Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- 577Dokument11 Seiten577Marshal betaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- 00003039Dokument9 Seiten00003039Marshal betaNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Well ScreenDokument18 SeitenWell ScreenMarshal betaNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Rock Properties Lab - PUTDokument97 SeitenRock Properties Lab - PUTMarshal betaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Petroleum Rock and Fluid Properties, Lab Manual - Middle East Technical University PDFDokument77 SeitenPetroleum Rock and Fluid Properties, Lab Manual - Middle East Technical University PDFMarshal betaNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Drilling Engineering Labratory Manual - King FahadDokument98 SeitenDrilling Engineering Labratory Manual - King FahadMarshal betaNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- tmpE0D4 TMPDokument7 SeitentmpE0D4 TMPFrontiersNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Institute of Metallurgy and Materials Engineering Faculty of Chemical and Materials Engineering University of The Punjab LahoreDokument10 SeitenInstitute of Metallurgy and Materials Engineering Faculty of Chemical and Materials Engineering University of The Punjab LahoreMUmairQrNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Travelsinvarious03clar BWDokument522 SeitenTravelsinvarious03clar BWSima Sorin MihailNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- DattadasDokument4 SeitenDattadasJéssica NatáliaNoch keine Bewertungen
- Research Papers On Climate Change Global WarmingDokument4 SeitenResearch Papers On Climate Change Global Warminggw1nm9nbNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- 520l0553 PDFDokument52 Seiten520l0553 PDFVasil TsvetanovNoch keine Bewertungen
- AS-Interface Devices: (Slave Modules)Dokument48 SeitenAS-Interface Devices: (Slave Modules)Muhamad PriyatnaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Static CMOS and Dynamic CircuitsDokument19 SeitenStatic CMOS and Dynamic CircuitsAbhijna MaiyaNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
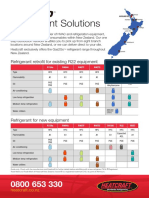
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDokument2 SeitenRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Energy Thesis StatementDokument6 SeitenEnergy Thesis Statementnicoledixonmobile100% (2)
- Kia September 2020 Price List: Picanto ProceedDokument2 SeitenKia September 2020 Price List: Picanto ProceedCaminito MallorcaNoch keine Bewertungen
- LC Magna Leaflet 2019Dokument2 SeitenLC Magna Leaflet 2019saemiNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Sensors & Transducers: (Code: EI 401)Dokument4 SeitenSensors & Transducers: (Code: EI 401)Mayukh BiswasNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Sip Dissertation - Final - Final For CollegeDokument17 SeitenSip Dissertation - Final - Final For Collegevikashirulkar922Noch keine Bewertungen
- HorticultureDokument168 SeitenHorticultureagni sahanaNoch keine Bewertungen
- Alzheimer's Disease Inhalational Alzheimer's Disease An UnrecognizedDokument10 SeitenAlzheimer's Disease Inhalational Alzheimer's Disease An UnrecognizednikoknezNoch keine Bewertungen
- QuestionsDokument6 SeitenQuestionsRomeo martinezNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Planning & Cost Control Engineer (Primavera & MS Project) : Aouache FaridDokument3 SeitenPlanning & Cost Control Engineer (Primavera & MS Project) : Aouache FaridFarid FaridNoch keine Bewertungen
- Ohms LawDokument16 SeitenOhms Lawmpravin kumarNoch keine Bewertungen
- Evaluation of Global Research Trends in The Area of Food Waste D - 2020 - Food CDokument10 SeitenEvaluation of Global Research Trends in The Area of Food Waste D - 2020 - Food CAliNoch keine Bewertungen
- Multilicative ABC IndexDokument6 SeitenMultilicative ABC IndexBalachandranNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Chapter 1 Cumulative Review: Multiple ChoiceDokument2 SeitenChapter 1 Cumulative Review: Multiple ChoiceJ. LeeNoch keine Bewertungen
- Introduction To Second Quantization: 1.1 Single-Particle Hilbert SpaceDokument6 SeitenIntroduction To Second Quantization: 1.1 Single-Particle Hilbert Space김띵Noch keine Bewertungen
- Unit Test 7 (PDF)Dokument1 SeiteUnit Test 7 (PDF)emirelliucNoch keine Bewertungen
- Free Non Veg Nutrition Plan YSF PDFDokument8 SeitenFree Non Veg Nutrition Plan YSF PDFAbhilash Wasekar100% (1)
- The Online Math Open Fall Contest December 4-15, 2020Dokument8 SeitenThe Online Math Open Fall Contest December 4-15, 2020Raghav GoelNoch keine Bewertungen
- Full Download Test Bank For Environmental Economics and Management Theory Policy and Applications 6th Edition Callan PDF Full ChapterDokument27 SeitenFull Download Test Bank For Environmental Economics and Management Theory Policy and Applications 6th Edition Callan PDF Full Chapterscissionrideau941m100% (20)
- Paintings of Juan LunaDokument39 SeitenPaintings of Juan LunaMiss MellowNoch keine Bewertungen
- Research Argumentative EssayDokument6 SeitenResearch Argumentative EssayHoney LabajoNoch keine Bewertungen
- Propagare - Threshold Degradation - AbateriDokument72 SeitenPropagare - Threshold Degradation - AbateriAndrada AdaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)