Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
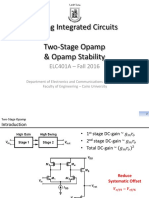
- ELC401AF17 L8 OpampsTwoStageDokument22 SeitenELC401AF17 L8 OpampsTwoStageEslam Asaad MahmoudNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- ELC401AF17 L7 OpampsSingleStageDokument24 SeitenELC401AF17 L7 OpampsSingleStageEslam Asaad MahmoudNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- ELC401AF17 L5 CurrentMirrorsDokument20 SeitenELC401AF17 L5 CurrentMirrorsEslam Asaad MahmoudNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- ELC401AF17 L6 OpampSpecificationsDokument15 SeitenELC401AF17 L6 OpampSpecificationsEslam Asaad MahmoudNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
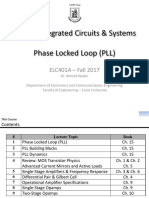
- Elc401af17 l4 PLLDokument17 SeitenElc401af17 l4 PLLEslam Asaad MahmoudNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elc401af17 l1 PLLDokument17 SeitenElc401af17 l1 PLLEslam Asaad MahmoudNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Elc401af17 L2 PLL PDFDokument19 SeitenElc401af17 L2 PLL PDFEslam Asaad MahmoudNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Efectos Del Zoom:: Dinamica y FiltroDokument9 SeitenEfectos Del Zoom:: Dinamica y FiltroMichael Mike Duran MejiaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Wideband Modem ResiliencyDokument18 SeitenWideband Modem ResiliencyPanagiotis PapaspyropoulosNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- Vision Broad BandDokument1 SeiteVision Broad BandWA TRANCE50% (2)
- RS-485 to RS-232 Converter InstructionDokument1 SeiteRS-485 to RS-232 Converter InstructionSeka Vilar SorucoNoch keine Bewertungen
- WLAN NetworkingDokument247 SeitenWLAN NetworkingNazar AzizNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Device MDM DetailDokument3 SeitenDevice MDM DetailDaniel AngelescuNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Learning Material: Electronics Products Assembling and ServicesDokument58 SeitenLearning Material: Electronics Products Assembling and ServicesPatrick Jade De OcampoNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- 29d9b Quanta KL6A Kl6a Dis 45w 1029 PDFDokument47 Seiten29d9b Quanta KL6A Kl6a Dis 45w 1029 PDFivan22okNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Discrete Time Control of A Push-Pull Power Converter - JBO - TFMDokument114 SeitenDiscrete Time Control of A Push-Pull Power Converter - JBO - TFMprajwalNoch keine Bewertungen
- ABB OVR Recloser and PCD Training - Rev FDokument13 SeitenABB OVR Recloser and PCD Training - Rev FChristianM.LeandroYauriNoch keine Bewertungen
- PM Sensor Power Supply Fault DiagnosisDokument5 SeitenPM Sensor Power Supply Fault DiagnosisJoanmanel Sola QuintanaNoch keine Bewertungen
- Alinco DR-138 438 UserDokument41 SeitenAlinco DR-138 438 UserDe JavuNoch keine Bewertungen
- Thermal Performance Evaluation of Carbon Based Material For A Computer Heat Sink Using Finite Element AnalysisDokument137 SeitenThermal Performance Evaluation of Carbon Based Material For A Computer Heat Sink Using Finite Element AnalysisLee Anthony ChingNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- b8 Digi Anywhereusb Plus DsDokument4 Seitenb8 Digi Anywhereusb Plus DsClem CZNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- GeiDokument2 SeitenGeisansureNoch keine Bewertungen
- Zigbee Based Car Security SystemDokument23 SeitenZigbee Based Car Security SystemvijitizerNoch keine Bewertungen
- Mainboard p4845glmDokument34 SeitenMainboard p4845glmHo Thanh BinhNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Effect of Temperature Variations On Solar Cell EfficiencyDokument6 SeitenThe Effect of Temperature Variations On Solar Cell EfficiencyVishal FernandesNoch keine Bewertungen
- Aurora SonataDokument336 SeitenAurora Sonatapepe perezNoch keine Bewertungen
- LTGDokument4 SeitenLTGMohammed AatifNoch keine Bewertungen
- AN1200.28 MCU Requirements For LoRaWAN V3Dokument9 SeitenAN1200.28 MCU Requirements For LoRaWAN V3Arun PrasathNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Mie11142 Scar PDFDokument21 SeitenMie11142 Scar PDFasmir_aganovic8119Noch keine Bewertungen
- Cs 601Dokument23 SeitenCs 601chiNoch keine Bewertungen
- Common Language Location Codes (CLLI™ Codes) Description For Location IdentificationDokument172 SeitenCommon Language Location Codes (CLLI™ Codes) Description For Location IdentificationJS BNoch keine Bewertungen
- Realization of a Planar Low-Profile Broadband Phased Array AntennaDokument120 SeitenRealization of a Planar Low-Profile Broadband Phased Array AntennaCarriceiros TourNoch keine Bewertungen
- DSP Chapter 4 Sampling of Continuous-time SignalsDokument29 SeitenDSP Chapter 4 Sampling of Continuous-time SignalsShah HussainNoch keine Bewertungen
- GC9403 Application Notes Ver04 - 20141206Dokument24 SeitenGC9403 Application Notes Ver04 - 20141206SpecShareNoch keine Bewertungen
- Sarjana Muda Sains (Fizik Gunaan) Dengan Kepujian Bachelor of Science (Applied Physics) With HonoursDokument44 SeitenSarjana Muda Sains (Fizik Gunaan) Dengan Kepujian Bachelor of Science (Applied Physics) With HonoursrahulsinghNoch keine Bewertungen
- MH-MK2 Series Motherboard Replacement Guide: Tools NeededDokument5 SeitenMH-MK2 Series Motherboard Replacement Guide: Tools Neededlaudith22Noch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)