Das könnte Ihnen auch gefallen
- (Mod) (TD) SinusmaticDokument4 Seiten(Mod) (TD) SinusmaticAbdEl Bàriisti100% (1)
- PFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFDokument98 SeitenPFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFMouad BotteNoch keine Bewertungen
- Vérin de Sertissage Actions Pression Et RessortDokument3 SeitenVérin de Sertissage Actions Pression Et RessortNelly Paganessi0% (2)
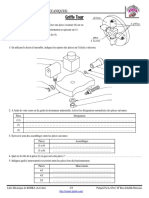
- Griffe de Tour PDFDokument3 SeitenGriffe de Tour PDFAdramé AdraméNoch keine Bewertungen
- 9206 Taillage Engrenages Sans Generation EnspsDokument7 Seiten9206 Taillage Engrenages Sans Generation EnspsCharaf Leo0% (1)
- TD: Optimisation Topologique Guidée D'un Cadre de Vélo: Fabbrication AdditiveDokument8 SeitenTD: Optimisation Topologique Guidée D'un Cadre de Vélo: Fabbrication AdditiveLaila Azzouzi100% (1)
- Chaines de Cotes - Exercices - 2Dokument4 SeitenChaines de Cotes - Exercices - 2Ameni Khaled100% (1)
- TD CompresseurDokument7 SeitenTD CompresseurNaoufel FaresNoch keine Bewertungen
- Guidage en TranslationDokument5 SeitenGuidage en TranslationAVEGUENoch keine Bewertungen
- TheseDokument297 SeitenTheseYanis KemounNoch keine Bewertungen
- Ds 2 15-16Dokument4 SeitenDs 2 15-16Otman Oto100% (1)
- ANNEXEDokument12 SeitenANNEXENaoufel FaresNoch keine Bewertungen
- 2 Principe de ProgrammationDokument3 Seiten2 Principe de ProgrammationMido Si CherniNoch keine Bewertungen
- Liaison Glissiere ExempleDokument2 SeitenLiaison Glissiere ExempleGhada MouedhenNoch keine Bewertungen
- Chap2 Leçon2 3&4Dokument52 SeitenChap2 Leçon2 3&4Guiliass100% (2)
- 2 Encastrement Cours PDFDokument7 Seiten2 Encastrement Cours PDFLarbi ElbakkaliNoch keine Bewertungen
- Fabrication Productique FINAL PDFDokument76 SeitenFabrication Productique FINAL PDFHemza HarNoch keine Bewertungen
- Rapport BE1Dokument51 SeitenRapport BE1ahmed017100% (1)
- Tableau Des Shemas MecaniquesDokument1 SeiteTableau Des Shemas MecaniquesntabNoch keine Bewertungen
- Accouplements, Embrayages, FreinsDokument16 SeitenAccouplements, Embrayages, FreinsZakariaBenNoch keine Bewertungen
- Fonction AssemblageDokument4 SeitenFonction AssemblageElafif Hamdi100% (1)
- Exercice Sur La Programmation Iso G90-CorrigeDokument1 SeiteExercice Sur La Programmation Iso G90-CorrigekhocineNoch keine Bewertungen
- Analyse FonctionnelleDokument3 SeitenAnalyse FonctionnelleYoussef YouriNoch keine Bewertungen
- 1306 160 p32 PDFDokument12 Seiten1306 160 p32 PDFMohamed Amine SaadaNoch keine Bewertungen
- Utilisation Du Logiciel CATIA V5 La Pièce CoudéeDokument13 SeitenUtilisation Du Logiciel CATIA V5 La Pièce CoudéeAymane Elfinou IINoch keine Bewertungen
- CPAV-Ex2 Emb-Frein PDFDokument5 SeitenCPAV-Ex2 Emb-Frein PDFHanane TounsiNoch keine Bewertungen
- Unite Transmettre 1 STE Partie 1 PDFDokument68 SeitenUnite Transmettre 1 STE Partie 1 PDFyassine22Noch keine Bewertungen
- Cm-Modelisation Des Liaisons MecaniqueDokument11 SeitenCm-Modelisation Des Liaisons MecaniqueYosso YohannNoch keine Bewertungen
- AccouplementDokument32 SeitenAccouplementTimo ShmittNoch keine Bewertungen
- app6-STE-STM-SMB - Destribution de Tubes - RepDokument10 Seitenapp6-STE-STM-SMB - Destribution de Tubes - RepTouriya MoukhlesNoch keine Bewertungen
- TheseDokument165 SeitenTheseFayçal MahieddineNoch keine Bewertungen
- Contarainte D'antérioritéDokument16 SeitenContarainte D'antérioritéMajed NesrineNoch keine Bewertungen
- Cahier Meca 4 ST 1Dokument10 SeitenCahier Meca 4 ST 1Ibrahima DiopNoch keine Bewertungen
- Table Couliss1Dokument1 SeiteTable Couliss1Mahrez ZaafouriNoch keine Bewertungen
- Chapitre 1 - Procédé de FabricationDokument10 SeitenChapitre 1 - Procédé de Fabricationالسعيد بوحملةNoch keine Bewertungen
- TP Flexion 2Dokument3 SeitenTP Flexion 2Mrnadhir MecaniqueNoch keine Bewertungen
- TD Elaboration Des Gammes PDFDokument9 SeitenTD Elaboration Des Gammes PDFMehdi Billah ouassimNoch keine Bewertungen
- M21 Marocetude - Com Mathematiques Et Mecanique appliquee-FM-TSMFMDokument63 SeitenM21 Marocetude - Com Mathematiques Et Mecanique appliquee-FM-TSMFMNoureddine MansourNoch keine Bewertungen
- Exam Ratt Forge 18 MinDokument2 SeitenExam Ratt Forge 18 Minfsd vxxs100% (1)
- Le Contrôle GéométriqueDokument7 SeitenLe Contrôle GéométriqueNS ADNoch keine Bewertungen
- GM 2Dokument39 SeitenGM 2Youcef MimouniNoch keine Bewertungen
- Mémoire GODONOU Toundé AristideDokument153 SeitenMémoire GODONOU Toundé Aristideboukenkerol46Noch keine Bewertungen
- SolidworksDokument20 SeitenSolidworksAhmed AndolsiNoch keine Bewertungen
- A25 Dessin Densemble Scie Sauteuse - Doc Eleve A Completer - Les CoupesDokument1 SeiteA25 Dessin Densemble Scie Sauteuse - Doc Eleve A Completer - Les CoupesStef TfhNoch keine Bewertungen
- Correction EX3Dokument14 SeitenCorrection EX3Nizar FerjaouiNoch keine Bewertungen
- Fabrication Par UsinageDokument47 SeitenFabrication Par Usinageluis100% (1)
- 2-Devoir de Controle N1-2AS-2021.31Dokument4 Seiten2-Devoir de Controle N1-2AS-2021.31Youssef Aouadi100% (1)
- TD 4 Loi Entrée Sortie Par Fermeture CinématiqueDokument2 SeitenTD 4 Loi Entrée Sortie Par Fermeture CinématiqueAb DouNoch keine Bewertungen
- Ptv-Roue À GorgeDokument5 SeitenPtv-Roue À Gorgeadem bengharsaNoch keine Bewertungen
- UGV ModelisationDokument96 SeitenUGV ModelisationBouallegue MounirNoch keine Bewertungen
- 11720120710161753Dokument9 Seiten11720120710161753Youssef Ben KhemisNoch keine Bewertungen
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDokument5 SeitenDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Brochage TaillageDokument15 SeitenBrochage TaillageIsaila Daniel100% (1)
- Chap4 - Systeme D Alimentation v2017Dokument39 SeitenChap4 - Systeme D Alimentation v2017Bouthayna HajjiNoch keine Bewertungen
- Devoir de Controle N3-1AS-2014-Blocage Des TubesDokument3 SeitenDevoir de Controle N3-1AS-2014-Blocage Des TubesomatrNoch keine Bewertungen
- TD 30 - Représentation D'une Fonction Logique PDFDokument4 SeitenTD 30 - Représentation D'une Fonction Logique PDFbhs channelNoch keine Bewertungen
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesVon EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNoch keine Bewertungen
- La théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Von EverandLa théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Noch keine Bewertungen
- Catalogue FR FevriDokument67 SeitenCatalogue FR FevriSaid ElmssNoch keine Bewertungen
- 210.a0 - Techniques de LaboratoireDokument188 Seiten210.a0 - Techniques de LaboratoireAmdjed Bahaa67% (3)
- Socialisation CulturalismeDokument2 SeitenSocialisation CulturalismeBelka HadjerNoch keine Bewertungen
- Gerard Figari - Evaluer - Quel Referentiel PDFDokument194 SeitenGerard Figari - Evaluer - Quel Referentiel PDFMohamed Aboufaras100% (1)
- Admission À Sciences Po en Master Ou en Double Diplôme - Récapitulatif PDFDokument10 SeitenAdmission À Sciences Po en Master Ou en Double Diplôme - Récapitulatif PDFBernard Boris BELOBONoch keine Bewertungen
- Le Cadre Théorique de La RechercheDokument6 SeitenLe Cadre Théorique de La RechercheReniteau JeanNoch keine Bewertungen
- Fathallah Maha LettreDokument1 SeiteFathallah Maha LettreWael HALILANoch keine Bewertungen
- 17 Fonctions Convexes ChapitreDokument14 Seiten17 Fonctions Convexes ChapitreOussama McNoch keine Bewertungen
- Gestion Du Travail D'inspectionDokument31 SeitenGestion Du Travail D'inspectionShamss Boucli Hacen100% (1)
- Fiche Laborantin FR PDFDokument6 SeitenFiche Laborantin FR PDFAhmed ZiyadNoch keine Bewertungen
- Pfe Mouna LamiaDokument210 SeitenPfe Mouna LamiaTech&skills EngeneeringNoch keine Bewertungen
- Avis de Thèse-2ème Année-2017 PDFDokument2 SeitenAvis de Thèse-2ème Année-2017 PDFHasibKaabiNoch keine Bewertungen
- Elements D'anatomie Topographique Pour Le Futur Chirurgien Dentiste 2016Dokument141 SeitenElements D'anatomie Topographique Pour Le Futur Chirurgien Dentiste 2016janvier_89Noch keine Bewertungen