Das könnte Ihnen auch gefallen
- How To Setup GRBL & Control CNC Machine With ArduinoDokument19 SeitenHow To Setup GRBL & Control CNC Machine With ArduinoYasir Yasir KovanNoch keine Bewertungen
- GRBL Configuration and Setting Up Your Machine For The First TimeDokument4 SeitenGRBL Configuration and Setting Up Your Machine For The First TimeKishor MhaskeNoch keine Bewertungen
- CNC3 User Manual - V1.2Dokument14 SeitenCNC3 User Manual - V1.2Marcel FischerNoch keine Bewertungen
- Install: Windows: GRBL 1.1Dokument31 SeitenInstall: Windows: GRBL 1.1Martas DeskNoch keine Bewertungen
- Mach3 Software InstallationDokument9 SeitenMach3 Software Installationgabrieldromano1Noch keine Bewertungen
- Using GRBL GRBL Wiki GitHubDokument8 SeitenUsing GRBL GRBL Wiki GitHubMarky MaypoNoch keine Bewertungen
- Probe Mach3Dokument1 SeiteProbe Mach3Paulo TeixeiraNoch keine Bewertungen
- Open HabDokument51 SeitenOpen HabbaluveeNoch keine Bewertungen
- Supply Module TVM 2.4: RexrothDokument65 SeitenSupply Module TVM 2.4: RexrothZoran ŠiručkaNoch keine Bewertungen
- User Manual 1.0 PDFDokument18 SeitenUser Manual 1.0 PDFnelusabieNoch keine Bewertungen
- CNC Shield Guide PDFDokument31 SeitenCNC Shield Guide PDFpolikarpa100% (1)
- 25 Useful Arduino Shields That You Might Need To Get - Random Nerd TutorialsDokument30 Seiten25 Useful Arduino Shields That You Might Need To Get - Random Nerd TutorialsRadismel Salazar FudichelisNoch keine Bewertungen
- Pro e 4 Install GuideDokument1 SeitePro e 4 Install GuidePrawin RamNoch keine Bewertungen
- Mini CNC Plotter ArduinoDokument9 SeitenMini CNC Plotter ArduinoDaniel AyosaNoch keine Bewertungen
- Raspberry Pi Alamode CNC ControllerDokument28 SeitenRaspberry Pi Alamode CNC ControllerMarius DanilaNoch keine Bewertungen
- Grbl-Panel Wiki GitHubDokument3 SeitenGrbl-Panel Wiki GitHubMarky Maypo100% (1)
- Mach3 VBDokument9 SeitenMach3 VBjavedpakNoch keine Bewertungen
- Fixed Tool ZeroDokument4 SeitenFixed Tool ZeroKularathna SeneshNoch keine Bewertungen
- Connecting GRBL Hardware GRBL Wiki GitHubDokument5 SeitenConnecting GRBL Hardware GRBL Wiki GitHubMarky Maypo0% (1)
- INDRAMAT Manuals 2065 PDFDokument346 SeitenINDRAMAT Manuals 2065 PDFHoracio BritezNoch keine Bewertungen
- Me 445 Integrated Manufacturing Technologies Experiment 2 "Process Planning in Turning Machine"Dokument8 SeitenMe 445 Integrated Manufacturing Technologies Experiment 2 "Process Planning in Turning Machine"Sunil SharmaNoch keine Bewertungen
- Indramat KDV 2.3Dokument57 SeitenIndramat KDV 2.3Tomaz HadnerNoch keine Bewertungen
- Features:: Mach3 USB Card Installation ManualDokument42 SeitenFeatures:: Mach3 USB Card Installation ManualAndronic SebastianNoch keine Bewertungen
- Mastercam Art v9 - Crack InstructionsDokument1 SeiteMastercam Art v9 - Crack InstructionsDaniel JimenezNoch keine Bewertungen
- Operating Parameter Programming Module Wam 1019 Indramat Manual PDFDokument11 SeitenOperating Parameter Programming Module Wam 1019 Indramat Manual PDFremus popescuNoch keine Bewertungen
- Analog Inputs With Arduino & Mach3Dokument8 SeitenAnalog Inputs With Arduino & Mach3Francisco Campoverde100% (2)
- Smart Filament Sensor Module ManualDokument16 SeitenSmart Filament Sensor Module ManualEko100% (1)
- Test-Apro 5-Axis Sample Chapter 10 OptimizedDokument33 SeitenTest-Apro 5-Axis Sample Chapter 10 OptimizedRaymond LO Otucopi100% (4)
- GazS ToolSetter MacroV2Dokument5 SeitenGazS ToolSetter MacroV2Kularathna SeneshNoch keine Bewertungen
- Mach3 - ManualDokument106 SeitenMach3 - Manualrcarlosrs100% (2)
- 3040zq Usb GuideDokument13 Seiten3040zq Usb GuideOswald FrankNoch keine Bewertungen
- Hoja de Configuraciones laserGRBLDokument4 SeitenHoja de Configuraciones laserGRBLJacobo TovarNoch keine Bewertungen
- AXBB E ManualDokument29 SeitenAXBB E ManualKenny HebertNoch keine Bewertungen
- Topsolid: Topsolid'Cam From Missler SoftwareDokument2 SeitenTopsolid: Topsolid'Cam From Missler SoftwareBG2012Noch keine Bewertungen
- Heidenhain Touch ProbeDokument72 SeitenHeidenhain Touch ProbeHoho Hahov100% (1)
- G100 Set Up Guide Rev.1 9-19-07Dokument34 SeitenG100 Set Up Guide Rev.1 9-19-07Milton MarinNoch keine Bewertungen
- Creating A Bootable DOS CD V 1.5Dokument25 SeitenCreating A Bootable DOS CD V 1.5DooLooNoch keine Bewertungen
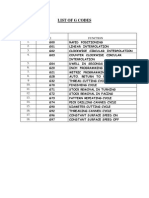
- List of G Codes: SR - NO. Code Function 1. 2. 3. 4Dokument28 SeitenList of G Codes: SR - NO. Code Function 1. 2. 3. 4pmagrawal100% (1)
- 04 - Intro Lego RCX CodeDokument53 Seiten04 - Intro Lego RCX CodegatobravoNoch keine Bewertungen
- How Subprograms Work: Subprograms in Mastercam Mill and LatheDokument16 SeitenHow Subprograms Work: Subprograms in Mastercam Mill and LatheHoang LamNoch keine Bewertungen
- Grblcontrol CNC Software InstructionsDokument5 SeitenGrblcontrol CNC Software Instructionssea13Noch keine Bewertungen
- Post Processor Configuration GuideDokument59 SeitenPost Processor Configuration GuideHisham Tarek100% (1)
- Heated Seats RetroFitDokument49 SeitenHeated Seats RetroFitGyörök Peter100% (1)
- LT-42 52 65Dokument228 SeitenLT-42 52 65seregeNoch keine Bewertungen
- Getting Started With ArtCAM ExpressDokument89 SeitenGetting Started With ArtCAM ExpressBojan RadovanovicNoch keine Bewertungen
- Install Instructions 3.45Dokument1 SeiteInstall Instructions 3.45Sandor JakabNoch keine Bewertungen
- CNC USB Controller Mk1 PDFDokument18 SeitenCNC USB Controller Mk1 PDFService Engineer100% (1)
- 307 Parameter InformationDokument293 Seiten307 Parameter InformationHoang LamNoch keine Bewertungen
- Stepper Motor & Drivers - USB MACH3 4 Axis Controller - PENTING!Dokument6 SeitenStepper Motor & Drivers - USB MACH3 4 Axis Controller - PENTING!FalahNoch keine Bewertungen
- Mach4 Mill GCode ManualDokument60 SeitenMach4 Mill GCode Manualsahiljain_146Noch keine Bewertungen
- A Generic Webcam Image Acquisition Plug in For Image JDokument3 SeitenA Generic Webcam Image Acquisition Plug in For Image Jgaby-01Noch keine Bewertungen
- Mach3 ATC MacroDokument9 SeitenMach3 ATC MacroSimasArmonas100% (1)
- Y Axis AssemblyDokument25 SeitenY Axis AssemblyNixonGarciaNoch keine Bewertungen
- Part B: User ManualDokument13 SeitenPart B: User ManualtecnicoopNoch keine Bewertungen
- CNC2 User Manual - V1.0Dokument12 SeitenCNC2 User Manual - V1.0David GomezNoch keine Bewertungen
- Configuring GRBL Wiki GitHubDokument18 SeitenConfiguring GRBL Wiki GitHubMarky MaypoNoch keine Bewertungen
- Scrcpy Commands and ShortcutsDokument9 SeitenScrcpy Commands and ShortcutsKaushik SenapatiNoch keine Bewertungen
- Configuring GRBL v0.9 GRBL - GRBL Wiki GitHubDokument17 SeitenConfiguring GRBL v0.9 GRBL - GRBL Wiki GitHubBams HaryNoch keine Bewertungen
- Sigma New Features Quick ManualDokument24 SeitenSigma New Features Quick ManualAlexandre HesslerNoch keine Bewertungen
- Beta Function - WikipediaDokument5 SeitenBeta Function - WikipediarickrsvNoch keine Bewertungen
- Sibanda GNSS 2014Dokument70 SeitenSibanda GNSS 2014tio aulia basudewaNoch keine Bewertungen
- Bookami Pattern: Created by Fold Your Own BookDokument9 SeitenBookami Pattern: Created by Fold Your Own BookBrian MooreNoch keine Bewertungen
- Fault Detection and NotificationDokument9 SeitenFault Detection and NotificationHarish manjunathNoch keine Bewertungen
- Airline Reservation SystemDokument38 SeitenAirline Reservation SystemSumanth Reddy75% (4)
- Ict 2 GuideDokument3 SeitenIct 2 GuideTusiimeNoch keine Bewertungen
- International Journal of Computer Science and Security (IJCSS), Volume (3), IssueDokument119 SeitenInternational Journal of Computer Science and Security (IJCSS), Volume (3), IssueAI Coordinator - CSC JournalsNoch keine Bewertungen
- Process Simulate Human: TutorialDokument51 SeitenProcess Simulate Human: TutorialIness Noussa100% (1)
- Archive Services For SAP Configuration Guide 6 5Dokument37 SeitenArchive Services For SAP Configuration Guide 6 5jazarjaNoch keine Bewertungen
- Opening The ValveDokument8 SeitenOpening The ValveLakshmipriya Nagarajan100% (1)
- Worksheet 2.1Object-Oriented Paradigm IntroductionDokument9 SeitenWorksheet 2.1Object-Oriented Paradigm IntroductionLorena FajardoNoch keine Bewertungen
- ChangelogDokument11 SeitenChangelogKaushikPaulNoch keine Bewertungen
- MODBUS TCP Intop ENG PDFDokument48 SeitenMODBUS TCP Intop ENG PDFMessias De Oliveira SantosNoch keine Bewertungen
- Macherla Pranay KumarDokument2 SeitenMacherla Pranay KumarMACHERLA PRANAY KUMARNoch keine Bewertungen
- SCM Fault QC Petrel 2010Dokument12 SeitenSCM Fault QC Petrel 2010aidaNoch keine Bewertungen
- Visual Basic Basic Visual Basic Beginnings All Purpose Symbolic Instruction Codes Programming Programmers Programmers ProgrammingDokument65 SeitenVisual Basic Basic Visual Basic Beginnings All Purpose Symbolic Instruction Codes Programming Programmers Programmers Programmingbright_kareliNoch keine Bewertungen
- CMTDokument8 SeitenCMTShadab Ahmed GhazalyNoch keine Bewertungen
- Blue Purple Futuristic Modern 3D Tech Company Business PresentationDokument10 SeitenBlue Purple Futuristic Modern 3D Tech Company Business PresentationUser Not FoundNoch keine Bewertungen
- Gaussian EleminationDokument7 SeitenGaussian EleminationMuhammad RahmandaniNoch keine Bewertungen
- Prepress Technician or Prepress Operator or Desktop Publisher orDokument2 SeitenPrepress Technician or Prepress Operator or Desktop Publisher orapi-78485174Noch keine Bewertungen
- Final 1Dokument51 SeitenFinal 1jansky37Noch keine Bewertungen
- Hardware Information Guide: Emc Vnxe Series Vnxe3200Dokument65 SeitenHardware Information Guide: Emc Vnxe Series Vnxe3200Anonymous n4NOOONoch keine Bewertungen
- SAP SLCM - Product ArchitectureDokument59 SeitenSAP SLCM - Product ArchitectureFawad AslamNoch keine Bewertungen
- Proposal Line FollowerDokument18 SeitenProposal Line FollowerMelkamu SimenehNoch keine Bewertungen
- EC1 Preside PAPDokument90 SeitenEC1 Preside PAPX19_fredNoch keine Bewertungen
- Incremental ModelDokument8 SeitenIncremental ModelmonishaNoch keine Bewertungen
- Database Management System: Introduction of DBMSDokument25 SeitenDatabase Management System: Introduction of DBMSAsmatullah HaroonNoch keine Bewertungen
- Task Sheet 1.1-5: Cblms On Trainers Methodology Level I Planning Training Sessions Document No. Issued By: NttaDokument2 SeitenTask Sheet 1.1-5: Cblms On Trainers Methodology Level I Planning Training Sessions Document No. Issued By: NttaJeissa LaraNoch keine Bewertungen
- AME Integrated Approvals For Outbound Sales Orders in R12.2.8 EBS Order ManagementDokument19 SeitenAME Integrated Approvals For Outbound Sales Orders in R12.2.8 EBS Order ManagementharishNoch keine Bewertungen
- BasicDokument484 SeitenBasicVinod BargukarNoch keine Bewertungen