Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
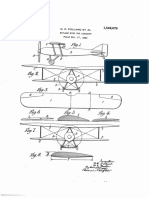
- H. P. Folland Et All: Biplane Wing For AircraftDokument3 SeitenH. P. Folland Et All: Biplane Wing For AircraftAbdul Rashid TajarNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Incorporating Handling Qualities Analysis Into Rotorcraft Conceptual DesignDokument23 SeitenIncorporating Handling Qualities Analysis Into Rotorcraft Conceptual DesignAbdul Rashid TajarNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Developing Modified ADS-33D Helicopter Maneuvers For The Shipboar PDFDokument62 SeitenDeveloping Modified ADS-33D Helicopter Maneuvers For The Shipboar PDFAbdul Rashid TajarNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Pilot's Assessment of Helicopter Handling-Quality Factors Common To Both Agility and Instrument Flying TasksDokument21 SeitenA Pilot's Assessment of Helicopter Handling-Quality Factors Common To Both Agility and Instrument Flying TasksAbdul Rashid TajarNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- 1984 9648 Jatm 8 3 0289 PDFDokument18 Seiten1984 9648 Jatm 8 3 0289 PDFAbdul Rashid TajarNoch keine Bewertungen
- A Rotorcraft Conceptual Design Tool For Handling Qualities EvaluationDokument10 SeitenA Rotorcraft Conceptual Design Tool For Handling Qualities EvaluationAbdul Rashid TajarNoch keine Bewertungen
- Handling Qualities Optimization For Rotorcraft Conceptual DesignDokument24 SeitenHandling Qualities Optimization For Rotorcraft Conceptual DesignAbdul Rashid TajarNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Carbon Steel Fittings DimensionsDokument3 SeitenCarbon Steel Fittings DimensionsgiorselNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Scorpio PDFDokument3 SeitenScorpio PDFnimi2364010Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Standard Safety Practices Manual PDFDokument350 SeitenStandard Safety Practices Manual PDFsithulibraNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Previous Years Questions (2020-1983) Segment-Wise: Ordinary Differential EquationsDokument16 SeitenPrevious Years Questions (2020-1983) Segment-Wise: Ordinary Differential EquationsAniket bhaiNoch keine Bewertungen
- Whitepaper - Loadspreading and SeafasteningDokument3 SeitenWhitepaper - Loadspreading and SeafasteningtyuNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- 8484.sensor CEM Diagnostic Tests User Manual v3.1.0Dokument28 Seiten8484.sensor CEM Diagnostic Tests User Manual v3.1.0Edgar FuentesNoch keine Bewertungen
- Provisional Restorations in Fixed ProsthodonticsDokument4 SeitenProvisional Restorations in Fixed ProsthodonticsPhoebe David100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- André Bakker Modeling Flow Fields in Stirred TanksDokument40 SeitenAndré Bakker Modeling Flow Fields in Stirred TanksKhalida BekrentchirNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Raw Material Chemical AnalysisDokument41 SeitenRaw Material Chemical AnalysisVinod Kumar VermaNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- International SubcontractingDokument2 SeitenInternational SubcontractingCatherine JohnsonNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Origami - Playing CardsDokument6 SeitenOrigami - Playing Cardsapi-3709851Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Defeat Cancer NaturallyDokument94 SeitenDefeat Cancer NaturallyRknuviprasys Low100% (3)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Properties of Equality PDFDokument1 SeiteProperties of Equality PDFR. I. P.Noch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Derivation of Gravity Loads PDFDokument4 SeitenDerivation of Gravity Loads PDFHenry TuganoNoch keine Bewertungen
- Practice 4Dokument11 SeitenPractice 4Justine Rs Dela TorreNoch keine Bewertungen
- Atomic Structure RevisionDokument4 SeitenAtomic Structure RevisioncvNoch keine Bewertungen
- PDF 1sz Fe Workshop Manual - CompressDokument2 SeitenPDF 1sz Fe Workshop Manual - CompressJose Luis Apaza Machaca75% (4)
- Grundfosliterature SP A - SP LDokument104 SeitenGrundfosliterature SP A - SP LRizalino BrazilNoch keine Bewertungen
- "Automatic Tyre Pressure Inflation System": Bachelor of TechnologyDokument41 Seiten"Automatic Tyre Pressure Inflation System": Bachelor of Technologymd washiqeNoch keine Bewertungen
- Transes - Male & Female GenitaliaDokument10 SeitenTranses - Male & Female GenitaliacamatoviancaNoch keine Bewertungen
- Module I: Introduction To Environmental PollutionDokument14 SeitenModule I: Introduction To Environmental PollutionAman John TuduNoch keine Bewertungen
- Aldehyde Keto. Ncert Book PDFDokument32 SeitenAldehyde Keto. Ncert Book PDFAshraf KhanNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Agriculture Budget 2013-14Dokument33 SeitenAgriculture Budget 2013-14Ajay LimbasiyaNoch keine Bewertungen
- Essential Oil ExtractionDokument159 SeitenEssential Oil ExtractionAubrey Hernandez100% (4)
- Digital DividesDokument25 SeitenDigital DividesKumaraswamy ChannabasaiahNoch keine Bewertungen
- Chm130 Test Batch-2Dokument3 SeitenChm130 Test Batch-2misakisuki7Noch keine Bewertungen
- Research Article: International Research Journal of PharmacyDokument5 SeitenResearch Article: International Research Journal of PharmacyAlfrets Marade SianiparNoch keine Bewertungen
- HVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004Dokument4 SeitenHVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004leivajNoch keine Bewertungen
- The Proof of Agricultural ZakatDokument7 SeitenThe Proof of Agricultural ZakatDila Estu KinasihNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)