Das könnte Ihnen auch gefallen
- Outstanding 12m Bus DrivelineDokument2 SeitenOutstanding 12m Bus DrivelineArshad ShaikhNoch keine Bewertungen
- Advanced High-School - David B. SurowskiDokument435 SeitenAdvanced High-School - David B. SurowskiSanotestNoch keine Bewertungen
- Turbomachinery Centrifugal Compressors: Class 13Dokument70 SeitenTurbomachinery Centrifugal Compressors: Class 13Manoj BaishyaNoch keine Bewertungen
- Carbapenamses in Antibiotic ResistanceDokument53 SeitenCarbapenamses in Antibiotic Resistancetummalapalli venkateswara raoNoch keine Bewertungen
- 221640main EDC Spacecraft StructuresDokument78 Seiten221640main EDC Spacecraft StructuresTufel NooraniNoch keine Bewertungen
- Conic Sections PDFDokument95 SeitenConic Sections PDFManoj Baishya100% (1)
- Fabm2 q2 Module 4 TaxationDokument17 SeitenFabm2 q2 Module 4 TaxationLady HaraNoch keine Bewertungen
- Case Presentation - Bipolar Affective Disorder 2Dokument73 SeitenCase Presentation - Bipolar Affective Disorder 2Hemant's galaxy All is hereNoch keine Bewertungen
- 1.8 Similarity Transformations 15Dokument15 Seiten1.8 Similarity Transformations 15Mae RohNoch keine Bewertungen
- PART1Dokument27 SeitenPART1Angelito MogollonNoch keine Bewertungen
- Introduction to Galois Theory of Linear Differential EquationsDokument82 SeitenIntroduction to Galois Theory of Linear Differential EquationsIsmael HuertaNoch keine Bewertungen
- 20 Some Properties of Eigenvalues and EigenvectorsDokument9 Seiten20 Some Properties of Eigenvalues and EigenvectorsAnilSinghNoch keine Bewertungen
- Assignment 11 Answers Math 130 Linear AlgebraDokument3 SeitenAssignment 11 Answers Math 130 Linear AlgebraCody SageNoch keine Bewertungen
- 19 Eigenvalues, Eigenvectors, Ordinary Differential Equations, and ControlDokument12 Seiten19 Eigenvalues, Eigenvectors, Ordinary Differential Equations, and ControljackkelthorNoch keine Bewertungen
- Exam3 SolDokument6 SeitenExam3 Soldouble KNoch keine Bewertungen
- Phase Plane AnalysisDokument10 SeitenPhase Plane AnalysisildmgzalNoch keine Bewertungen
- JordanDokument5 SeitenJordanSnehasis MukhopadhyayNoch keine Bewertungen
- Joseph BreenDokument9 SeitenJoseph BreenArchana MeenaNoch keine Bewertungen
- Chapter FiveDokument28 SeitenChapter FiveZy AnNoch keine Bewertungen
- Eigenvalues and Eigenvectors: 1 2 N I II I I II IDokument2 SeitenEigenvalues and Eigenvectors: 1 2 N I II I I II IB. AnshumanNoch keine Bewertungen
- Chap.5 Eigenvalues EigenvectorsDokument34 SeitenChap.5 Eigenvalues EigenvectorsndarubagusNoch keine Bewertungen
- Subrings of Matrix Rings: 1 Subalgebras Generated by Matric UnitsDokument6 SeitenSubrings of Matrix Rings: 1 Subalgebras Generated by Matric Unitsanon_430154214Noch keine Bewertungen
- Linear Algebra - 1Dokument14 SeitenLinear Algebra - 1Adnan AmerNoch keine Bewertungen
- CH 6Dokument16 SeitenCH 6tareqkh1Noch keine Bewertungen
- Admas University Mathematics Course on Linear AlgebraDokument112 SeitenAdmas University Mathematics Course on Linear AlgebraAwot HaileslassieNoch keine Bewertungen
- Lesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear AlgebraDokument8 SeitenLesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear Algebraarpit sharmaNoch keine Bewertungen
- Linear Algebra and Matrix Theory: Part 4 - Eigenvalues and EigenvectorsDokument8 SeitenLinear Algebra and Matrix Theory: Part 4 - Eigenvalues and EigenvectorscrazynupNoch keine Bewertungen
- Jordan Normal FormDokument9 SeitenJordan Normal FormminhthangbkNoch keine Bewertungen
- M-Iii, 2 Marks (2017-18) - 1Dokument28 SeitenM-Iii, 2 Marks (2017-18) - 1umarfarookshaik786Noch keine Bewertungen
- Positive definite and semidefinite formsDokument8 SeitenPositive definite and semidefinite formsbakra bundiNoch keine Bewertungen
- Lecture # 5 (Ex.3.3+3.5)Dokument5 SeitenLecture # 5 (Ex.3.3+3.5)S Muhammad AssadNoch keine Bewertungen
- Spektralna Teorija 1dfDokument64 SeitenSpektralna Teorija 1dfEmir BahtijarevicNoch keine Bewertungen
- Lect4 2aDokument6 SeitenLect4 2apfrangiNoch keine Bewertungen
- Aljabar Linear Lanjut PDFDokument57 SeitenAljabar Linear Lanjut PDFFiQar Ithang RaqifNoch keine Bewertungen
- Knapp Week 3 ProblemsDokument3 SeitenKnapp Week 3 Problemsyuzurihainori10121996Noch keine Bewertungen
- Lecture Note 01BDokument3 SeitenLecture Note 01BRAJ MEENANoch keine Bewertungen
- Lecture # 7: Eigenvalues, Eigenvectors and Diagonalization Learning OutcomesDokument21 SeitenLecture # 7: Eigenvalues, Eigenvectors and Diagonalization Learning OutcomesAleep YoungBaeNoch keine Bewertungen
- Eigenvalues: Matrices: Geometric InterpretationDokument8 SeitenEigenvalues: Matrices: Geometric InterpretationTu DuongNoch keine Bewertungen
- EigenValuesand EigenVectorsDokument94 SeitenEigenValuesand EigenVectorsHarshini JuluriNoch keine Bewertungen
- Brzozowski Algebraic MethodDokument5 SeitenBrzozowski Algebraic MethodArannya MonzurNoch keine Bewertungen
- Eigenvalues and EigenvectorsDokument23 SeitenEigenvalues and EigenvectorsViorel AdirvaNoch keine Bewertungen
- Math 130A HW3 Selected SolutionsDokument14 SeitenMath 130A HW3 Selected Solutionstouyou68Noch keine Bewertungen
- Ch1-3 DiagonalizationDokument8 SeitenCh1-3 DiagonalizationsempiNoch keine Bewertungen
- The Finite Spectrum of Sturm-Liouville Operator With: δ-InteractionsDokument12 SeitenThe Finite Spectrum of Sturm-Liouville Operator With: δ-InteractionsVelmurugan mNoch keine Bewertungen
- Matrix TheoryDokument5 SeitenMatrix TheorywkchanxxNoch keine Bewertungen
- My Notes For Linear Algebra 987654Dokument33 SeitenMy Notes For Linear Algebra 987654Shah FahadNoch keine Bewertungen
- Finding the Inverse of a Matrix Using Elementary Row OperationsDokument10 SeitenFinding the Inverse of a Matrix Using Elementary Row OperationsAndy OrtizNoch keine Bewertungen
- Matrices, Linear Maps and Linear Equations Problem SetDokument3 SeitenMatrices, Linear Maps and Linear Equations Problem SetEdgardo Jose RearioNoch keine Bewertungen
- Vectors and Matrices, Problem Set 2Dokument3 SeitenVectors and Matrices, Problem Set 2Roy VeseyNoch keine Bewertungen
- Eigen Values & Eigen VectorsDokument34 SeitenEigen Values & Eigen VectorsSNEHA AGRAWALNoch keine Bewertungen
- Eigenvector and Eigenvalue ProjectDokument10 SeitenEigenvector and Eigenvalue ProjectIzzy ConceptsNoch keine Bewertungen
- Solving The Hamiltonian Cycle Problem Using Symbolic DeterminantsDokument12 SeitenSolving The Hamiltonian Cycle Problem Using Symbolic DeterminantsKiet NguyenNoch keine Bewertungen
- MATH 304 Linear Algebra Eigenvalues and Eigenvectors. Characteristic EquationDokument13 SeitenMATH 304 Linear Algebra Eigenvalues and Eigenvectors. Characteristic Equationezat algarroNoch keine Bewertungen
- Mat334 TD7Dokument5 SeitenMat334 TD7jethrotabueNoch keine Bewertungen
- Advanced algorithms explainedDokument188 SeitenAdvanced algorithms explainedyohanes sinagaNoch keine Bewertungen
- Problem Set 6: 2 1 2 1 T 2 T T 2 T 3 TDokument6 SeitenProblem Set 6: 2 1 2 1 T 2 T T 2 T 3 TAkshu AshNoch keine Bewertungen
- Diagonalizing Linear TransformationsDokument4 SeitenDiagonalizing Linear TransformationsPengintaiNoch keine Bewertungen
- Journal of Geometric Mechanics C American Institute of Mathematical Sciences Volume 3, Number 3, September 2011Dokument26 SeitenJournal of Geometric Mechanics C American Institute of Mathematical Sciences Volume 3, Number 3, September 2011drokoxNoch keine Bewertungen
- Repeated EigenvaluesDokument16 SeitenRepeated EigenvaluesSerdar BilgeNoch keine Bewertungen
- Math480/540, TOPICS IN MODERN MATH. What Are Numbers?Dokument41 SeitenMath480/540, TOPICS IN MODERN MATH. What Are Numbers?Jv lovenNoch keine Bewertungen
- Chapter 21Dokument6 SeitenChapter 21manikannanp_ponNoch keine Bewertungen
- MathsDokument137 SeitenMathsDGanesh100% (2)
- Mathematical Treatise On Linear AlgebraDokument7 SeitenMathematical Treatise On Linear AlgebraJonathan MahNoch keine Bewertungen
- Module 4 DiagonalisationDokument35 SeitenModule 4 Diagonalisationaadhilakshmimr2025Noch keine Bewertungen
- Eigenvalue and EigenvectorsDokument8 SeitenEigenvalue and Eigenvectorsmahmood mohammadNoch keine Bewertungen
- Hans Havlicek and Metod Saniga - Vectors, Cyclic Submodules and Projective Spaces Linked With TernionsDokument10 SeitenHans Havlicek and Metod Saniga - Vectors, Cyclic Submodules and Projective Spaces Linked With TernionsJupweNoch keine Bewertungen
- Difference Equations in Normed Spaces: Stability and OscillationsVon EverandDifference Equations in Normed Spaces: Stability and OscillationsNoch keine Bewertungen
- Transmutation and Operator Differential EquationsVon EverandTransmutation and Operator Differential EquationsNoch keine Bewertungen
- Linear AbridgedDokument145 SeitenLinear AbridgedFrancisco BenítezNoch keine Bewertungen
- Introduction To Aerospace Propulsion A Course Under NPTEL-II 1. Introduction To Propulsion (Prof B Roy)Dokument32 SeitenIntroduction To Aerospace Propulsion A Course Under NPTEL-II 1. Introduction To Propulsion (Prof B Roy)Levent ÖnderNoch keine Bewertungen
- Feedback Systems and Feedback Control SystemsDokument12 SeitenFeedback Systems and Feedback Control SystemsManoj BaishyaNoch keine Bewertungen
- C Docume 1 Tempcm 1.007 Locals 1 Temp Plugtmp Plugin-Lo m1-1Dokument1 SeiteC Docume 1 Tempcm 1.007 Locals 1 Temp Plugtmp Plugin-Lo m1-1Karthiik88Noch keine Bewertungen
- Aircraft Performance, Stability and Control with Experiments in FlightDokument8 SeitenAircraft Performance, Stability and Control with Experiments in FlightMohammad AlthafNoch keine Bewertungen
- RotationDokument36 SeitenRotationparashargunjanNoch keine Bewertungen
- Pauls Online Math NotesDokument5 SeitenPauls Online Math NotesManoj BaishyaNoch keine Bewertungen
- C Docume 1 Tempcm 1.007 Locals 1 Temp Plugtmp Plugin-Lo m1-1Dokument1 SeiteC Docume 1 Tempcm 1.007 Locals 1 Temp Plugtmp Plugin-Lo m1-1Karthiik88Noch keine Bewertungen
- Evalue Magic Tricks HandoutDokument14 SeitenEvalue Magic Tricks HandoutPrernaKabtiyalNoch keine Bewertungen
- Structural Mechanics - PDF - 5-12-2018 7 - 38 - 45 PMDokument532 SeitenStructural Mechanics - PDF - 5-12-2018 7 - 38 - 45 PMManoj BaishyaNoch keine Bewertungen
- MechanicsDokument572 SeitenMechanicsManoj BaishyaNoch keine Bewertungen
- MechanicsDokument572 SeitenMechanicsManoj BaishyaNoch keine Bewertungen
- C DOCUME 1 - 8 - LOCALS 1 Temp Plugtmp Plugin-C33jthermodDokument61 SeitenC DOCUME 1 - 8 - LOCALS 1 Temp Plugtmp Plugin-C33jthermode1mcNoch keine Bewertungen
- 2020 - Audcap1 - 2.3 RCCM - BunagDokument1 Seite2020 - Audcap1 - 2.3 RCCM - BunagSherilyn BunagNoch keine Bewertungen
- Nysc Editorial ManifestoDokument2 SeitenNysc Editorial ManifestoSolomon Samuel AdetokunboNoch keine Bewertungen
- Cypress Enable Basic Rer Erence ManualDokument2 SeitenCypress Enable Basic Rer Erence ManualCarlos RodasNoch keine Bewertungen
- PSAII Final EXAMDokument15 SeitenPSAII Final EXAMdaveadeNoch keine Bewertungen
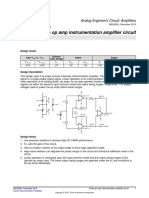
- Opamp TIDokument5 SeitenOpamp TIAmogh Gajaré100% (1)
- Marketing of Agriculture InputsDokument18 SeitenMarketing of Agriculture InputsChanakyaNoch keine Bewertungen
- Theatre Arts I 9 - 12 Grade Beginning Theatre Students: TH THDokument18 SeitenTheatre Arts I 9 - 12 Grade Beginning Theatre Students: TH THAppleSamsonNoch keine Bewertungen
- Wei Et Al 2016Dokument7 SeitenWei Et Al 2016Aline HunoNoch keine Bewertungen
- Fabm1 q3 Mod4 Typesofmajoraccounts FinalDokument25 SeitenFabm1 q3 Mod4 Typesofmajoraccounts FinalClifford FloresNoch keine Bewertungen
- Type of PoemDokument10 SeitenType of PoemYovita SpookieNoch keine Bewertungen
- Modification Adjustment During Upgrade - Software Logistics - SCN WikiDokument4 SeitenModification Adjustment During Upgrade - Software Logistics - SCN Wikipal singhNoch keine Bewertungen
- Verification of First Law V-SonometerDokument3 SeitenVerification of First Law V-SonometerRick astley's microphoneNoch keine Bewertungen
- AIIMS Mental Health Nursing Exam ReviewDokument28 SeitenAIIMS Mental Health Nursing Exam ReviewImraan KhanNoch keine Bewertungen
- Siemens MS 42.0 Engine Control System GuideDokument56 SeitenSiemens MS 42.0 Engine Control System GuideIbnu NugroNoch keine Bewertungen
- Priming An Airplane EngineDokument6 SeitenPriming An Airplane Enginejmoore4678Noch keine Bewertungen
- Experiment Vit CDokument4 SeitenExperiment Vit CinadirahNoch keine Bewertungen
- Case 1 1 Starbucks Going Global FastDokument2 SeitenCase 1 1 Starbucks Going Global FastBoycie TarcaNoch keine Bewertungen
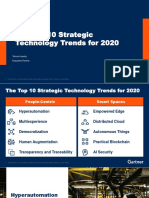
- The Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerDokument31 SeitenThe Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerCarlos Stuars Echeandia CastilloNoch keine Bewertungen
- BE 510 Business Economics 1 Problem Set 5 SolutionsDokument5 SeitenBE 510 Business Economics 1 Problem Set 5 SolutionsCreative Work21stNoch keine Bewertungen
- Case Study - Help DocumentDokument2 SeitenCase Study - Help DocumentRahNoch keine Bewertungen
- IBM Systems Journal PerspectivesDokument24 SeitenIBM Systems Journal PerspectivesSmitha MathewNoch keine Bewertungen
- Sheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMDokument2 SeitenSheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMKhalifa MohamedNoch keine Bewertungen
- Cost Systems: TermsDokument19 SeitenCost Systems: TermsJames BarzoNoch keine Bewertungen
- O - 6 Series Mill Operation Manual-ENDokument119 SeitenO - 6 Series Mill Operation Manual-ENLeonardo OlivaresNoch keine Bewertungen
- AP World History: Islamic Empires and Scientific AdvancementDokument55 SeitenAP World History: Islamic Empires and Scientific AdvancementJa'TasiaNoch keine Bewertungen
- Cisco Lab 2.2.4.3Dokument5 SeitenCisco Lab 2.2.4.3vcx100100% (6)