Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Project Report Face Detection and RecognitionDokument38 SeitenProject Report Face Detection and RecognitionDhruv Goel75% (8)
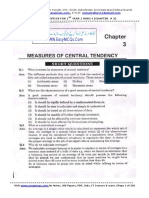
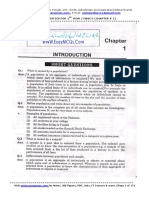
- Basic Statistics Notes for 1st Year HSSCDokument39 SeitenBasic Statistics Notes for 1st Year HSSCHoney BunnyNoch keine Bewertungen
- Numerical Methods On Finding The RootsDokument26 SeitenNumerical Methods On Finding The RootsRobby Andre ChingNoch keine Bewertungen
- Finite Element Analysis of 2D Truss StructuresDokument9 SeitenFinite Element Analysis of 2D Truss StructuresYam Balaoing100% (1)
- DSD Practice ExamDokument1 SeiteDSD Practice Exammtkhusro92Noch keine Bewertungen
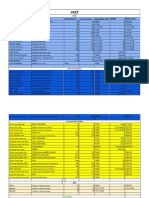
- Jazz PrepaidDokument4 SeitenJazz PrepaidHoney BunnyNoch keine Bewertungen
- Jazz PrepaidDokument4 SeitenJazz PrepaidHoney BunnyNoch keine Bewertungen
- Computer Science Paper Scheme (Marks Distribution)Dokument4 SeitenComputer Science Paper Scheme (Marks Distribution)Honey BunnyNoch keine Bewertungen
- 9th Test Planning 2019Dokument1 Seite9th Test Planning 2019Honey BunnyNoch keine Bewertungen
- CS201 Assignment No 3 Solution Fall 2019-2020 (WWW - Virtualstudysolutions.blogspot - Com)Dokument7 SeitenCS201 Assignment No 3 Solution Fall 2019-2020 (WWW - Virtualstudysolutions.blogspot - Com)Honey BunnyNoch keine Bewertungen
- 3000Dokument163 Seiten3000Ahmed KhanNoch keine Bewertungen
- 1st Year Computer Science Paper Scheme Chapter-Wise BreakdownDokument4 Seiten1st Year Computer Science Paper Scheme Chapter-Wise BreakdownHoney BunnyNoch keine Bewertungen
- Basic Statistics Notes for 1st Year HSSCDokument58 SeitenBasic Statistics Notes for 1st Year HSSCHoney Bunny100% (1)
- Statistic NotesDokument17 SeitenStatistic NotesHoney BunnyNoch keine Bewertungen
- Numerical Analysis (Mth603)Dokument2 SeitenNumerical Analysis (Mth603)Honey BunnyNoch keine Bewertungen
- MTH603 Final Term (GIGA FILE by Ishfaq V11.02.02) 2 PDFDokument171 SeitenMTH603 Final Term (GIGA FILE by Ishfaq V11.02.02) 2 PDFbc170401540 MUHAMMAD SHAHIDNoch keine Bewertungen
- Hazrat Salman Farsi (R.a) Ka Hadayat Ki Janb SafarDokument181 SeitenHazrat Salman Farsi (R.a) Ka Hadayat Ki Janb SafarHoney BunnyNoch keine Bewertungen
- Bachon K Islami NaamDokument352 SeitenBachon K Islami NaamHoney BunnyNoch keine Bewertungen
- 11th English Book-1 S.qsDokument9 Seiten11th English Book-1 S.qsFarman AliNoch keine Bewertungen
- Rules For Housing SocityDokument1 SeiteRules For Housing SocityHoney BunnyNoch keine Bewertungen
- Pressure CookerDokument10 SeitenPressure CookerHoney BunnyNoch keine Bewertungen
- Ch13 - NLP, DP, GP2005Dokument76 SeitenCh13 - NLP, DP, GP2005Sonya DewiNoch keine Bewertungen
- Introduction To Deep LearningDokument49 SeitenIntroduction To Deep LearningLuv ChawdaNoch keine Bewertungen
- Tuning of PID Controller Using Conventional and Meta-Heuristic Technique For AVR SystemDokument4 SeitenTuning of PID Controller Using Conventional and Meta-Heuristic Technique For AVR Systemrathorsumit2006Noch keine Bewertungen
- Percentage Points - Solutions PDFDokument4 SeitenPercentage Points - Solutions PDFwolfretonmathsNoch keine Bewertungen
- NLP NctuDokument19 SeitenNLP NctularasmoyoNoch keine Bewertungen
- MA201 Lecture19 HandoutDokument24 SeitenMA201 Lecture19 Handoutvasu sainNoch keine Bewertungen
- 3408-Data StructureDokument3 Seiten3408-Data StructurecomtotapelNoch keine Bewertungen
- Lab ManualDokument24 SeitenLab ManualPATIL AKASH100% (1)
- Stack, Queue and Heap Data Structures Intermediate Level QuestionsDokument6 SeitenStack, Queue and Heap Data Structures Intermediate Level QuestionsAnonymous GeekNoch keine Bewertungen
- Q2 - G8 MathDokument11 SeitenQ2 - G8 MathJiryl AlpuertoNoch keine Bewertungen
- ME CFD SyllabusDokument2 SeitenME CFD SyllabusMoses DevaprasannaNoch keine Bewertungen
- Module 4 Network Analysis 01Dokument10 SeitenModule 4 Network Analysis 01Akshay AkshayNoch keine Bewertungen
- Slide Case EDM03 - Group 3Dokument59 SeitenSlide Case EDM03 - Group 3Dandza PradityaNoch keine Bewertungen
- Learn Cryptography Methods Like Substitution Ciphers and XOR EncryptionDokument23 SeitenLearn Cryptography Methods Like Substitution Ciphers and XOR EncryptionAnnarathna ANoch keine Bewertungen
- Reporting Uncertainty: Dr. C. H. Meyers, Reporting On His Measurements of The Heat Capacity of AmmoniaDokument2 SeitenReporting Uncertainty: Dr. C. H. Meyers, Reporting On His Measurements of The Heat Capacity of AmmoniaKalidasNoch keine Bewertungen
- Experiment 2: Aim: To Implement and Analyze Merge Sort Algorithm. TheoryDokument5 SeitenExperiment 2: Aim: To Implement and Analyze Merge Sort Algorithm. Theorydeepinder singhNoch keine Bewertungen
- Ly and Nguyen (2020) ICSCDokument4 SeitenLy and Nguyen (2020) ICSCapostolos katsafadosNoch keine Bewertungen
- Identifying Visible & Hidden Edges of SolidsDokument2 SeitenIdentifying Visible & Hidden Edges of SolidsChacko JacobNoch keine Bewertungen
- Group 3 (Seksyen4)Dokument15 SeitenGroup 3 (Seksyen4)alnzNoch keine Bewertungen
- TMSCryptography PackDokument82 SeitenTMSCryptography PackVagelisBekyrosNoch keine Bewertungen
- Machine Learning Algorithms For Opinion Mining and Sentiment ClassificationDokument6 SeitenMachine Learning Algorithms For Opinion Mining and Sentiment ClassificationsenthilnathanNoch keine Bewertungen
- Panel GuidelinesDokument3 SeitenPanel GuidelinesPatofnaPatofnicNoch keine Bewertungen
- HW6Dokument4 SeitenHW6callum174753Noch keine Bewertungen
- The Birthday ProblemDokument4 SeitenThe Birthday ProblemParam SaxenaNoch keine Bewertungen
- Generative Semi-Supervised Learning For Multivariate Time Series ImputationDokument9 SeitenGenerative Semi-Supervised Learning For Multivariate Time Series ImputationmahdiyedadiyanNoch keine Bewertungen