Das könnte Ihnen auch gefallen
- ELC401AF17 L7 OpampsSingleStageDokument24 SeitenELC401AF17 L7 OpampsSingleStageEslam Asaad MahmoudNoch keine Bewertungen
- ELC401AF17 L5 CurrentMirrorsDokument20 SeitenELC401AF17 L5 CurrentMirrorsEslam Asaad MahmoudNoch keine Bewertungen
- ELC401AF17 L6 OpampSpecificationsDokument15 SeitenELC401AF17 L6 OpampSpecificationsEslam Asaad MahmoudNoch keine Bewertungen
- Elc401af17 l4 PLLDokument17 SeitenElc401af17 l4 PLLEslam Asaad MahmoudNoch keine Bewertungen
- Elc401af17 l3 PLLDokument15 SeitenElc401af17 l3 PLLEslam Asaad MahmoudNoch keine Bewertungen
- Elc401af17 L2 PLL PDFDokument19 SeitenElc401af17 L2 PLL PDFEslam Asaad MahmoudNoch keine Bewertungen
- Elc401af17 l1 PLLDokument17 SeitenElc401af17 l1 PLLEslam Asaad MahmoudNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Tesis RekaciptaDokument56 SeitenTesis Rekaciptaatukbelumganyut73% (15)
- II BTECH - I SEM - ECE - EDC - THEORY & QUIZ QUESTIONS - MID 2 - Students PDFDokument19 SeitenII BTECH - I SEM - ECE - EDC - THEORY & QUIZ QUESTIONS - MID 2 - Students PDFK SrinuNoch keine Bewertungen
- Science10 Q2 Mod4 v4Dokument11 SeitenScience10 Q2 Mod4 v4Kim Taehyung100% (1)
- Camera Notes Part 2 For PhotogrammetryDokument90 SeitenCamera Notes Part 2 For PhotogrammetryAnuran GayaliNoch keine Bewertungen
- An Assessment of HF Nvis Radio System Reliability: Dean SumićDokument10 SeitenAn Assessment of HF Nvis Radio System Reliability: Dean Sumićdot16eNoch keine Bewertungen
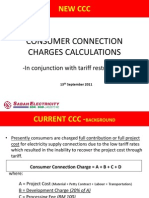
- Sesb CCCDokument49 SeitenSesb CCCEddy O'neal Edwin100% (1)
- Industrial Trainning File Contents 1Dokument7 SeitenIndustrial Trainning File Contents 1mohasan ali50% (2)
- A Dual Nature of LightDokument2 SeitenA Dual Nature of LightRoshdy WaheedNoch keine Bewertungen
- Generation TrainerDokument1 SeiteGeneration TrainerAhsan Ali AhmedNoch keine Bewertungen
- JVC GY-DV500U DV500E Service Training ManualDokument286 SeitenJVC GY-DV500U DV500E Service Training Manualavrelec100% (3)
- Deadtime Amb DesintegracióDokument11 SeitenDeadtime Amb DesintegracióVictor Sender RodríguezNoch keine Bewertungen
- Maco 8 Element Beam ManualDokument8 SeitenMaco 8 Element Beam Manualw8ddwNoch keine Bewertungen
- Sem 3 Module 3Dokument5 SeitenSem 3 Module 3Joshua HernandezNoch keine Bewertungen
- How To Build A Slayer ExciterDokument6 SeitenHow To Build A Slayer ExciterKevin BinnyNoch keine Bewertungen
- Piezo Copolymer Coaxial CableDokument2 SeitenPiezo Copolymer Coaxial CableJose Miguel Madrid ReinaNoch keine Bewertungen
- Cable Sizing ExamplesDokument27 SeitenCable Sizing Examplespartha_gang4526Noch keine Bewertungen
- DatasheetDokument40 SeitenDatasheetjisa technologyNoch keine Bewertungen
- Manual de Operacion Transceiver Vertex 1700Dokument32 SeitenManual de Operacion Transceiver Vertex 1700Fredy Turpo TiconaNoch keine Bewertungen
- Improved-Power Quality Bridgeless - Converter-Based Multiple-Output SmpsDokument11 SeitenImproved-Power Quality Bridgeless - Converter-Based Multiple-Output SmpsKalyan Reddy AnuguNoch keine Bewertungen
- 220kv Phu Tho v6Dokument712 Seiten220kv Phu Tho v6Thanh Tâm100% (1)
- Paper 1 SPM 2005Dokument27 SeitenPaper 1 SPM 2005Rosmini Abdul RahmanNoch keine Bewertungen
- Tegam 2340 - 2350Dokument19 SeitenTegam 2340 - 2350enticoNoch keine Bewertungen
- Surge Impedance Loading (SIL)Dokument2 SeitenSurge Impedance Loading (SIL)Mahmudul HassanNoch keine Bewertungen
- Full CatalogDokument128 SeitenFull CatalogPaul NanceNoch keine Bewertungen
- Microwave Theory and TechniquesDokument599 SeitenMicrowave Theory and Techniquesdhanushcm2001Noch keine Bewertungen
- PE MCQ Unit-IIDokument9 SeitenPE MCQ Unit-IIKalpesh MahajanNoch keine Bewertungen
- DRV 8833Dokument28 SeitenDRV 8833Adrian FlorinNoch keine Bewertungen
- D5-Xi65-L154w18 (VK522)Dokument2 SeitenD5-Xi65-L154w18 (VK522)РоманКочневNoch keine Bewertungen
- Chemistry ReportDokument4 SeitenChemistry ReportDikshaNoch keine Bewertungen
- Three-Phase Sensorless Pump Driver IC A89303: Features and Benefits DescriptionDokument22 SeitenThree-Phase Sensorless Pump Driver IC A89303: Features and Benefits Description박남수Noch keine Bewertungen