Das könnte Ihnen auch gefallen
- Simple Step Command Set and Communications ProtocolDokument10 SeitenSimple Step Command Set and Communications ProtocolJose CoraNoch keine Bewertungen
- ServoDokument7 SeitenServohaaenNoch keine Bewertungen
- PackMule SC-775-6SA Handset Manual (Sevcon)Dokument11 SeitenPackMule SC-775-6SA Handset Manual (Sevcon)martinNoch keine Bewertungen
- User Manual Vsett All ModelsDokument40 SeitenUser Manual Vsett All ModelsOCTOPUSNoch keine Bewertungen
- The University of Faisalabad: Experiment No.10Dokument5 SeitenThe University of Faisalabad: Experiment No.10Arbab AslamNoch keine Bewertungen
- Mud System SensorsDokument14 SeitenMud System SensorsMohamad TayeaNoch keine Bewertungen
- User Manual For RadioLink TransmitterDokument18 SeitenUser Manual For RadioLink TransmitterJohn AcostaNoch keine Bewertungen
- 7300 CV Quick Start Programming GuideDokument10 Seiten7300 CV Quick Start Programming Guidenitin hadkeNoch keine Bewertungen
- Servo Tuning TutorialDokument38 SeitenServo Tuning TutorialpranavNoch keine Bewertungen
- Elec Ns U ManualDokument35 SeitenElec Ns U ManualSenares ArdoNoch keine Bewertungen
- 3-12 - Subaru Outback (2011) ManualDokument1 Seite3-12 - Subaru Outback (2011) ManualBLACKSHELONoch keine Bewertungen
- Lecture 08 Experiment-12Dokument11 SeitenLecture 08 Experiment-12linn.pa.pa.khaing.2020.2021.fbNoch keine Bewertungen
- 9G Servo ModDokument4 Seiten9G Servo Modthamer al-salekNoch keine Bewertungen
- Fanuc TrainingDokument42 SeitenFanuc TrainingCarlos Musella100% (4)
- TachometerDokument2 SeitenTachometerKreshia CuasayNoch keine Bewertungen
- LCDA630 Driver Manual 2023 (1) - 014759Dokument540 SeitenLCDA630 Driver Manual 2023 (1) - 014759Tegar BramantyoNoch keine Bewertungen
- Winch Driving & WSDP Alarms PDFDokument6 SeitenWinch Driving & WSDP Alarms PDFMaaz Bin FurqanNoch keine Bewertungen
- Catalogo ServomotorDokument36 SeitenCatalogo ServomotorLuis LopezNoch keine Bewertungen
- Evo 6000Dokument14 SeitenEvo 6000Najwa AmirahNoch keine Bewertungen
- (628511708) Wizard.6.ManualDokument5 Seiten(628511708) Wizard.6.Manualjrodriguez_691557Noch keine Bewertungen
- Cabalse - Keen LE8 NocodeDokument3 SeitenCabalse - Keen LE8 NocodeKeen Gementiza CabalseNoch keine Bewertungen
- Laboratory Exercise 8 - Servo Motor: A. MaterialsDokument4 SeitenLaboratory Exercise 8 - Servo Motor: A. MaterialsKeen Gementiza CabalseNoch keine Bewertungen
- Servo Motor Speed and Direction ControlDokument7 SeitenServo Motor Speed and Direction Controltazeb100% (1)
- Typical YSC-8260 & 8262 User ManualDokument2 SeitenTypical YSC-8260 & 8262 User ManualAmir HajihashemNoch keine Bewertungen
- Manuals MISHUBISHI PDFDokument143 SeitenManuals MISHUBISHI PDFVanHoangNoch keine Bewertungen
- Servo FloatDokument22 SeitenServo FloatMichał MarczakNoch keine Bewertungen
- Electronic Engine Governor Controller Operation ManualDokument7 SeitenElectronic Engine Governor Controller Operation ManualVinhNoch keine Bewertungen
- 36V - 72V BT ControllerDokument9 Seiten36V - 72V BT ControllerHenry ElacoriNoch keine Bewertungen
- KA KR Motor Driver ManualDokument33 SeitenKA KR Motor Driver Manualalexandr.vl.smk2Noch keine Bewertungen
- Manual para Servo Driver Mitsubishi MRZJWDokument30 SeitenManual para Servo Driver Mitsubishi MRZJWNestor Mauricio Barragan NegroNoch keine Bewertungen
- Nissan Note E-Power 2022 Quick Guide ENDokument57 SeitenNissan Note E-Power 2022 Quick Guide ENSarita EmmanuelNoch keine Bewertungen
- Pulse Width To Voltage Converter: Servo MotorDokument2 SeitenPulse Width To Voltage Converter: Servo MotorPraba Karan DNoch keine Bewertungen
- LAB 2-AngeladaDokument20 SeitenLAB 2-AngeladaAlehamarie AngeladaNoch keine Bewertungen
- S700-Manual XT 750Dokument23 SeitenS700-Manual XT 750Raul CordobaNoch keine Bewertungen
- Multi-Rotor: Naza User ManualDokument40 SeitenMulti-Rotor: Naza User ManualAnonymous MGQjG1Noch keine Bewertungen
- RC Super 2 4cylinderDokument27 SeitenRC Super 2 4cylinderZaita FregaNoch keine Bewertungen
- 006-0129-00 REV F Atr - SpecificationsDokument1 Seite006-0129-00 REV F Atr - SpecificationsShawn DownloaderNoch keine Bewertungen
- User's Manual: ZDJ-SRIII MicrocontrollerDokument8 SeitenUser's Manual: ZDJ-SRIII MicrocontrollerHernando Fang PedrozaNoch keine Bewertungen
- Servomotor Information: Standard Servo MotorDokument14 SeitenServomotor Information: Standard Servo MotorBiswajit PaulNoch keine Bewertungen
- Fuji Driver Gearless EnglishDokument3 SeitenFuji Driver Gearless EnglishBojan DrljachaNoch keine Bewertungen
- Teco E510 Quick Start Guide en v1Dokument8 SeitenTeco E510 Quick Start Guide en v1Fabian Vazquez OrtegaNoch keine Bewertungen
- 02 StartupDokument10 Seiten02 StartupCamilo HerreraNoch keine Bewertungen
- RC Servo User's ManualDokument10 SeitenRC Servo User's ManualJawdat Ahmed RanaNoch keine Bewertungen
- Lcd-Manual - S900 Ebike Intelligent DisplayDokument8 SeitenLcd-Manual - S900 Ebike Intelligent Displaypercy ccahuanaNoch keine Bewertungen
- KP308.V1.0 Controller Operation Manual 2nd VersionDokument28 SeitenKP308.V1.0 Controller Operation Manual 2nd Versiontonielhage100% (7)
- BLX2Dokument18 SeitenBLX2NelsonNoch keine Bewertungen
- Multi Channel RemoteDokument6 SeitenMulti Channel RemotebharathvasagamNoch keine Bewertungen
- D10C604电气随机文件 英文Dokument39 SeitenD10C604电气随机文件 英文Habibulla Bavaji0% (1)
- FR E700 ParameterDokument5 SeitenFR E700 ParameterSilentXNoch keine Bewertungen
- Zero Speed Switch Working Principle - Inst ToolsDokument11 SeitenZero Speed Switch Working Principle - Inst ToolsBasabRajNoch keine Bewertungen
- Guarantee TimeDokument12 SeitenGuarantee TimeRene CamaraNoch keine Bewertungen
- Controlling Stepper Motor: Experiment #4Dokument9 SeitenControlling Stepper Motor: Experiment #4Asaad HalayqaNoch keine Bewertungen
- Introduction To Industrial Robot ProgrammingDokument49 SeitenIntroduction To Industrial Robot ProgrammingipmcmtyNoch keine Bewertungen
- PreVV Communication Protocol TablesDokument9 SeitenPreVV Communication Protocol Tables1814100Noch keine Bewertungen
- IP Manipulator Op ManualDokument10 SeitenIP Manipulator Op ManualBaptiste DespresNoch keine Bewertungen
- Siemens-Sitrans-ProbeLU HartQSG 7ML19985QR81 5Dokument8 SeitenSiemens-Sitrans-ProbeLU HartQSG 7ML19985QR81 5Sudipto MajumderNoch keine Bewertungen
- Mercury SmartCraft Operations ManualDokument96 SeitenMercury SmartCraft Operations ManualQueremosabarrabás A Barrabás100% (1)
- Deepak PotDokument3 SeitenDeepak PotRahul9228Noch keine Bewertungen
- Automotive Sensor Testing and Waveform AnalysisVon EverandAutomotive Sensor Testing and Waveform AnalysisBewertung: 4.5 von 5 Sternen4.5/5 (13)
- SVC Manual C2670 EngDokument146 SeitenSVC Manual C2670 EngAnonymous 1lbWGmNoch keine Bewertungen
- (Pasig) Certificate of OccupancyDokument12 Seiten(Pasig) Certificate of OccupancyAndrew MarasiganNoch keine Bewertungen
- Grdds ReviewDokument33 SeitenGrdds ReviewvaibhavbpatelNoch keine Bewertungen
- Wind Energy Unit-EEEDokument6 SeitenWind Energy Unit-EEEpfalencarNoch keine Bewertungen
- Clevo d900c Sager Np9260 Np9261Dokument100 SeitenClevo d900c Sager Np9260 Np9261Doru RazvanNoch keine Bewertungen
- Multi Spindl Drilling MachineDokument38 SeitenMulti Spindl Drilling MachineBoopathi KalaiNoch keine Bewertungen
- Chapter 6 SlidesDokument28 SeitenChapter 6 Slidesshinde_jayesh2005Noch keine Bewertungen
- MMPB 730 RerollDokument4 SeitenMMPB 730 RerollLuis Padilla SandovalNoch keine Bewertungen
- Supplier Run Rate CalculatorDokument9 SeitenSupplier Run Rate CalculatordcevipinNoch keine Bewertungen
- AIP Puducherry Aerodrome, IndiaDokument13 SeitenAIP Puducherry Aerodrome, Indiass khadriNoch keine Bewertungen
- Battery CatalogueDokument6 SeitenBattery CataloguerantaroNoch keine Bewertungen
- ViO80 1A PDFDokument2 SeitenViO80 1A PDFTomislav1998Noch keine Bewertungen
- Binsar Margiyanto: ND RDDokument2 SeitenBinsar Margiyanto: ND RDmoez ben youssefNoch keine Bewertungen
- Differential Calculus Assignment No.3Dokument20 SeitenDifferential Calculus Assignment No.3Agerico FunelasNoch keine Bewertungen
- Safety in The Kitchen - 1Dokument36 SeitenSafety in The Kitchen - 1Roxanne OquendoNoch keine Bewertungen
- Flextronics FINALDokument25 SeitenFlextronics FINALAnkit GauravNoch keine Bewertungen
- Pedestrian Design Guidelines PDFDokument50 SeitenPedestrian Design Guidelines PDFIvan AndradeNoch keine Bewertungen
- The PA Bible Addn 03 Microphones PDFDokument4 SeitenThe PA Bible Addn 03 Microphones PDFjosiasns5257100% (1)
- Catalogo EpirocDokument7 SeitenCatalogo EpirocAngel García0% (1)
- Pipe Color CodeDokument1 SeitePipe Color CodePatricia de los SantosNoch keine Bewertungen
- Sumanta Chowdhury - CLS Aipmt-15-16 XIII Phy Study-Package-7 Set-1 Chapter-27Dokument32 SeitenSumanta Chowdhury - CLS Aipmt-15-16 XIII Phy Study-Package-7 Set-1 Chapter-27Rohit Raj0% (1)
- Patrol Box PlansDokument6 SeitenPatrol Box PlansPePe ProjectsNoch keine Bewertungen
- 92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021Dokument20 Seiten92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021trickyggNoch keine Bewertungen
- Hydraulics - Civil Engineering Questions and Answers Page 3Dokument6 SeitenHydraulics - Civil Engineering Questions and Answers Page 3umairNoch keine Bewertungen
- Chapter 1 Introduction To Green BuildingsDokument19 SeitenChapter 1 Introduction To Green BuildingsSunil BeheraNoch keine Bewertungen
- Bansilal Ramnath Agarwal Charitable Trust'sDokument2 SeitenBansilal Ramnath Agarwal Charitable Trust'sJennifer WaltonNoch keine Bewertungen
- Código BoogaDokument138 SeitenCódigo BoogaJazmin SeguelNoch keine Bewertungen
- Investigating The Effect of Liquid Viscosity On Two Phase Gas Liquid FlowDokument252 SeitenInvestigating The Effect of Liquid Viscosity On Two Phase Gas Liquid FlowAnonymous DMh6pdl0aNoch keine Bewertungen
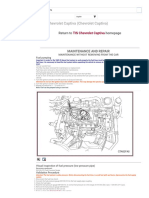
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Dokument57 SeitenChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- Mitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualDokument152 SeitenMitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualRafael GagoNoch keine Bewertungen