Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- MEEN 472 Syllabus Fall 2017Dokument4 SeitenMEEN 472 Syllabus Fall 2017Bacio GuidoNoch keine Bewertungen
- Gusset Plate Connection To Round HSS Tension MembersDokument7 SeitenGusset Plate Connection To Round HSS Tension Membersglav1309Noch keine Bewertungen
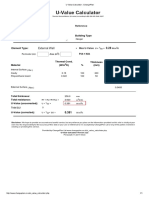
- U Value Calculator - With Liner Only1Dokument1 SeiteU Value Calculator - With Liner Only1muathNoch keine Bewertungen
- Overview of The Cement Manufacturing ProcessDokument26 SeitenOverview of The Cement Manufacturing ProcessMahmoud RashadNoch keine Bewertungen
- ABLOY Fire Door Closing Systems - 2018Dokument16 SeitenABLOY Fire Door Closing Systems - 2018eaglebrdNoch keine Bewertungen
- Is417 Ettringite Formation and The Performance of ConcreteDokument16 SeitenIs417 Ettringite Formation and The Performance of ConcreteMayank Singh100% (1)
- Bed CoilDokument8 SeitenBed CoilMahadev KovalliNoch keine Bewertungen
- Bahay Na BatoDokument11 SeitenBahay Na BatoDanica May TorresNoch keine Bewertungen
- 360 Dome Projection Big Dome Tent For Commercial Exhibition Event-SHELTER ARCHITECTURE TECHNOLOGY (GUANGDONG) CO.,LTDDokument12 Seiten360 Dome Projection Big Dome Tent For Commercial Exhibition Event-SHELTER ARCHITECTURE TECHNOLOGY (GUANGDONG) CO.,LTDMahesh GopalakrishnanNoch keine Bewertungen
- Portal Frame - Airport Hangar PDFDokument12 SeitenPortal Frame - Airport Hangar PDFShinjini BhattacharjeeNoch keine Bewertungen
- Anti Termite TreatmentDokument99 SeitenAnti Termite TreatmentPja ShanthaNoch keine Bewertungen
- INST. INST. 844-TZ For Item 40Dokument4 SeitenINST. INST. 844-TZ For Item 40Zubab Panni100% (1)
- Construction Terms Beginning With Letter: ZDokument52 SeitenConstruction Terms Beginning With Letter: ZnotevaleNoch keine Bewertungen
- Power Plant Coaching.Dokument352 SeitenPower Plant Coaching.Wati KaNoch keine Bewertungen
- General Body Repairs PDFDokument72 SeitenGeneral Body Repairs PDFRADEKNoch keine Bewertungen
- Non Distructive Testing ManualDokument10 SeitenNon Distructive Testing ManualPrashanth Sunagar100% (2)
- Dossier Teca A BDokument20 SeitenDossier Teca A Bpeter2002Noch keine Bewertungen
- Cl80 Inrow Cooler: Data SheetDokument2 SeitenCl80 Inrow Cooler: Data SheetRavi ShankarNoch keine Bewertungen
- Utilisation of Waste Plastic in Bituminous Mixes For Road ConstructionDokument34 SeitenUtilisation of Waste Plastic in Bituminous Mixes For Road Constructionshiva5059100% (4)
- (IRI-07-SOP) FeedwaterSystem PDFDokument19 Seiten(IRI-07-SOP) FeedwaterSystem PDFvishnuNoch keine Bewertungen
- ASTM A350/A350M-07 Standard Specification For Carbon and Low-Alloy Steel Forgings, Requiring Notch Toughness Testing For Piping ComponentsDokument9 SeitenASTM A350/A350M-07 Standard Specification For Carbon and Low-Alloy Steel Forgings, Requiring Notch Toughness Testing For Piping ComponentsAtul Anand SrivastavaNoch keine Bewertungen
- QA/QC Inspection Checklist: Design Coordinates, Inc. CP No. - Vector ThreeDokument2 SeitenQA/QC Inspection Checklist: Design Coordinates, Inc. CP No. - Vector ThreeNon Etabas GadnatamNoch keine Bewertungen
- LIBRO3Dokument43 SeitenLIBRO3Camilo LacoutureNoch keine Bewertungen
- Dme Unit I Mech 30.6.12Dokument22 SeitenDme Unit I Mech 30.6.12PN MohankumarNoch keine Bewertungen
- Intact Rock - Deformability, Strength and Failure v2Dokument18 SeitenIntact Rock - Deformability, Strength and Failure v2Omar Benito CubaNoch keine Bewertungen
- Current Revision Approved: Base Unit Hydraulics, 68H/SbsDokument2 SeitenCurrent Revision Approved: Base Unit Hydraulics, 68H/Sbscapslive_001Noch keine Bewertungen
- 1-Piping Manual-Pdms12Dokument413 Seiten1-Piping Manual-Pdms12MOHSEN2005IBNoch keine Bewertungen
- 3 - High Temperature CorrosionDokument35 Seiten3 - High Temperature CorrosiondennykvgNoch keine Bewertungen
- Kesten Chapter 9 10.24Dokument28 SeitenKesten Chapter 9 10.24Jzaross JosephNoch keine Bewertungen
- An Overview of Dual-Phase SteelsDokument43 SeitenAn Overview of Dual-Phase SteelsLaura RodriguezNoch keine Bewertungen