Das könnte Ihnen auch gefallen
- 1803 Hector Berlioz - Compositions - AllMusicDokument6 Seiten1803 Hector Berlioz - Compositions - AllMusicYannisVarthisNoch keine Bewertungen
- Fill in The BlanksDokument38 SeitenFill in The Blanksamit48897Noch keine Bewertungen
- Docu-83 KUKA ArcSense 20 en PDFDokument81 SeitenDocu-83 KUKA ArcSense 20 en PDFArūnas TalvaševičiusNoch keine Bewertungen
- KST ServoGun TC 41 enDokument125 SeitenKST ServoGun TC 41 enKristal NewtonNoch keine Bewertungen
- KUKA KR C4 Assembly and Operating Instructions GuideDokument33 SeitenKUKA KR C4 Assembly and Operating Instructions GuideArturo PuenteNoch keine Bewertungen
- KSS 41 END enDokument702 SeitenKSS 41 END enJavier Del Pozo Garcia100% (1)
- RFID Sticker and and Card Replacement 2019 PDFDokument1 SeiteRFID Sticker and and Card Replacement 2019 PDFJessamyn DimalibotNoch keine Bewertungen
- Setup OfficeLite enDokument27 SeitenSetup OfficeLite entazba009Noch keine Bewertungen
- Sterilization and DisinfectionDokument100 SeitenSterilization and DisinfectionReenaChauhanNoch keine Bewertungen
- Setup and Interfacing of A KUKA Robotics Lab PDFDokument89 SeitenSetup and Interfacing of A KUKA Robotics Lab PDFAugustino Nguyen Cao ThangNoch keine Bewertungen
- KR C2 Interbus PCI en PDFDokument63 SeitenKR C2 Interbus PCI en PDFelmacuarro5Noch keine Bewertungen
- VST EthernetKRL 22 en PDFDokument81 SeitenVST EthernetKRL 22 en PDFMolitorisz AndorNoch keine Bewertungen
- Kuka External CablingDokument33 SeitenKuka External Cablingemil100% (1)
- Connect Kuka Robots With RoboDKDokument7 SeitenConnect Kuka Robots With RoboDKMolitorisz AndorNoch keine Bewertungen
- KRC4-Optional Interfaces enDokument99 SeitenKRC4-Optional Interfaces encabecavil100% (2)
- Manual Profinet 3HAC031975-001 RevC enDokument72 SeitenManual Profinet 3HAC031975-001 RevC enHerminio GómezNoch keine Bewertungen
- KUKA Sim ENDokument5 SeitenKUKA Sim ENDiego Rivera0% (1)
- Drive DC Reliance MaxPack - Plus PDFDokument59 SeitenDrive DC Reliance MaxPack - Plus PDFJuan David Ardila TorresNoch keine Bewertungen
- 3HAC050979 AM Spot Options RW 6-EnDokument266 Seiten3HAC050979 AM Spot Options RW 6-EncheloooxxxNoch keine Bewertungen
- Connect robot with RoboDK (KukaDokument6 SeitenConnect robot with RoboDK (KukaRicardo100% (1)
- Soldadura Manual KukaDokument78 SeitenSoldadura Manual KukaEduardoNoch keine Bewertungen
- KR C4 PROFIBUS KSS VSS 85 86 enDokument57 SeitenKR C4 PROFIBUS KSS VSS 85 86 enshrusNoch keine Bewertungen
- Workbook P3KSS8 Programming 3 V1 enDokument93 SeitenWorkbook P3KSS8 Programming 3 V1 enAlex PupkinNoch keine Bewertungen
- KUKA - SafeOperation 3.2Dokument205 SeitenKUKA - SafeOperation 3.2JoeyNoch keine Bewertungen
- Abb Servo Gun TuningDokument58 SeitenAbb Servo Gun TuningsuhairezanNoch keine Bewertungen
- ! Sco Global Impex 25.06.20Dokument7 Seiten! Sco Global Impex 25.06.20Houssam Eddine MimouneNoch keine Bewertungen
- MA External Axis Box KR C4 Compact enDokument55 SeitenMA External Axis Box KR C4 Compact enDave FansolatoNoch keine Bewertungen
- KUKA Arc Welding ARC Tech 10E Operation R22 enDokument99 SeitenKUKA Arc Welding ARC Tech 10E Operation R22 enВасиль РибакNoch keine Bewertungen
- C - TS4CO - 2021: There Are 2 Correct Answers To This QuestionDokument54 SeitenC - TS4CO - 2021: There Are 2 Correct Answers To This QuestionHclementeNoch keine Bewertungen
- KST SafeOperation 35 enDokument289 SeitenKST SafeOperation 35 enMircoNoch keine Bewertungen
- Kuka How TODokument14 SeitenKuka How TOStefan Ristevski100% (1)
- KUKA KRC2 Ed05 SafeRobot PDFDokument108 SeitenKUKA KRC2 Ed05 SafeRobot PDFAnonymous MpAOJYNkNoch keine Bewertungen
- Kuka Robot Sensor InterfaceDokument85 SeitenKuka Robot Sensor InterfaceElbari Omar100% (1)
- User Manual For The Kuka Krc4 Hex Sensor Kit E9 enDokument31 SeitenUser Manual For The Kuka Krc4 Hex Sensor Kit E9 enMuntean VladNoch keine Bewertungen
- sbm2 DC Achse 7 8 enDokument27 Seitensbm2 DC Achse 7 8 enDenisNoch keine Bewertungen
- KUKA ServicePlug PDFDokument33 SeitenKUKA ServicePlug PDFAnatoliiNoch keine Bewertungen
- ArcTechDigital 23 Operación enDokument50 SeitenArcTechDigital 23 Operación enberkay dogan100% (1)
- Krc2 Pci ModemDokument12 SeitenKrc2 Pci Modemtazba009Noch keine Bewertungen
- KST ServoGun Basic 30 en PDFDokument210 SeitenKST ServoGun Basic 30 en PDFDavid A. GaribayNoch keine Bewertungen
- 2018 01 10 KRC4 Training enDokument19 Seiten2018 01 10 KRC4 Training enMário CoutoNoch keine Bewertungen
- Kuka System SoftwareDokument43 SeitenKuka System SoftwarePablo Andrés Sanhueza CarvajalNoch keine Bewertungen
- World War 2 Soldier Stories - Ryan JenkinsDokument72 SeitenWorld War 2 Soldier Stories - Ryan JenkinsTaharNoch keine Bewertungen
- Tablas Mecanicas KR C2 PDFDokument10 SeitenTablas Mecanicas KR C2 PDFarturoNoch keine Bewertungen
- English Manual KR C4 Extended NA enDokument257 SeitenEnglish Manual KR C4 Extended NA enkuka100% (1)
- KRC2 LPDN Scanner - enDokument28 SeitenKRC2 LPDN Scanner - enoumayma saoudiNoch keine Bewertungen
- Application Manual DeviceNet Master-Slave PDFDokument122 SeitenApplication Manual DeviceNet Master-Slave PDFTonyNoch keine Bewertungen
- Device Net Congiguration PDFDokument51 SeitenDevice Net Congiguration PDFAkshayNoch keine Bewertungen
- krc2 - Ed2005 - Profibus Interface - enDokument12 Seitenkrc2 - Ed2005 - Profibus Interface - enHendra WiratamaNoch keine Bewertungen
- Six Petals of Peace DiscussionDokument10 SeitenSix Petals of Peace Discussionjofel delicana100% (2)
- KST ForceTorqueControl 30 en PDFDokument75 SeitenKST ForceTorqueControl 30 en PDFRoger MorescoNoch keine Bewertungen
- Interface Rob 4000-5000Dokument34 SeitenInterface Rob 4000-5000Bruno GuedesNoch keine Bewertungen
- DM KRL-Setup ManualDokument12 SeitenDM KRL-Setup Manual박종현Noch keine Bewertungen
- 1165 Kuka KR 30 3 Robot Adatlap PDFDokument4 Seiten1165 Kuka KR 30 3 Robot Adatlap PDFRafael González ChacónNoch keine Bewertungen
- KST CR Motion Cooperation 22 enDokument147 SeitenKST CR Motion Cooperation 22 enMindaugas RimkusNoch keine Bewertungen
- KST Ethernet KRL 21 enDokument77 SeitenKST Ethernet KRL 21 enJose Ortiz Merino100% (1)
- Milling Robot 03 enDokument88 SeitenMilling Robot 03 enM12N70% (1)
- KST ServoGun FC 21 enDokument125 SeitenKST ServoGun FC 21 enSergei Kublanov100% (1)
- FD Controller Instruction Manual Palletize Function: 5th EditionDokument112 SeitenFD Controller Instruction Manual Palletize Function: 5th EditionrmlNoch keine Bewertungen
- KR 16 - 2 PDFDokument8 SeitenKR 16 - 2 PDFZabri ZakariaNoch keine Bewertungen
- KST CRArcTech Digital 32 enDokument65 SeitenKST CRArcTech Digital 32 enRodrigo CaldeiraNoch keine Bewertungen
- KRC4 Device Net ConfigurationDokument41 SeitenKRC4 Device Net ConfigurationPatrykNoch keine Bewertungen
- Melfa VisionDokument3 SeitenMelfa VisionTetsusaigaNoch keine Bewertungen
- Spez KR QUANTEC2 en PDFDokument156 SeitenSpez KR QUANTEC2 en PDFdavidNoch keine Bewertungen
- Kuka PB Kleinroboter enDokument16 SeitenKuka PB Kleinroboter enkolosuxNoch keine Bewertungen
- KRC4-Operating Instructions enDokument217 SeitenKRC4-Operating Instructions encabecavil100% (1)
- Additional Axis 3HAC021395-001 RevF enDokument218 SeitenAdditional Axis 3HAC021395-001 RevF enJose VegaNoch keine Bewertungen
- 800 Universal InterfaceDokument95 Seiten800 Universal Interfacetoninho18spNoch keine Bewertungen
- AM BMS Interface Condair 2585295 enDokument80 SeitenAM BMS Interface Condair 2585295 enJavierNoch keine Bewertungen
- Nevion TNS-544Dokument202 SeitenNevion TNS-544lin chushengNoch keine Bewertungen
- Drive DC Reliance Minpak - Plus PDFDokument74 SeitenDrive DC Reliance Minpak - Plus PDFJuan David Ardila TorresNoch keine Bewertungen
- Robot Arc Welding Manual MotomanDokument42 SeitenRobot Arc Welding Manual MotomanAldo SalazarNoch keine Bewertungen
- General Parameters and Settings for GV3000 AC DriveDokument2 SeitenGeneral Parameters and Settings for GV3000 AC DriveJuan David Ardila TorresNoch keine Bewertungen
- Ee-66216015 Interface Ir5000 PDFDokument1 SeiteEe-66216015 Interface Ir5000 PDFJuan David Ardila TorresNoch keine Bewertungen
- pgs95 113 Gemini Servo PARKER PDFDokument19 Seitenpgs95 113 Gemini Servo PARKER PDFJuan David Ardila TorresNoch keine Bewertungen
- 750-346 en PDFDokument164 Seiten750-346 en PDFJuan David Ardila TorresNoch keine Bewertungen
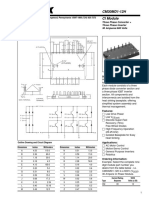
- CM30MD1 12H PDFDokument5 SeitenCM30MD1 12H PDFJuan David Ardila TorresNoch keine Bewertungen
- Yaskawa TM.J7.01Dokument96 SeitenYaskawa TM.J7.01Salvador CrisantosNoch keine Bewertungen
- D2lu6c04 PDFDokument34 SeitenD2lu6c04 PDFJuan David Ardila TorresNoch keine Bewertungen
- Im Sr100a 6 PDFDokument102 SeitenIm Sr100a 6 PDFJuan David Ardila TorresNoch keine Bewertungen
- Commander SE - Advanced User Guide PDFDokument195 SeitenCommander SE - Advanced User Guide PDFJuan David Ardila TorresNoch keine Bewertungen
- Container sizes: 20', 40' dimensions and specificationsDokument3 SeitenContainer sizes: 20', 40' dimensions and specificationsStylefasNoch keine Bewertungen
- GravimetryDokument27 SeitenGravimetrykawadechetan356Noch keine Bewertungen
- Social Responsibility and Ethics in Marketing: Anupreet Kaur MokhaDokument7 SeitenSocial Responsibility and Ethics in Marketing: Anupreet Kaur MokhaVlog With BongNoch keine Bewertungen
- PRI Vs SIP Trunking WPDokument3 SeitenPRI Vs SIP Trunking WPhisham_abdelaleemNoch keine Bewertungen
- Reduce Home Energy Use and Recycling TipsDokument4 SeitenReduce Home Energy Use and Recycling Tipsmin95Noch keine Bewertungen
- Introduction To Competitor AnalysisDokument18 SeitenIntroduction To Competitor AnalysisSrinivas NandikantiNoch keine Bewertungen
- Elliptic FunctionsDokument66 SeitenElliptic FunctionsNshuti Rene FabriceNoch keine Bewertungen
- Study Habits Guide for Busy StudentsDokument18 SeitenStudy Habits Guide for Busy StudentsJoel Alejandro Castro CasaresNoch keine Bewertungen
- TOP 50 Puzzles For IBPS Clerk Mains 2018-19 WWW - Ibpsguide.com PDFDokument33 SeitenTOP 50 Puzzles For IBPS Clerk Mains 2018-19 WWW - Ibpsguide.com PDFHarika VenuNoch keine Bewertungen
- Electric Vehicles PresentationDokument10 SeitenElectric Vehicles PresentationKhagesh JoshNoch keine Bewertungen
- Hand Infection Guide: Felons to Flexor TenosynovitisDokument68 SeitenHand Infection Guide: Felons to Flexor TenosynovitisSuren VishvanathNoch keine Bewertungen
- Theories of LeadershipDokument24 SeitenTheories of Leadershipsija-ekNoch keine Bewertungen
- Brochure - Coming To Work in The Netherlands (2022)Dokument16 SeitenBrochure - Coming To Work in The Netherlands (2022)Tshifhiwa MathivhaNoch keine Bewertungen
- Group Assignment Topics - BEO6500 Economics For ManagementDokument3 SeitenGroup Assignment Topics - BEO6500 Economics For ManagementnoylupNoch keine Bewertungen
- Dwnload Full Marriage and Family The Quest For Intimacy 8th Edition Lauer Test Bank PDFDokument35 SeitenDwnload Full Marriage and Family The Quest For Intimacy 8th Edition Lauer Test Bank PDFrainbow.basque1cpq100% (10)
- Bias in TurnoutDokument2 SeitenBias in TurnoutDardo CurtiNoch keine Bewertungen
- Simple Future Vs Future Continuous Vs Future PerfectDokument6 SeitenSimple Future Vs Future Continuous Vs Future PerfectJocelynNoch keine Bewertungen
- Coursebook 1Dokument84 SeitenCoursebook 1houetofirmin2021Noch keine Bewertungen
- Ivan PavlovDokument55 SeitenIvan PavlovMuhamad Faiz NorasiNoch keine Bewertungen
- Does social media improve or impede communicationDokument3 SeitenDoes social media improve or impede communicationUmar SaleemNoch keine Bewertungen
- Arcmap and PythonDokument29 SeitenArcmap and PythonMiguel AngelNoch keine Bewertungen
- Cell Types: Plant and Animal TissuesDokument40 SeitenCell Types: Plant and Animal TissuesMARY ANN PANGANNoch keine Bewertungen