Das könnte Ihnen auch gefallen
- PPP - Homework 2Dokument7 SeitenPPP - Homework 2Wiratha Nungrat100% (2)
- Econometrics Assignment 3Dokument4 SeitenEconometrics Assignment 3Pedro FernandezNoch keine Bewertungen
- Machine Learning Basics: Lecture Slides For Chapter 5 of Deep Learning Ian Goodfellow 2016-09-26Dokument14 SeitenMachine Learning Basics: Lecture Slides For Chapter 5 of Deep Learning Ian Goodfellow 2016-09-26Indra Kelana JayaNoch keine Bewertungen
- Wooldridge 7e Ch09 IMDokument18 SeitenWooldridge 7e Ch09 IMs411077091Noch keine Bewertungen
- TOS General Phsics 1 First QuarterDokument3 SeitenTOS General Phsics 1 First QuarterMichael GabatNoch keine Bewertungen
- Sample Data Analysis and InterpretationDokument20 SeitenSample Data Analysis and InterpretationMac Delvon EriceNoch keine Bewertungen
- BT02Dokument10 SeitenBT02Trang Phạm ThịNoch keine Bewertungen
- Difficult (10%) : Quarter: 3rd Subject: TLE Grade: 9 SectionDokument1 SeiteDifficult (10%) : Quarter: 3rd Subject: TLE Grade: 9 SectionKeith Miko CarpesanoNoch keine Bewertungen
- No. 19 Potential PCA Interpretation Problems For Volatility Smile Dynamics Dimitri Reiswich, Robert TompkinsDokument42 SeitenNo. 19 Potential PCA Interpretation Problems For Volatility Smile Dynamics Dimitri Reiswich, Robert TompkinsS.K. Tony WongNoch keine Bewertungen
- Table of Specs FINALSDokument2 SeitenTable of Specs FINALSNelly CerioNoch keine Bewertungen
- Lord'S Jewels Christian School - Inc Table of Specification Subject/Grade Level: ENGLISH 5 Quarter: Second Quarter Level of PerformanceDokument9 SeitenLord'S Jewels Christian School - Inc Table of Specification Subject/Grade Level: ENGLISH 5 Quarter: Second Quarter Level of PerformanceAbigail DizonNoch keine Bewertungen
- Module 6B Regression - Modelling PossibilitiesDokument62 SeitenModule 6B Regression - Modelling Possibilitiescarolinelouise.bagsik.acctNoch keine Bewertungen
- Peachtree A Complete AnswersDokument5 SeitenPeachtree A Complete AnswersPhilip JosephNoch keine Bewertungen
- LTE Optimization Parameters Rollout ReportDokument10 SeitenLTE Optimization Parameters Rollout ReportMostafa AdelNoch keine Bewertungen
- Cisco Unified Contact Center Express Feature Comparison MatrixDokument8 SeitenCisco Unified Contact Center Express Feature Comparison MatrixJuancho Benz100% (1)
- Analisis Nilai PKKR Xi TKRDokument8 SeitenAnalisis Nilai PKKR Xi TKRLutfi AbdullohNoch keine Bewertungen
- TOS GenMath PrelimDokument1 SeiteTOS GenMath PrelimJesamie Bactol SeriñoNoch keine Bewertungen
- ReportDokument6 SeitenReportapi-459216346Noch keine Bewertungen
- ch11 Kieso IFRS4 SMDokument82 Seitench11 Kieso IFRS4 SM黃炳智Noch keine Bewertungen
- Homclimatol3 A3Dokument8 SeitenHomclimatol3 A3Magaly LujanNoch keine Bewertungen
- ch11 Kieso IFRS4 SMDokument84 Seitench11 Kieso IFRS4 SMBONNoch keine Bewertungen
- 3D Exercise 1018 - 000Dokument1 Seite3D Exercise 1018 - 000Angelo InlongNoch keine Bewertungen
- Tos Gen Math Q2Dokument9 SeitenTos Gen Math Q2Gideon CayogNoch keine Bewertungen
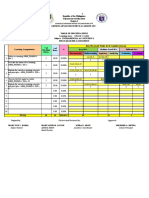
- Republic of The Philippines: For The Provision of Learning Resources (CO Funds)Dokument2 SeitenRepublic of The Philippines: For The Provision of Learning Resources (CO Funds)Janet GabalesNoch keine Bewertungen
- Subject Teacher Senior High Academic Coordinator School Principal Head TeacherDokument7 SeitenSubject Teacher Senior High Academic Coordinator School Principal Head TeacherMICHAELA AQUINONoch keine Bewertungen
- Intermediate Accounting Kieso 13th Edition Solutions ManualDokument24 SeitenIntermediate Accounting Kieso 13th Edition Solutions ManualJasonLewiscpkx100% (27)
- ID 120 Bachelor of Science in Management of Financial Institutions (FIN)Dokument2 SeitenID 120 Bachelor of Science in Management of Financial Institutions (FIN)Aaron HuangNoch keine Bewertungen
- Inverting Operational AmplifierDokument1 SeiteInverting Operational AmplifierArjunJaiNoch keine Bewertungen
- Report General ProficiencyDokument3 SeitenReport General ProficiencyjabirhussainNoch keine Bewertungen
- Chapter 5: Dummy Variables: EAEF Data Set 21 And, Somewhat Surprisingly, It Was Found That Height Had ADokument28 SeitenChapter 5: Dummy Variables: EAEF Data Set 21 And, Somewhat Surprisingly, It Was Found That Height Had AAnonymous sfwNEGxFy2Noch keine Bewertungen
- Answers To Exercises For Chapter 17 INTRODUCTION TO DELAYSDokument35 SeitenAnswers To Exercises For Chapter 17 INTRODUCTION TO DELAYSSuvin NambiarNoch keine Bewertungen
- A Small Note On MM Theory and APVDokument4 SeitenA Small Note On MM Theory and APVChristopherLalbiakniaNoch keine Bewertungen
- Unit 3 Partial and Multiple Correlations: StructureDokument17 SeitenUnit 3 Partial and Multiple Correlations: StructurePochamreddy AshutoshreddyNoch keine Bewertungen
- Unit 3Dokument17 SeitenUnit 3RajeshNoch keine Bewertungen
- TOS in ENGLISH 1 Q4Dokument1 SeiteTOS in ENGLISH 1 Q4hazel.martinNoch keine Bewertungen
- O S F - Bert: M - , E, S B: N The Tability of INE Tuning Iscon Ceptions Xplanations AND Trong AselinesDokument19 SeitenO S F - Bert: M - , E, S B: N The Tability of INE Tuning Iscon Ceptions Xplanations AND Trong AselinessamsNoch keine Bewertungen
- SPR 10 Meta Log FRF Formation Factor CalculatorDokument13 SeitenSPR 10 Meta Log FRF Formation Factor Calculatorpetroleum737Noch keine Bewertungen
- Assignment Classification Table: Topics Brief Exercises Exercises ProblemsDokument95 SeitenAssignment Classification Table: Topics Brief Exercises Exercises ProblemsMtl AndyNoch keine Bewertungen
- PROC LOGISTIC: The Logistics Behind Interpreting Categorical Variable EffectsDokument7 SeitenPROC LOGISTIC: The Logistics Behind Interpreting Categorical Variable EffectsrahulsukhijaNoch keine Bewertungen
- A Presentation On Alibaba Group's Financial Health AnalysisDokument14 SeitenA Presentation On Alibaba Group's Financial Health AnalysisNayeem Ahamed AdorNoch keine Bewertungen
- Table of Specification: Business MathematicsDokument1 SeiteTable of Specification: Business MathematicsJose BenaventeNoch keine Bewertungen
- Final Exam - in Org - and MGT.: (Knowledge & Comprehension) (Application & Analysis) (Synthesis & Evaluation)Dokument3 SeitenFinal Exam - in Org - and MGT.: (Knowledge & Comprehension) (Application & Analysis) (Synthesis & Evaluation)Marissa Golong SilaganNoch keine Bewertungen
- Mervidelle Castro - GradesDokument5 SeitenMervidelle Castro - GradesMervidelleNoch keine Bewertungen
- Jan Kieneth Agbon Tangog Report Card 20181109095657Dokument1 SeiteJan Kieneth Agbon Tangog Report Card 20181109095657Agbon TangogNoch keine Bewertungen
- A6 Regression Challenge ANSWERSDokument6 SeitenA6 Regression Challenge ANSWERSeoip.swdept.mgmtNoch keine Bewertungen
- BMRS Maths Reas StatsDokument574 SeitenBMRS Maths Reas StatsTarun kumar RoyNoch keine Bewertungen
- Md. Jahirul IslamDokument2 SeitenMd. Jahirul IslamMr. JahirNoch keine Bewertungen
- 4th Quarter Exam in English 5Dokument2 Seiten4th Quarter Exam in English 5Jocel LabineNoch keine Bewertungen
- CAInter - COSTING - Paper Analysis... .Dokument8 SeitenCAInter - COSTING - Paper Analysis... .babuvenkatesh566Noch keine Bewertungen
- Tos BesrDokument2 SeitenTos Besrjhonrodge143Noch keine Bewertungen
- AIRCAT2201 Dissection Lyst9711Dokument3 SeitenAIRCAT2201 Dissection Lyst9711Amanpreet SinghNoch keine Bewertungen
- BITWeek7 - L10 - ITE2422 V1Dokument11 SeitenBITWeek7 - L10 - ITE2422 V1Tuan AjreenNoch keine Bewertungen
- Chem r3p0rtDokument5 SeitenChem r3p0rtDonghyuck ReyesNoch keine Bewertungen
- Two Way Tos S.Y. 2022 2023Dokument5 SeitenTwo Way Tos S.Y. 2022 2023Marfe MontelibanoNoch keine Bewertungen
- q3 Lesson 1 Limits of Algebraic FunctionDokument22 Seitenq3 Lesson 1 Limits of Algebraic FunctionalexalorchaNoch keine Bewertungen
- Activity 1 Hyetographs and Cumulative Precipitation JANINEDokument2 SeitenActivity 1 Hyetographs and Cumulative Precipitation JANINEJB RSNJNNoch keine Bewertungen
- Superloss: A Generic Loss For Robust Curriculum LearningDokument12 SeitenSuperloss: A Generic Loss For Robust Curriculum LearningTony LeeNoch keine Bewertungen
- 4.5.18w - Speed, Acceleration and Roller Coasters - Acceleration Graphs Worksheet - MRitchey - 070813Dokument1 Seite4.5.18w - Speed, Acceleration and Roller Coasters - Acceleration Graphs Worksheet - MRitchey - 070813Yuni WijayantiNoch keine Bewertungen
- Group 1 ResultDokument10 SeitenGroup 1 ResultChelwin Glenn Pelaez AsuncionNoch keine Bewertungen
- Table of Specification Math 9Dokument6 SeitenTable of Specification Math 9Joseph Will SmithNoch keine Bewertungen
- Friendly Wonder Guide Vol 2 TOGAF ® 10 Level 1: TOGAF 10 Level 1 Friendly Wonder Guide, #2Von EverandFriendly Wonder Guide Vol 2 TOGAF ® 10 Level 1: TOGAF 10 Level 1 Friendly Wonder Guide, #2Noch keine Bewertungen
- MBA-015 Business StatisticsDokument7 SeitenMBA-015 Business StatisticsA170690Noch keine Bewertungen
- The Cybernetic Bayesian Brain: Anil K. SethDokument51 SeitenThe Cybernetic Bayesian Brain: Anil K. SethDarkwispNoch keine Bewertungen
- Analisis DataDokument11 SeitenAnalisis DataRizky NovitasariNoch keine Bewertungen
- WikipediaDokument29 SeitenWikipediaradhakodirekka8732Noch keine Bewertungen
- Silabus AACSB-S1 - Analitik Bisnis - Gasal 18-19Dokument5 SeitenSilabus AACSB-S1 - Analitik Bisnis - Gasal 18-19Hadila Franciska StevanyNoch keine Bewertungen
- Time Series ForecastingDokument7 SeitenTime Series ForecastingNamratha DesaiNoch keine Bewertungen
- Practice With The Null and Alternative HypothesesDokument3 SeitenPractice With The Null and Alternative HypothesesOnil PagutayaoNoch keine Bewertungen
- Forecasting Learning ObjectivesDokument25 SeitenForecasting Learning ObjectivesMay Ann Agcang SabelloNoch keine Bewertungen
- Probability and SamplingDokument20 SeitenProbability and SamplingTsitsi AbigailNoch keine Bewertungen
- Nitro - Quiz 3 Ged102-A13Dokument3 SeitenNitro - Quiz 3 Ged102-A13Eliezer NitroNoch keine Bewertungen
- Original PDF Essential Statistics 2nd Edition by Robert Gould PDFDokument41 SeitenOriginal PDF Essential Statistics 2nd Edition by Robert Gould PDFmary.burklow183100% (32)
- How To Do Trend Analysis in Excel? Trend Analysis in Excel - Part 1 Trend Analysis in Excel - Part 2 Trend Analysis in Excel - Part 3Dokument3 SeitenHow To Do Trend Analysis in Excel? Trend Analysis in Excel - Part 1 Trend Analysis in Excel - Part 2 Trend Analysis in Excel - Part 3Pritam JanaNoch keine Bewertungen
- MulticollinearityDokument25 SeitenMulticollinearityDushyant MudgalNoch keine Bewertungen
- Design of Experiments: Instructor: Engr. Ambreen TajammalDokument77 SeitenDesign of Experiments: Instructor: Engr. Ambreen TajammalAmbreen TajammalNoch keine Bewertungen
- Unit IV. Inferential Statistics: A. T-Test B. Analysis of Variance (ANOVA) C. Chi-SquareDokument26 SeitenUnit IV. Inferential Statistics: A. T-Test B. Analysis of Variance (ANOVA) C. Chi-SquareDave ReyesNoch keine Bewertungen
- MIT18 05S14 Class27-SlidesDokument48 SeitenMIT18 05S14 Class27-SlidesYuvraj WaleNoch keine Bewertungen
- 0801 HypothesisTestsDokument4 Seiten0801 HypothesisTestsshweta3547Noch keine Bewertungen
- Hypothesis TestingDokument38 SeitenHypothesis TestingGabriel NagyNoch keine Bewertungen
- T TestDokument35 SeitenT TestKarthiga RavichandranNoch keine Bewertungen
- Testing Normality Using R/R-Studio: Dean, FCM, BPSMV, Khanpur Kalan, Sonipat, HaryanaDokument9 SeitenTesting Normality Using R/R-Studio: Dean, FCM, BPSMV, Khanpur Kalan, Sonipat, HaryanaSakshi RelanNoch keine Bewertungen
- 12 Chi As 2-1Dokument33 Seiten12 Chi As 2-1ramNoch keine Bewertungen
- Language of HPDokument46 SeitenLanguage of HPAlbert BunoanNoch keine Bewertungen
- Decision AnalysisDokument94 SeitenDecision AnalysisPartha PPPNoch keine Bewertungen
- StatisticsDokument4 SeitenStatisticsAmir VahdaniNoch keine Bewertungen
- ECON 230 Spring 2022-23 Course OutlineDokument3 SeitenECON 230 Spring 2022-23 Course OutlineEmaanNoch keine Bewertungen
- FMD PRACTICAL FILEDokument61 SeitenFMD PRACTICAL FILEMuskan AroraNoch keine Bewertungen
- 06 Statistical InferenceDokument60 Seiten06 Statistical InferenceNirmala ShindeNoch keine Bewertungen
- Lab ManualDokument4 SeitenLab ManualRufaelNoch keine Bewertungen