Das könnte Ihnen auch gefallen
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsVon EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNoch keine Bewertungen
- Electrical Modeling and Simulation of Industrial Power System With Matlab/Simulink ProgramDokument7 SeitenElectrical Modeling and Simulation of Industrial Power System With Matlab/Simulink ProgramJinesh RNoch keine Bewertungen
- MATLAB Apps Estimate Harmonic AmplificationDokument61 SeitenMATLAB Apps Estimate Harmonic AmplificationRamon GutierrezNoch keine Bewertungen
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsVon EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNoch keine Bewertungen
- Transformer Tests Using MATLAB/Simulink and Their Integration Into Undergraduate Electric Machinery CoursesDokument9 SeitenTransformer Tests Using MATLAB/Simulink and Their Integration Into Undergraduate Electric Machinery CoursesRagu Raman100% (1)
- Computer Methods in Power Systems Analysis with MATLABVon EverandComputer Methods in Power Systems Analysis with MATLABNoch keine Bewertungen
- 42AW Conference PaperDokument7 Seiten42AW Conference Paperrudreshsj86Noch keine Bewertungen
- Notes of ElectricalDokument8 SeitenNotes of ElectricalKarthik SDNoch keine Bewertungen
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen
- PS-II Manual PDFDokument42 SeitenPS-II Manual PDFVinamra GovilNoch keine Bewertungen
- PowerFactory Applications for Power System AnalysisVon EverandPowerFactory Applications for Power System AnalysisFrancisco M. Gonzalez-LongattNoch keine Bewertungen
- Optimization of Distributed Generation Capacity For Line Loss Reduction and VoltageDokument9 SeitenOptimization of Distributed Generation Capacity For Line Loss Reduction and VoltageCandra SaigustiaNoch keine Bewertungen
- Ijeet 09 04 002 PDFDokument15 SeitenIjeet 09 04 002 PDFveljal6317Noch keine Bewertungen
- S. Narayanamoorthy, H.A. Moghaddam, Z. Liu, T. Park, N.S. Kim, InIEEE Transactions On VeryLarge Scale Integration (VLSI) Systems23 (6), 1180 (2015)Dokument5 SeitenS. Narayanamoorthy, H.A. Moghaddam, Z. Liu, T. Park, N.S. Kim, InIEEE Transactions On VeryLarge Scale Integration (VLSI) Systems23 (6), 1180 (2015)VipinNoch keine Bewertungen
- Matsim: A Matpower and Simulink Based Tool For Power System Dynamics Course EducationDokument6 SeitenMatsim: A Matpower and Simulink Based Tool For Power System Dynamics Course EducationJavad RahmanifardNoch keine Bewertungen
- Curriculum Vitae: Brijesh KumarDokument3 SeitenCurriculum Vitae: Brijesh KumarVigneshwaran KandaswamyNoch keine Bewertungen
- 20210514-Ac Machines Complete CoursefileDokument137 Seiten20210514-Ac Machines Complete Coursefilevaraprasad93Noch keine Bewertungen
- Simulation Thesis ExampleDokument5 SeitenSimulation Thesis Exampledwk3zwbx100% (2)
- Research Paper On "Study of Technical Parameters On Grid Connected PV System"Dokument7 SeitenResearch Paper On "Study of Technical Parameters On Grid Connected PV System"Mahesh ChapaiNoch keine Bewertungen
- SICEMDokument6 SeitenSICEMandreea tomaNoch keine Bewertungen
- 15 ICITPVParametersDokument7 Seiten15 ICITPVParameterssana ouferkachNoch keine Bewertungen
- Constant Current Fuzzy Logic Controller For Grid Connected Electric Vehicle ChargingDokument6 SeitenConstant Current Fuzzy Logic Controller For Grid Connected Electric Vehicle ChargingNik UrlaubNoch keine Bewertungen
- Experimental Test Bench of Photovoltaic Systems Using Backstepping MPPT AlgorithmDokument9 SeitenExperimental Test Bench of Photovoltaic Systems Using Backstepping MPPT AlgorithmMokhlis MohcineNoch keine Bewertungen
- Jdeed 2018Dokument6 SeitenJdeed 2018Anag SystemsNoch keine Bewertungen
- Impulse Voltage Generator Modelling Using MATLAB PDFDokument8 SeitenImpulse Voltage Generator Modelling Using MATLAB PDFAsmaNoch keine Bewertungen
- Indirect Matrix Converter ThesisDokument5 SeitenIndirect Matrix Converter Thesisdpk9wjs9100% (1)
- Power Electronics Homework Problem Solver On The Click: Session F4CDokument6 SeitenPower Electronics Homework Problem Solver On The Click: Session F4CsachithNoch keine Bewertungen
- Computer Applications in Engineering Education01Dokument15 SeitenComputer Applications in Engineering Education01asadAghaNoch keine Bewertungen
- DC & Synchronous Machines Lab ManualDokument65 SeitenDC & Synchronous Machines Lab ManualGopinath B L NaiduNoch keine Bewertungen
- RectifierDokument4 SeitenRectifiertearamisueNoch keine Bewertungen
- An Interactive Educational Learning Tool For PowerDokument8 SeitenAn Interactive Educational Learning Tool For Powerbima tampanNoch keine Bewertungen
- DC Motor Theory and SimulationDokument12 SeitenDC Motor Theory and Simulationfth-mrdNoch keine Bewertungen
- Latest Electrical Engineering Research PapersDokument8 SeitenLatest Electrical Engineering Research Papersafmdcwfdz100% (1)
- Cogging Torque Minimization of PMBLDCDokument11 SeitenCogging Torque Minimization of PMBLDCSanjayNoch keine Bewertungen
- Ejemplo de Paper 3Dokument9 SeitenEjemplo de Paper 3xdddd123aNoch keine Bewertungen
- A Step by Step Technique For Using SimulDokument10 SeitenA Step by Step Technique For Using SimulhajasoftwareNoch keine Bewertungen
- Modeling Solar Modules Performance Under Temperature and Solar Radiation of Western IraqDokument10 SeitenModeling Solar Modules Performance Under Temperature and Solar Radiation of Western Iraqعامر طايس سعيد عبد الجبارNoch keine Bewertungen
- Ieee 9Dokument8 SeitenIeee 9Rupesh SushirNoch keine Bewertungen
- A Modelling Tool To Investigate The Effect of Electric Vehicle Charging On Low Voltage NetworksDokument7 SeitenA Modelling Tool To Investigate The Effect of Electric Vehicle Charging On Low Voltage NetworkschopinaNoch keine Bewertungen
- PHD Thesis SimulationDokument4 SeitenPHD Thesis SimulationmelissahewittpalmbayNoch keine Bewertungen
- MeasurementofpowerqualityDokument6 SeitenMeasurementofpowerqualityEmir JusićNoch keine Bewertungen
- 19BEE075 ReportDokument23 Seiten19BEE075 ReportpppooNoch keine Bewertungen
- DSA/WDO Based PI Controller Tuning For D-STATCOM For Reactive Power CompensationDokument6 SeitenDSA/WDO Based PI Controller Tuning For D-STATCOM For Reactive Power CompensationpunyabanpatelNoch keine Bewertungen
- Modelling tool assesses impact of EV chargingDokument8 SeitenModelling tool assesses impact of EV chargingAlfonso AndresNoch keine Bewertungen
- Development of MATLAB-based Software For The Design of The Magnetic Circuit of Three-Phase Power TransformerDokument8 SeitenDevelopment of MATLAB-based Software For The Design of The Magnetic Circuit of Three-Phase Power TransformerAngling DharmaNoch keine Bewertungen
- Impulse Voltage Generation Using MATLAB/Simulink and Its Integration in Undergraduate High Voltage Engineering CourseDokument6 SeitenImpulse Voltage Generation Using MATLAB/Simulink and Its Integration in Undergraduate High Voltage Engineering CourseHamzah RezaNoch keine Bewertungen
- Paper No: Paper Presentation On: Faculty of Engineering & Technology Jamia Millia Islamia, New Delhi, IndiaDokument23 SeitenPaper No: Paper Presentation On: Faculty of Engineering & Technology Jamia Millia Islamia, New Delhi, IndiaAppurva AppanNoch keine Bewertungen
- On The Use of Low-Power Devices, Approximate Adders and Near-Threshold Operation For Energy-Efficient MultipliersDokument12 SeitenOn The Use of Low-Power Devices, Approximate Adders and Near-Threshold Operation For Energy-Efficient Multipliersprocess dasNoch keine Bewertungen
- Grid Connected PV System ThesisDokument5 SeitenGrid Connected PV System Thesisafktlrreerdihj100% (2)
- Computer AidedDokument7 SeitenComputer AidedKay KarthiNoch keine Bewertungen
- Implementation of Maximum Power Point Tracking (MPPT)Dokument44 SeitenImplementation of Maximum Power Point Tracking (MPPT)Emre ÖzerNoch keine Bewertungen
- Matlab Simulation For Power Factor CorrectionDokument7 SeitenMatlab Simulation For Power Factor CorrectionIJRASETPublicationsNoch keine Bewertungen
- Sajjad I 2013Dokument10 SeitenSajjad I 2013Yuli Asmi RahmanNoch keine Bewertungen
- Simulation model of PMSG for grid studiesDokument6 SeitenSimulation model of PMSG for grid studiesRupesh Arun KumarNoch keine Bewertungen
- Group 05Dokument13 SeitenGroup 05SiddhantNoch keine Bewertungen
- An Adaptive Auto-Reclosing Scheme To Preserve Transient Stability of MicrogridsDokument9 SeitenAn Adaptive Auto-Reclosing Scheme To Preserve Transient Stability of MicrogridsRicho TetukoNoch keine Bewertungen
- INDEL 2020 Paper 10Dokument6 SeitenINDEL 2020 Paper 10Michael LoupisNoch keine Bewertungen
- Teaching Numerical Methods in Engineering With MathcadDokument8 SeitenTeaching Numerical Methods in Engineering With MathcadKristine AlmarezNoch keine Bewertungen
- Heat Exchanger Design PDFDokument6 SeitenHeat Exchanger Design PDFKristine AlmarezNoch keine Bewertungen
- Fuel Ethanol Trade Measurements and Conversions RFADokument1 SeiteFuel Ethanol Trade Measurements and Conversions RFAEndi SingarimbunNoch keine Bewertungen
- Energy Conversion Basics ConceptsDokument7 SeitenEnergy Conversion Basics ConceptsKristine AlmarezNoch keine Bewertungen
- BatStateU-FO-CEAFA-02 - Application For Admission (Graduate School of Engineering) FILLABLEDokument2 SeitenBatStateU-FO-CEAFA-02 - Application For Admission (Graduate School of Engineering) FILLABLEKristine AlmarezNoch keine Bewertungen
- Probability and Statistics Lecture NotesDokument9 SeitenProbability and Statistics Lecture NotesKristine Almarez100% (1)
- Ethanol ConversionDokument1 SeiteEthanol ConversionKristine AlmarezNoch keine Bewertungen
- Gas Hydraulic PipelineDokument5 SeitenGas Hydraulic PipelineJuanNoch keine Bewertungen
- Chap1-Geometrical Optics - ExercisesDokument3 SeitenChap1-Geometrical Optics - ExercisesReema HlohNoch keine Bewertungen
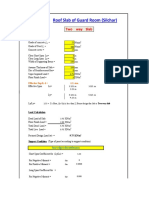
- Roof Slab of Guard RoomDokument3 SeitenRoof Slab of Guard RoomAditya KumarNoch keine Bewertungen
- CNC Meldas 60-60sDokument300 SeitenCNC Meldas 60-60schidambaram kasiNoch keine Bewertungen
- Sanju MT 799 PT Swi 100kDokument2 SeitenSanju MT 799 PT Swi 100kSumantri On LineNoch keine Bewertungen
- Aluminium GMAW GuideDokument32 SeitenAluminium GMAW GuideDaniel Salinas100% (2)
- How The Draganflyer Flies: So How Does It Work?Dokument5 SeitenHow The Draganflyer Flies: So How Does It Work?sav33Noch keine Bewertungen
- List of Linkages2016Dokument74 SeitenList of Linkages2016engrwho0% (1)
- Nord Motors Manual BookDokument70 SeitenNord Motors Manual Bookadh3ckNoch keine Bewertungen
- Types of Commercial CellDokument4 SeitenTypes of Commercial CellDaveNoch keine Bewertungen
- SPP 40 Series Sponsored BE MTech Projects CollegewiseDokument145 SeitenSPP 40 Series Sponsored BE MTech Projects CollegewiseVinay KumarNoch keine Bewertungen
- Fundamentals 2014Dokument959 SeitenFundamentals 2014Angelo Vittorio VettorazziNoch keine Bewertungen
- 176Dokument3 Seiten176Karthik AmigoNoch keine Bewertungen
- CV Ali EzzeddineDokument3 SeitenCV Ali EzzeddineOmar RajadNoch keine Bewertungen
- Application for Assistant Engineer PostDokument3 SeitenApplication for Assistant Engineer PostKandasamy Pandian SNoch keine Bewertungen
- Screw ConveyorDokument14 SeitenScrew ConveyorMuhammad NuhNoch keine Bewertungen
- Allcargo Corporate BrochureDokument12 SeitenAllcargo Corporate BrochureallinonecargologisticsNoch keine Bewertungen
- Safety Training Evaluation Form: Instructor RatingDokument1 SeiteSafety Training Evaluation Form: Instructor RatingNate JamesNoch keine Bewertungen
- UAV Course SyllabusDokument3 SeitenUAV Course Syllabushindaputra374100% (3)
- MS 01 182Dokument5 SeitenMS 01 182kicsnerNoch keine Bewertungen
- Managing ImapDokument408 SeitenManaging ImapPriya RaoNoch keine Bewertungen
- Seb ProjectDokument32 SeitenSeb ProjectperthlingNoch keine Bewertungen
- Transient and Random VibrationDokument19 SeitenTransient and Random VibrationAman SharmaNoch keine Bewertungen
- 21st Bomber Command Tactical Mission Report 146, OcrDokument54 Seiten21st Bomber Command Tactical Mission Report 146, OcrJapanAirRaidsNoch keine Bewertungen
- JEDI Slides Intro1 Chapter 02 Introduction To JavaDokument17 SeitenJEDI Slides Intro1 Chapter 02 Introduction To JavaredbutterflyNoch keine Bewertungen
- Rising Stem Ball ValveDokument6 SeitenRising Stem Ball ValveAnupam A. GandhewarNoch keine Bewertungen
- Protection Systems TransformerDokument14 SeitenProtection Systems Transformerrajabharath12Noch keine Bewertungen
- Jotafloor SL UniversalDokument6 SeitenJotafloor SL UniversalrogandatambunanNoch keine Bewertungen
- Methods of Piling ExplainedDokument3 SeitenMethods of Piling ExplainedRajesh KhadkaNoch keine Bewertungen
- Panasonic WJ FS616Dokument62 SeitenPanasonic WJ FS616triliteNoch keine Bewertungen
- Smart Lighting Market Analysis and Forecast 2025 by Global Marketing InsightsDokument5 SeitenSmart Lighting Market Analysis and Forecast 2025 by Global Marketing InsightsEko Hadi Susanto100% (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormVon EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormBewertung: 5 von 5 Sternen5/5 (5)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsVon EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsBewertung: 5 von 5 Sternen5/5 (2)
- Mental Math Secrets - How To Be a Human CalculatorVon EverandMental Math Secrets - How To Be a Human CalculatorBewertung: 5 von 5 Sternen5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingVon EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Von EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Bewertung: 5 von 5 Sternen5/5 (1)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenVon EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNoch keine Bewertungen
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceVon EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNoch keine Bewertungen
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeVon EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeBewertung: 4 von 5 Sternen4/5 (2)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusVon EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusBewertung: 4.5 von 5 Sternen4.5/5 (2)
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Math Magic: How To Master Everyday Math ProblemsVon EverandMath Magic: How To Master Everyday Math ProblemsBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Psychology Behind Mathematics - The Comprehensive GuideVon EverandPsychology Behind Mathematics - The Comprehensive GuideNoch keine Bewertungen
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Von EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Noch keine Bewertungen
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormVon EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormBewertung: 4.5 von 5 Sternen4.5/5 (20)
- Limitless Mind: Learn, Lead, and Live Without BarriersVon EverandLimitless Mind: Learn, Lead, and Live Without BarriersBewertung: 4 von 5 Sternen4/5 (6)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsVon EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsBewertung: 3.5 von 5 Sternen3.5/5 (9)