Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- REMOTE POSITION INDICATING SYSTEM sw1Dokument5 SeitenREMOTE POSITION INDICATING SYSTEM sw1Joshua Serna Sanchez II0% (1)
- Obtan Stat Ep: 12tkejted EDokument6 SeitenObtan Stat Ep: 12tkejted EViha NaikNoch keine Bewertungen
- Instructions and Process For How To Apply 1Dokument21 SeitenInstructions and Process For How To Apply 1Viha NaikNoch keine Bewertungen
- The Maharaja Sayajirao University of Baroda: Fatehgunj, Vadodara - 390 002, Gujarat, INDIADokument1 SeiteThe Maharaja Sayajirao University of Baroda: Fatehgunj, Vadodara - 390 002, Gujarat, INDIAViha NaikNoch keine Bewertungen
- U) Ac 1gna) %os RSPH: JnhalDokument21 SeitenU) Ac 1gna) %os RSPH: JnhalViha NaikNoch keine Bewertungen
- The Admission Committee For Professional CoursesDokument1 SeiteThe Admission Committee For Professional CoursesViha NaikNoch keine Bewertungen
- MPH Vacant R3 PDFDokument1 SeiteMPH Vacant R3 PDFViha NaikNoch keine Bewertungen
- GTU 10th Annual Convocation Advt - 763842Dokument1 SeiteGTU 10th Annual Convocation Advt - 763842Viha NaikNoch keine Bewertungen
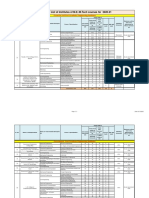
- Provisional List of Institutes of M.E./M.Tech Courses For 2020-21Dokument11 SeitenProvisional List of Institutes of M.E./M.Tech Courses For 2020-21Viha NaikNoch keine Bewertungen
- Software Toolkit: MATLABDokument15 SeitenSoftware Toolkit: MATLABViha NaikNoch keine Bewertungen
- Institute Name Course Name Category Subcat Board Name Opening Rank Closing Rank Gate StatusDokument3 SeitenInstitute Name Course Name Category Subcat Board Name Opening Rank Closing Rank Gate StatusViha NaikNoch keine Bewertungen
- Exp No: 10 Aim: To Study Top Five Switchgear Failure Causes and How To Avoid ThemDokument2 SeitenExp No: 10 Aim: To Study Top Five Switchgear Failure Causes and How To Avoid ThemViha NaikNoch keine Bewertungen
- Admission Committee For Professional Courses (Acpc) : Institute Name Course Name VacantDokument1 SeiteAdmission Committee For Professional Courses (Acpc) : Institute Name Course Name VacantViha NaikNoch keine Bewertungen
- M Tech Solar Energy BrochureDokument1 SeiteM Tech Solar Energy BrochureViha NaikNoch keine Bewertungen
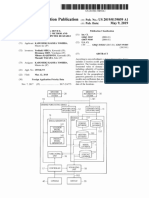
- Patent Application Publication (10) Pub - No .: US 2019 / 0139059 A1Dokument34 SeitenPatent Application Publication (10) Pub - No .: US 2019 / 0139059 A1Viha NaikNoch keine Bewertungen
- PSOC Blackout PDFDokument5 SeitenPSOC Blackout PDFViha NaikNoch keine Bewertungen
- Exp. No: 9 Aim: To Study The Recent Development of Circuit Breaker 1) Sulphur Hexafluoride (SF6) Circuit BreakerDokument4 SeitenExp. No: 9 Aim: To Study The Recent Development of Circuit Breaker 1) Sulphur Hexafluoride (SF6) Circuit BreakerViha NaikNoch keine Bewertungen
- Practical No:8 Aim: Design A Permanent Magnet Using FEMM SoftwareDokument5 SeitenPractical No:8 Aim: Design A Permanent Magnet Using FEMM SoftwareViha NaikNoch keine Bewertungen
- Report Activities (Hawassa Textile SC) Week 1: Nov/09-11/2016 Weekdays ActivitiesDokument4 SeitenReport Activities (Hawassa Textile SC) Week 1: Nov/09-11/2016 Weekdays ActivitiestesfuNoch keine Bewertungen
- TNB Electricity System - Tenaga Nasional BerhadDokument2 SeitenTNB Electricity System - Tenaga Nasional BerhadNor IdayuNoch keine Bewertungen
- General - Purpose - Solenoid - Valves - Cat - fcdfl0911 - Coil Reference-1Dokument36 SeitenGeneral - Purpose - Solenoid - Valves - Cat - fcdfl0911 - Coil Reference-1muhammad ridoNoch keine Bewertungen
- How To Apply For Elect ConnDokument127 SeitenHow To Apply For Elect ConnmonologyNoch keine Bewertungen
- MP-3000 Motor Protection RelayDokument104 SeitenMP-3000 Motor Protection RelayBolivar MartinezNoch keine Bewertungen
- Ripple FactorDokument4 SeitenRipple FactorRohit SinghNoch keine Bewertungen
- 1MRK514001-BEN en Relay Mounting Systems COMBIFLEX PDFDokument8 Seiten1MRK514001-BEN en Relay Mounting Systems COMBIFLEX PDFInsan AzizNoch keine Bewertungen
- Genset/Load Requirements For October 2021 Major SDM Blackout ActivityDokument2 SeitenGenset/Load Requirements For October 2021 Major SDM Blackout Activityrica magsinoNoch keine Bewertungen
- Vector Group of Transformer - Electrical Notes & ArticlesDokument22 SeitenVector Group of Transformer - Electrical Notes & ArticlesManoj Kumar PadmanabanNoch keine Bewertungen
- Alternators: Electrical-Energy GenerationDokument11 SeitenAlternators: Electrical-Energy GenerationPragg AggarwalNoch keine Bewertungen
- Chapter 3 Voltage ControlDokument33 SeitenChapter 3 Voltage ControlNaveen Reddy100% (2)
- Tanesco Tanzania - Specification S24 MV Load Break Fuse Cutouts With Arc Chutes (2000)Dokument42 SeitenTanesco Tanzania - Specification S24 MV Load Break Fuse Cutouts With Arc Chutes (2000)Anonymous AoUv7Gz100% (1)
- Electrical Safety Policy ChecklistDokument2 SeitenElectrical Safety Policy ChecklistSugun Kumar PedapudiNoch keine Bewertungen
- Classification of Tidal Power PlantDokument2 SeitenClassification of Tidal Power PlantCovyn YongNoch keine Bewertungen
- Broken Delta - Voltage DisturbanceDokument7 SeitenBroken Delta - Voltage DisturbancerajshahieeeNoch keine Bewertungen
- Motores Panasonic PDFDokument293 SeitenMotores Panasonic PDFMarlon MorelNoch keine Bewertungen
- EResearch1A 20 Patents Capili Figueroa Mallari PDFDokument68 SeitenEResearch1A 20 Patents Capili Figueroa Mallari PDFKenneth Paul Dela CruzNoch keine Bewertungen
- Distance Protection Ingepac Ef ZT User Manual PDF FreeDokument532 SeitenDistance Protection Ingepac Ef ZT User Manual PDF FreeFelipe Mafioletti SchuartzNoch keine Bewertungen
- Kompressory Peremennogo Toka Secop DanfossDokument6 SeitenKompressory Peremennogo Toka Secop Danfosssidahmed latsameniaNoch keine Bewertungen
- 30 Erz C32ek271yDokument6 Seiten30 Erz C32ek271yoliver bienNoch keine Bewertungen
- Electrolytic Capacitor ExplanationDokument2 SeitenElectrolytic Capacitor Explanationempeeno1Noch keine Bewertungen
- U 5 - Electrical SystemsDokument16 SeitenU 5 - Electrical SystemsLe Dinh DuyNoch keine Bewertungen
- Revised Schematic (C) Copyright 1994-2004 PDFDokument1 SeiteRevised Schematic (C) Copyright 1994-2004 PDFAlex CardenasNoch keine Bewertungen
- Operating Manual For MV Indoor-Outdoor SwitchgearsDokument380 SeitenOperating Manual For MV Indoor-Outdoor SwitchgearsHilmy Awad50% (2)
- Forms & Types of LV PanelsDokument7 SeitenForms & Types of LV PanelsZaferullah KhanNoch keine Bewertungen
- Gasturbine Sgt5 8000h BrochureDokument16 SeitenGasturbine Sgt5 8000h BrochuretitlesaengNoch keine Bewertungen
- Word Bank:: Making A CircuitDokument9 SeitenWord Bank:: Making A CircuitahkiaenaaaaNoch keine Bewertungen
- r7210405 Electrical TechnologyDokument4 Seitenr7210405 Electrical TechnologysivabharathamurthyNoch keine Bewertungen