Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- List of Industries in Mechanical EngineeringDokument3 SeitenList of Industries in Mechanical Engineeringडॉ. कनिष्क शर्माNoch keine Bewertungen
- Jecrc University, Jaipur B.TECH III SEMESTER (END Semester Examination-2017) Mechanical EngineeringDokument9 SeitenJecrc University, Jaipur B.TECH III SEMESTER (END Semester Examination-2017) Mechanical Engineeringडॉ. कनिष्क शर्माNoch keine Bewertungen
- ShellDokument1 SeiteShellडॉ. कनिष्क शर्माNoch keine Bewertungen
- Fea L7Dokument8 SeitenFea L7डॉ. कनिष्क शर्माNoch keine Bewertungen
- MM-II END SemDokument4 SeitenMM-II END Semडॉ. कनिष्क शर्माNoch keine Bewertungen
- Jecrc University, Jaipur B.TECH III SEMESTER (END Semester Examination-2017) Mechanical EngineeringDokument9 SeitenJecrc University, Jaipur B.TECH III SEMESTER (END Semester Examination-2017) Mechanical Engineeringडॉ. कनिष्क शर्माNoch keine Bewertungen
- Characterizing Stress-Strain Transfer in Functionally Graded MaterialsDokument4 SeitenCharacterizing Stress-Strain Transfer in Functionally Graded Materialsडॉ. कनिष्क शर्माNoch keine Bewertungen
- Give The Main Group of Foundry SandDokument2 SeitenGive The Main Group of Foundry Sandडॉ. कनिष्क शर्माNoch keine Bewertungen
- Characterizing Stress-Strain Transfer in Functionally Graded MaterialsDokument4 SeitenCharacterizing Stress-Strain Transfer in Functionally Graded Materialsडॉ. कनिष्क शर्माNoch keine Bewertungen
- Characterizing Stress-Strain Transfer in Functionally Graded MaterialsDokument4 SeitenCharacterizing Stress-Strain Transfer in Functionally Graded Materialsडॉ. कनिष्क शर्माNoch keine Bewertungen
- Database Prefinal ME TPODokument4 SeitenDatabase Prefinal ME TPOडॉ. कनिष्क शर्माNoch keine Bewertungen
- OBE-Assessment Formats MS-XL WorksheetsDokument10 SeitenOBE-Assessment Formats MS-XL Worksheetsडॉ. कनिष्क शर्माNoch keine Bewertungen
- Elastic Bending Analysis of FGM Plate Under Mechanical LoadingDokument10 SeitenElastic Bending Analysis of FGM Plate Under Mechanical Loadingडॉ. कनिष्क शर्माNoch keine Bewertungen
- JECRC M.Tech I Sem Timetable for Mechanical EngineeringDokument1 SeiteJECRC M.Tech I Sem Timetable for Mechanical Engineeringडॉ. कनिष्क शर्माNoch keine Bewertungen
- Solution Mm1 End TermDokument5 SeitenSolution Mm1 End Termडॉ. कनिष्क शर्माNoch keine Bewertungen
- Final Response SheetDokument14 SeitenFinal Response Sheetडॉ. कनिष्क शर्माNoch keine Bewertungen
- Development of Matlab Programme To Study Nonlinear Vibration of A Cantilever BeamDokument8 SeitenDevelopment of Matlab Programme To Study Nonlinear Vibration of A Cantilever BeamIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Elastic Bending Analysis of FGM Plate Under Mechanical LoadingDokument10 SeitenElastic Bending Analysis of FGM Plate Under Mechanical Loadingडॉ. कनिष्क शर्माNoch keine Bewertungen
- Syllabus M.tech MechanicalDokument23 SeitenSyllabus M.tech Mechanicalडॉ. कनिष्क शर्माNoch keine Bewertungen
- 1st in Sem MM-1 (Odd Sem) 2018Dokument2 Seiten1st in Sem MM-1 (Odd Sem) 2018डॉ. कनिष्क शर्माNoch keine Bewertungen
- 1st Mid-Term Question Paper MCQ Ps 5Dokument2 Seiten1st Mid-Term Question Paper MCQ Ps 5डॉ. कनिष्क शर्माNoch keine Bewertungen
- OBE-Assessment Formats MS-XL WorksheetsDokument12 SeitenOBE-Assessment Formats MS-XL WorksheetsArun Pratap Singh0% (1)
- Volume 2 Issue 5 (May - 2015)Dokument1 SeiteVolume 2 Issue 5 (May - 2015)डॉ. कनिष्क शर्माNoch keine Bewertungen
- Project Initial FileDokument4 SeitenProject Initial Fileडॉ. कनिष्क शर्माNoch keine Bewertungen
- An Introduction To Small Wind TurbineDokument11 SeitenAn Introduction To Small Wind TurbineAmlan DasNoch keine Bewertungen
- IEEE PCS Series Book Proposal Template 4 17updateDokument3 SeitenIEEE PCS Series Book Proposal Template 4 17updateडॉ. कनिष्क शर्माNoch keine Bewertungen
- Jaipur National University, JaipurDokument11 SeitenJaipur National University, Jaipurडॉ. कनिष्क शर्माNoch keine Bewertungen
- Inverting Matrices: Determinants and Matrix MultiplicationDokument4 SeitenInverting Matrices: Determinants and Matrix Multiplicationडॉ. कनिष्क शर्माNoch keine Bewertungen
- Nmgiifemintro PDFDokument23 SeitenNmgiifemintro PDFडॉ. कनिष्क शर्माNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
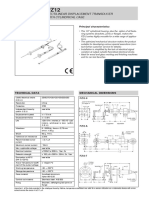
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDokument2 SeitenRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Noch keine Bewertungen
- Numericals - RajasthanUniversity - Papers End Sem ChemDokument20 SeitenNumericals - RajasthanUniversity - Papers End Sem ChemJanmendraNoch keine Bewertungen
- PRC New ShowDokument31 SeitenPRC New ShowxyxyquazNoch keine Bewertungen
- Maintenance of Mining MachineryDokument22 SeitenMaintenance of Mining Machineryjorgeluis2000100% (1)
- Electrical Conductivity of Carbon Blacks Under CompressionDokument7 SeitenElectrical Conductivity of Carbon Blacks Under CompressionМирослав Кузишин100% (1)
- How Does DCPIP WorkDokument3 SeitenHow Does DCPIP WorkIsaac LeeNoch keine Bewertungen
- Aditya and VarahaDokument7 SeitenAditya and VarahaVibhats VibhorNoch keine Bewertungen
- Notes Singly RF BeamDokument5 SeitenNotes Singly RF Beamshivaji_sarvadeNoch keine Bewertungen
- ISO 3354 - 2008 Velocityarea MethodsDokument64 SeitenISO 3354 - 2008 Velocityarea MethodsM.C. Санников0% (1)
- A Low Order System Frequency Response ModelDokument10 SeitenA Low Order System Frequency Response ModelNadil AminNoch keine Bewertungen
- SOAL ElmesDokument16 SeitenSOAL ElmesNurul HanifahNoch keine Bewertungen
- Teknik Menjawab KIMIA 2011Dokument73 SeitenTeknik Menjawab KIMIA 2011Nur HakimNoch keine Bewertungen
- Make a castable lab test mixDokument16 SeitenMake a castable lab test mixthaituan237Noch keine Bewertungen
- Experimental Investigation of Process Parameters On Inconel 925 For EDM Process by Using Taguchi MethodDokument6 SeitenExperimental Investigation of Process Parameters On Inconel 925 For EDM Process by Using Taguchi MethodVishal Kumar JaiswalNoch keine Bewertungen
- 9702 w04 QP 4Dokument16 Seiten9702 w04 QP 4api-3706826Noch keine Bewertungen
- Feasibility of Manufacturing Silt Curtains in IndiaDokument3 SeitenFeasibility of Manufacturing Silt Curtains in IndiaarvindkaushikNoch keine Bewertungen
- MS101 Egypt AssignmentDokument16 SeitenMS101 Egypt Assignmentrofaman100% (5)
- Quick Revision of Bio Phy Che 9 HoursDokument489 SeitenQuick Revision of Bio Phy Che 9 Hourscbsegirlsaipmt100% (2)
- 1 s2.0 0304885395011137 MainDokument2 Seiten1 s2.0 0304885395011137 MainAyush VermaNoch keine Bewertungen
- Physics Grade 11 Gas Laws and WavesDokument6 SeitenPhysics Grade 11 Gas Laws and WavesNatalia WhyteNoch keine Bewertungen
- 1 Electricity Test QuestionsDokument5 Seiten1 Electricity Test QuestionstinoNoch keine Bewertungen
- CNC CONTOUR VALIDATION WITH LASER BALL BARDokument15 SeitenCNC CONTOUR VALIDATION WITH LASER BALL BARNitin DaduNoch keine Bewertungen
- CGN 3421 - Numerical Methods Lecture 3Dokument15 SeitenCGN 3421 - Numerical Methods Lecture 3sori1386Noch keine Bewertungen
- A Fractal Dimension Is A Ratio Providing A Statistical Index of Complexity Comparing How Detail in A PatternDokument1 SeiteA Fractal Dimension Is A Ratio Providing A Statistical Index of Complexity Comparing How Detail in A PatternBaribari BalNoch keine Bewertungen
- Design and Analysis of G+8 Commercial Building Using Staad ProDokument8 SeitenDesign and Analysis of G+8 Commercial Building Using Staad ProVikaskumar ReddyNoch keine Bewertungen
- CO2 Depressurisation OLGADokument8 SeitenCO2 Depressurisation OLGAMaheshNoch keine Bewertungen
- Geometric TolerancesDokument6 SeitenGeometric Tolerancesvaibhavgitevaibhav_9Noch keine Bewertungen
- PID - From Theory To ImplementationDokument5 SeitenPID - From Theory To Implementationvictor-cabral3433Noch keine Bewertungen
- Math 115 HW #9 Solutions PDFDokument7 SeitenMath 115 HW #9 Solutions PDFHyan Gontijo0% (1)