Das könnte Ihnen auch gefallen
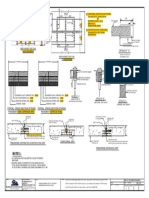
- PQC - Typical Details of Rigid Pavement Drawing - 22!03!2021-ModelDokument1 SeitePQC - Typical Details of Rigid Pavement Drawing - 22!03!2021-ModelLalit Choudhary100% (1)
- Face Detection and Recognition on Mobile DevicesVon EverandFace Detection and Recognition on Mobile DevicesBewertung: 1 von 5 Sternen1/5 (1)
- Porsche - US Cayman-R - 2011 PDFDokument24 SeitenPorsche - US Cayman-R - 2011 PDFSculatorNoch keine Bewertungen
- CNT 0010071 01 PDFDokument18 SeitenCNT 0010071 01 PDFMartinLuk86% (7)
- How Autonomous Vehicles WorkDokument7 SeitenHow Autonomous Vehicles WorkJeremy HorneNoch keine Bewertungen
- 25977-Automobile Sensors May Usher in Self Driving Cars PDFDokument6 Seiten25977-Automobile Sensors May Usher in Self Driving Cars PDFSandrawarman BalasundramNoch keine Bewertungen
- B3 G1 AimlDokument27 SeitenB3 G1 Aimldihosid99100% (1)
- PreviewpdfDokument205 SeitenPreviewpdfAlex JuniorNoch keine Bewertungen
- Venkata Sasidhar Pendyala 7th AprilDokument2 SeitenVenkata Sasidhar Pendyala 7th AprilSasi DharNoch keine Bewertungen
- Engine Technology International - Hot Vee - June 2017Dokument128 SeitenEngine Technology International - Hot Vee - June 2017Junior Augusto100% (1)
- TCRP RPT 114Dokument86 SeitenTCRP RPT 114steeven77Noch keine Bewertungen
- Self Driving CarDokument61 SeitenSelf Driving Carimmi1989Noch keine Bewertungen
- Autonomous Vehicles: What Wikipedia Cannot Tell You About Autonomous Vehicles?Von EverandAutonomous Vehicles: What Wikipedia Cannot Tell You About Autonomous Vehicles?Noch keine Bewertungen
- Rao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of CarsDokument9 SeitenRao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of Carsapi-19799369100% (1)
- Willock Ante Litem 4.11.23Dokument19 SeitenWillock Ante Litem 4.11.23Allie GoolrickNoch keine Bewertungen
- Use of ICT in Automobile IndustryDokument3 SeitenUse of ICT in Automobile IndustryPasan De Silva100% (2)
- Literarure - Study Bus TerminusDokument21 SeitenLiterarure - Study Bus Terminuspalani80% (5)
- Technological Advancement of Automotive IndustryDokument6 SeitenTechnological Advancement of Automotive IndustryaspectNoch keine Bewertungen
- Project Progress and Action ItemsDokument4 SeitenProject Progress and Action ItemsUpali KarunarathneNoch keine Bewertungen
- Autonomous Cars - Recent DevelopmentDokument7 SeitenAutonomous Cars - Recent DevelopmentpittysNoch keine Bewertungen
- Self-driving cars advantages disadvantagesDokument2 SeitenSelf-driving cars advantages disadvantagesAndreea DianaNoch keine Bewertungen
- Self-Driving Vehicles FinalDokument15 SeitenSelf-Driving Vehicles Finalapi-510165927Noch keine Bewertungen
- Design of an IoT based autonomous vehicle with computer visionDokument2 SeitenDesign of an IoT based autonomous vehicle with computer visionSashant kapoorNoch keine Bewertungen
- Internet of Vehicles and Autonomous Connected Car - Privacy and Security IssuesDokument9 SeitenInternet of Vehicles and Autonomous Connected Car - Privacy and Security IssuesMahmoudi ChairaNoch keine Bewertungen
- Case 5Dokument3 SeitenCase 5AbduNoch keine Bewertungen
- Autonomous Car Self Driving Cars UploadDokument20 SeitenAutonomous Car Self Driving Cars UploadJake SmithNoch keine Bewertungen
- Autonomous Car Self Driving CarsDokument19 SeitenAutonomous Car Self Driving Carsamanshahwaz023Noch keine Bewertungen
- Ux and CX For AutonomousDokument6 SeitenUx and CX For AutonomousMichael kiioNoch keine Bewertungen
- Self Driving Car Using Aurdin and Rasberry PiDokument6 SeitenSelf Driving Car Using Aurdin and Rasberry PiSahana GuddadNoch keine Bewertungen
- Dc-656837-V1-Torts of The Future Autonomous EmailableDokument20 SeitenDc-656837-V1-Torts of The Future Autonomous EmailablejulianNoch keine Bewertungen
- Autonomous Vehicles: Challenges and Advancements in AI-Based Navigation SystemsDokument12 SeitenAutonomous Vehicles: Challenges and Advancements in AI-Based Navigation SystemsInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Group 10: Presented byDokument25 SeitenGroup 10: Presented byTayyab DilsahadNoch keine Bewertungen
- Paper 1 MlisDokument19 SeitenPaper 1 MlisDhruv SoniNoch keine Bewertungen
- Autonomus Vehicle Original 2Dokument9 SeitenAutonomus Vehicle Original 2Vaibhav ThakareNoch keine Bewertungen
- Self Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningDokument8 SeitenSelf Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningKrishna KrishNoch keine Bewertungen
- Icipr2021 05Dokument4 SeitenIcipr2021 05VINCENT KIOKONoch keine Bewertungen
- 6 ReportDokument10 Seiten6 ReportRakshita Rajan singhNoch keine Bewertungen
- Autonomous Cars 2014 JounalDokument4 SeitenAutonomous Cars 2014 JounalmichaelNoch keine Bewertungen
- Ram TPPDokument11 SeitenRam TPPJogu PavankalyanNoch keine Bewertungen
- Self Driving Cars: SeminarDokument17 SeitenSelf Driving Cars: SeminarBhawini RajNoch keine Bewertungen
- ARTIFICIAL INTELLIGENCE Self Driving Cars-HassaanDokument11 SeitenARTIFICIAL INTELLIGENCE Self Driving Cars-Hassaanhassaan.6402Noch keine Bewertungen
- Aguila JImenez Mario ProjectoDokument18 SeitenAguila JImenez Mario ProjectoMARIO ANTONIO AGUILA JIMENEZNoch keine Bewertungen
- Data Driverless car-DNL-PC2021Dokument3 SeitenData Driverless car-DNL-PC2021Antoine PoufNoch keine Bewertungen
- IoT Case Study: Autonomous VehiclesDokument3 SeitenIoT Case Study: Autonomous VehiclesLinus KullmanNoch keine Bewertungen
- Seminar Project Report ON Trends in Automobile IndustryDokument28 SeitenSeminar Project Report ON Trends in Automobile Industrygsrawat123Noch keine Bewertungen
- Deep Learning Autonomous VehicleDokument11 SeitenDeep Learning Autonomous VehicleSalman MNoch keine Bewertungen
- Autonomous Car Self Driving Cars UploadDokument19 SeitenAutonomous Car Self Driving Cars UploadRohan RahalkarNoch keine Bewertungen
- MockcongressresearchpaperDokument8 SeitenMockcongressresearchpaperapi-336458686Noch keine Bewertungen
- Sensor and Object Recognition Technologies For Self-Driving CarsDokument9 SeitenSensor and Object Recognition Technologies For Self-Driving CarsIsmael MoraesNoch keine Bewertungen
- Vehicular Communication Networks inDokument16 SeitenVehicular Communication Networks inromoNoch keine Bewertungen
- SeminarDokument17 SeitenSeminarRuthwiK GoUdNoch keine Bewertungen
- Miniature Model of Autonomous Vehicle Using Arduino UNO and Open CVDokument14 SeitenMiniature Model of Autonomous Vehicle Using Arduino UNO and Open CVIJRASETPublicationsNoch keine Bewertungen
- 18AUP109L-Project: Autonomous DriveDokument8 Seiten18AUP109L-Project: Autonomous DriveSatvik JohariNoch keine Bewertungen
- Autonomous driving technology future aspectsDokument13 SeitenAutonomous driving technology future aspectsJari AbbasNoch keine Bewertungen
- Self-Driving Cars May Reduce Accidents and Increase MobilityDokument5 SeitenSelf-Driving Cars May Reduce Accidents and Increase MobilityJhanavi ReddyNoch keine Bewertungen
- English PresentationDokument5 SeitenEnglish PresentationCleopas KaboreNoch keine Bewertungen
- Driverless Vehicles: Innovation, Enterprises, and Society - Group 3Dokument31 SeitenDriverless Vehicles: Innovation, Enterprises, and Society - Group 3Tu Nhi PhamNoch keine Bewertungen
- EMBEDDED SYSTEMS AUTONOMOUS CARDokument9 SeitenEMBEDDED SYSTEMS AUTONOMOUS CARgauravkmeenNoch keine Bewertungen
- Achieving Complete Autonomy in Self-Driving VehiclesDokument6 SeitenAchieving Complete Autonomy in Self-Driving VehiclesSammit NadkarniNoch keine Bewertungen
- Infrared Technology and Applications To Autonomous/Self Vehicles, A Global Session in Infrared Technology and Application ConferenceDokument6 SeitenInfrared Technology and Applications To Autonomous/Self Vehicles, A Global Session in Infrared Technology and Application ConferenceAndrei BotNoch keine Bewertungen
- Sovereign Car Sleep Prevention Car: Shreya Sule, Kritak Gupta, Viraj DesaiDokument4 SeitenSovereign Car Sleep Prevention Car: Shreya Sule, Kritak Gupta, Viraj DesaiBoga SandhyaNoch keine Bewertungen
- How Smart Cars Are Benefiting from IoTDokument13 SeitenHow Smart Cars Are Benefiting from IoTJuan Francisco Pulido CarrilloNoch keine Bewertungen
- Saint Louis University School of Engineering and Architecture Department of Electrical EngineeringDokument12 SeitenSaint Louis University School of Engineering and Architecture Department of Electrical EngineeringMr. WftyNoch keine Bewertungen
- Shaping the Future of Transportation with AutomationDokument8 SeitenShaping the Future of Transportation with AutomationInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Implications and Decision-Making Algorithms For AVsDokument5 SeitenImplications and Decision-Making Algorithms For AVsJames MainaNoch keine Bewertungen
- A Survey of The State-of-the-Art Localization Techniques and Their Potentials For Autonomous Vehicle ApplicationsDokument18 SeitenA Survey of The State-of-the-Art Localization Techniques and Their Potentials For Autonomous Vehicle Applicationsdan_intel6735Noch keine Bewertungen
- Embedded Systems and Control in Automation of Cars: Presented ByDokument13 SeitenEmbedded Systems and Control in Automation of Cars: Presented ByPeringanji SudheerNoch keine Bewertungen
- A Review Paper On Development of E-VehiclesDokument6 SeitenA Review Paper On Development of E-VehiclesIJRASETPublicationsNoch keine Bewertungen
- Debate Over Developing Driverless CarsDokument6 SeitenDebate Over Developing Driverless CarsJarar AleeNoch keine Bewertungen
- Using Smartphones To Detect Car Accidents and Provide Situational Awareness To Emergency RespondersDokument14 SeitenUsing Smartphones To Detect Car Accidents and Provide Situational Awareness To Emergency RespondersSanthana KrishnanNoch keine Bewertungen
- 2Dokument8 Seiten2Abdullah KhanNoch keine Bewertungen
- TTE4XXX Traffic Engineering Syllabus 12-4-11Dokument2 SeitenTTE4XXX Traffic Engineering Syllabus 12-4-11Sofiene GuedriNoch keine Bewertungen
- CE 5004 Highway and Traffic EngineeringDokument3 SeitenCE 5004 Highway and Traffic Engineeringalfaiz078Noch keine Bewertungen
- Mscthesis AmirAlJawahiri 4225074Dokument86 SeitenMscthesis AmirAlJawahiri 4225074Veerabhadrayya KatapurmathNoch keine Bewertungen
- 1-26-1971 Interdiction at Ban Bak 19 Dec 70 To 5 Jan 71Dokument58 Seiten1-26-1971 Interdiction at Ban Bak 19 Dec 70 To 5 Jan 71Robert Vale100% (1)
- Express Domestic Shipment from Mexico City to ZapopanDokument2 SeitenExpress Domestic Shipment from Mexico City to ZapopanRamón ArellanoNoch keine Bewertungen
- VisakhapatnamDokument4 SeitenVisakhapatnamSaptadityaNoch keine Bewertungen
- TUGAS Highway Engineering Muhamad Farhan Santoso 2502059751Dokument1 SeiteTUGAS Highway Engineering Muhamad Farhan Santoso 2502059751Muhamad Farhan SantosoNoch keine Bewertungen
- DSM Complete Manual - Rev. No. 124 - 2023-04-03Dokument415 SeitenDSM Complete Manual - Rev. No. 124 - 2023-04-03Muhammad UmarNoch keine Bewertungen
- Copy For Kind Perusal To:: SMEC International Pty. LTDDokument3 SeitenCopy For Kind Perusal To:: SMEC International Pty. LTDMohd UmarNoch keine Bewertungen
- Azzurro Aug PetroserveDokument1 SeiteAzzurro Aug PetroserveKalpesh MistryNoch keine Bewertungen
- Motion of Vehicles & Engines ExplainedDokument9 SeitenMotion of Vehicles & Engines ExplainedPusat Tuisyen Celik JayaNoch keine Bewertungen
- Abacus PharmaDokument33 SeitenAbacus PharmaMijin Ko0% (1)
- Sustainability 02 00252Dokument14 SeitenSustainability 02 00252Jan Karina Lapeña PadlaNoch keine Bewertungen
- Jurnal Penelitian Transportasi DaratDokument10 SeitenJurnal Penelitian Transportasi DaratDwisuryo Karisma MontolNoch keine Bewertungen
- Pondicherry TourismDokument47 SeitenPondicherry Tourismfriend_foru2121100% (1)
- FinalReport - Bridge ProjectDokument302 SeitenFinalReport - Bridge ProjectMohamed GamalNoch keine Bewertungen
- Strategic Marketing Planning VOLVO: Ali AbdurahimanDokument14 SeitenStrategic Marketing Planning VOLVO: Ali AbdurahimanAli Abdurahiman100% (1)
- Session 05 - Bridge Loading - Applications Part 2Dokument76 SeitenSession 05 - Bridge Loading - Applications Part 2Isuru Mahesh BandaraNoch keine Bewertungen
- Brosjyre Upcoming Projects PDFDokument15 SeitenBrosjyre Upcoming Projects PDFDiego García VaqueroNoch keine Bewertungen