemas de Puesta Tierra - 2006Dokument4 SeitenASG-OD-004 Sistemas de Puesta Tierra - 2006AnthonnyNoch keine Bewertungen
- Eco PanelesDokument22 SeitenEco PanelesFrancisco Mendoza FernandezNoch keine Bewertungen
- SEMANADokument6 SeitenSEMANAhaldy aguirre100% (1)
- Caso Práctico 1Dokument2 SeitenCaso Práctico 1Pablo ZaldivarNoch keine Bewertungen