Das könnte Ihnen auch gefallen
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Dokument4 SeitenDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Razan KhNoch keine Bewertungen
- Sujet2 - Bride de SerrageDokument4 SeitenSujet2 - Bride de SerrageMohsen Laabidi100% (3)
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Dokument4 SeitenDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Hamza IsksiouiNoch keine Bewertungen
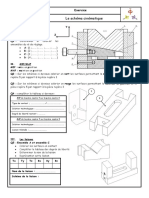
- Schéma Cinématique - 2020Dokument6 SeitenSchéma Cinématique - 2020Mohsen Laabidi100% (1)
- Devoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelDokument4 SeitenDevoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelAnta diama sambe100% (1)
- Liaisons Mécanique2019Dokument4 SeitenLiaisons Mécanique2019Mohsen LaabidiNoch keine Bewertungen
- Devoir de Synthèse N°2 - Technologie - 1ère AS (2012-2013) MR Abdallah RaouafiDokument4 SeitenDevoir de Synthèse N°2 - Technologie - 1ère AS (2012-2013) MR Abdallah RaouafiMounir Ben AouidhaNoch keine Bewertungen
- Correction-Devoir de Controle N3-1AS-2015-etau DE PLOMBIER PDFDokument3 SeitenCorrection-Devoir de Controle N3-1AS-2015-etau DE PLOMBIER PDFYosra Flh60% (10)
- Exercice Schema CinematiqueDokument5 SeitenExercice Schema CinematiqueNadia SahliNoch keine Bewertungen
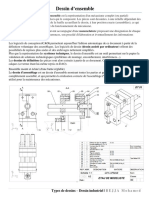
- Déssin D'ensemble2019Dokument3 SeitenDéssin D'ensemble2019Mohsen LaabidiNoch keine Bewertungen
- Dessin de DéfinitionDokument10 SeitenDessin de DéfinitionMohsen Laabidi100% (2)
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiDokument3 SeitenDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiRouaissi Ridha0% (1)
- Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MR BEN AMAR PDFDokument8 SeitenDevoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MR BEN AMAR PDFArfaoui Aymen100% (2)
- 13 - Cours Cotation Fonctionnelle ET Exercices PDFDokument13 Seiten13 - Cours Cotation Fonctionnelle ET Exercices PDFmasteratsii100% (1)
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDokument2 SeitenDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirNoch keine Bewertungen
- Devoir+de+Controle+N3 1AS 2015 Etau+de+PLOMBIERDokument6 SeitenDevoir+de+Controle+N3 1AS 2015 Etau+de+PLOMBIERSlimTbiniNoch keine Bewertungen
- Déssin de DéfinitionDokument4 SeitenDéssin de DéfinitionMohsen Laabidi100% (1)
- Devoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidDokument6 SeitenDevoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidabidmecNoch keine Bewertungen
- 04-Coupes Et Sections-Rep - 2018-2019Dokument14 Seiten04-Coupes Et Sections-Rep - 2018-2019Yahya AIDARANoch keine Bewertungen
- Devoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFDokument5 SeitenDevoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFMohamed B'nNoch keine Bewertungen
- Série D'exercices N°3 - Génie Mécanique - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDokument1 SeiteSérie D'exercices N°3 - Génie Mécanique - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanSelma Seniorita100% (3)
- Liaisonsmcaniques 150227135446 Conversion Gate01Dokument5 SeitenLiaisonsmcaniques 150227135446 Conversion Gate01sedmorabet100% (2)
- TD - Serre Joint PDFDokument5 SeitenTD - Serre Joint PDFDiego David F67% (3)
- Exercice Cotation Fonctionnelle eDokument5 SeitenExercice Cotation Fonctionnelle esarah09112008100% (1)
- Dessin D'ensemble 2019Dokument4 SeitenDessin D'ensemble 2019Mohsen Laabidi100% (1)
- Devoir de Contrôle N°1 - Technologie - Mini-Coupe Tube - 1ère AS (2019-2020) MR KMIMECH AdelDokument4 SeitenDevoir de Contrôle N°1 - Technologie - Mini-Coupe Tube - 1ère AS (2019-2020) MR KMIMECH AdelHamami Aymen100% (1)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Dokument6 SeitenDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- Correction Devoir+de+Controle+N1 2AS 2021 SertisseuseDokument4 SeitenCorrection Devoir+de+Controle+N1 2AS 2021 SertisseuseGuiliassNoch keine Bewertungen
- Devoir de Controle N1-1AS-2021-Serre-TubeDokument6 SeitenDevoir de Controle N1-1AS-2021-Serre-TubeAdam Bensaid100% (1)
- Dessin D'ensembleDokument1 SeiteDessin D'ensembleMohamedBejjaNoch keine Bewertungen
- Enrouleur de RessortDokument5 SeitenEnrouleur de RessortMountaser Bouaoud100% (1)
- Devoir de Controle N: Presse Manuelle À ŒilletsDokument4 SeitenDevoir de Controle N: Presse Manuelle À ŒilletsAdel Kmimech50% (2)
- DESSIN Technique Système V RéglableDokument3 SeitenDESSIN Technique Système V Réglableشمس الأصيل83% (6)
- Dc1 1sec2021 p2Dokument4 SeitenDc1 1sec2021 p2Besbes ZiedNoch keine Bewertungen
- TD3 Dessin Filetages-Taraudages-Vis-EcrousDokument6 SeitenTD3 Dessin Filetages-Taraudages-Vis-EcrousKaoutar alaoui100% (1)
- Devoir de Controle N°2Dokument8 SeitenDevoir de Controle N°2yves100% (2)
- L1-PMI - TP 5 Dessin Industriel 2Dokument4 SeitenL1-PMI - TP 5 Dessin Industriel 2Soufa Ane100% (1)
- Cours - Technologie Dessin de Définition - 2ème Sciences (2014-2015) MR Rafik Ben AmorDokument4 SeitenCours - Technologie Dessin de Définition - 2ème Sciences (2014-2015) MR Rafik Ben AmorsamirNoch keine Bewertungen
- DC1 1AS Casse Noix NOV 2020Dokument4 SeitenDC1 1AS Casse Noix NOV 2020TarekMostapha50% (2)
- Serie Dessin D'ensemble 1Dokument3 SeitenSerie Dessin D'ensemble 1Adam BensaidNoch keine Bewertungen
- CDC Exercices PDFDokument7 SeitenCDC Exercices PDFMohamedBejjaNoch keine Bewertungen
- Act2 (Tendeur de Courroie) P218-224Dokument7 SeitenAct2 (Tendeur de Courroie) P218-224Fatima Zahra AmalouNoch keine Bewertungen
- 8c6rd-Etau de Plombier PDFDokument4 Seiten8c6rd-Etau de Plombier PDFbecem67% (6)
- 2019-2020-DSN°2-1ère-Vé RéglableDokument7 Seiten2019-2020-DSN°2-1ère-Vé RéglableAdam BensaidNoch keine Bewertungen
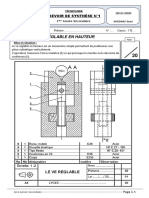
- Vé Reglable en Hauteur-2020Dokument5 SeitenVé Reglable en Hauteur-2020Kamel Tayahi67% (3)
- TD Etau de ModelisteDokument6 SeitenTD Etau de Modelisteattoumii80% (5)
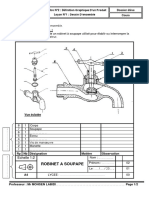
- Dessin de Définition - 2020 - 1SDokument4 SeitenDessin de Définition - 2020 - 1SMourad Laribi100% (3)
- Devoir+de+Synthese+N1 1AS 2019 Serre TubeDokument6 SeitenDevoir+de+Synthese+N1 1AS 2019 Serre TubeKadri Mongi100% (1)
- Etau de ModelisteDokument5 SeitenEtau de Modelisteghgkjh67% (3)
- Dessin de DéfinitionDokument21 SeitenDessin de DéfinitionOuechtati MounirNoch keine Bewertungen
- Devoir de Controle N 3 1 EreaDokument3 SeitenDevoir de Controle N 3 1 Ereakingslim100% (1)
- Correction (Chariot Longitudinal) (Act 2-3)Dokument1 SeiteCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
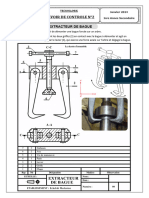
- DC2-2024-Extracteur bague-1ASDokument5 SeitenDC2-2024-Extracteur bague-1ASgmar.ghaziNoch keine Bewertungen
- Technologie: Note: ./20Dokument3 SeitenTechnologie: Note: ./20Marouen MekkiNoch keine Bewertungen
- Chap 4 L5 Symboles Et Mobilité Des LiaisonsDokument38 SeitenChap 4 L5 Symboles Et Mobilité Des LiaisonsAbdel Moula ChoucheneNoch keine Bewertungen
- EXERCICE10Dokument8 SeitenEXERCICE10akouNoch keine Bewertungen
- Les Liaisons Entre SolidesDokument4 SeitenLes Liaisons Entre SolidesChifaa El AttafiNoch keine Bewertungen
- Cours - Technologie Les Liaisons Mécaniqes - 1ère AS (2008-2009) MR AKREMIBECHIR 2Dokument4 SeitenCours - Technologie Les Liaisons Mécaniqes - 1ère AS (2008-2009) MR AKREMIBECHIR 2hsn frkNoch keine Bewertungen
- Houria KessaiDokument43 SeitenHouria KessaiMht Abdallah AbdoulayeNoch keine Bewertungen
- Polygraphes 221115 110703Dokument53 SeitenPolygraphes 221115 110703Zakaria TouyebNoch keine Bewertungen
- Fonction Logique de Base2020 PDFDokument4 SeitenFonction Logique de Base2020 PDFMohsen LaabidiNoch keine Bewertungen
- DC1 2éme 2020Dokument6 SeitenDC1 2éme 2020Mohsen Laabidi100% (1)
- Graphe de Montage Et de DémontageDokument8 SeitenGraphe de Montage Et de DémontageMohsen LaabidiNoch keine Bewertungen
- Liaisons Mécaniques - 2022Dokument2 SeitenLiaisons Mécaniques - 2022Mohsen LaabidiNoch keine Bewertungen
- APPLICATIONS Fonctions Logiques de Base 2021Dokument2 SeitenAPPLICATIONS Fonctions Logiques de Base 2021Mohsen LaabidiNoch keine Bewertungen
- DC1 1ére2 2020Dokument3 SeitenDC1 1ére2 2020Mohsen Laabidi100% (2)
- Dessin de Définition de Corps 2Dokument1 SeiteDessin de Définition de Corps 2Mohsen LaabidiNoch keine Bewertungen
- Énergies RenouvelablesDokument3 SeitenÉnergies RenouvelablesMohsen LaabidiNoch keine Bewertungen
- Système de NumérationDokument4 SeitenSystème de NumérationMohsen LaabidiNoch keine Bewertungen
- Liaisons MécaniquesDokument16 SeitenLiaisons MécaniquesMohsen LaabidiNoch keine Bewertungen
- Chaine D'information PDFDokument9 SeitenChaine D'information PDFMohsen LaabidiNoch keine Bewertungen
- Déssin D'ensemble2020 PDFDokument2 SeitenDéssin D'ensemble2020 PDFMohsen Laabidi50% (2)
- DC1 1ére 2020Dokument4 SeitenDC1 1ére 2020Mohsen Laabidi100% (3)
- Fonction Logique de Base2020Dokument4 SeitenFonction Logique de Base2020Mohsen LaabidiNoch keine Bewertungen
- Analyse Fonctionnelle Interne - Chaine Dinformation Et D'énergie PDFDokument18 SeitenAnalyse Fonctionnelle Interne - Chaine Dinformation Et D'énergie PDFMohsen LaabidiNoch keine Bewertungen
- Cotation Fonctionnelle 2020Dokument6 SeitenCotation Fonctionnelle 2020Mohsen LaabidiNoch keine Bewertungen
- Sujet5 - Dispositif de SerrageDokument6 SeitenSujet5 - Dispositif de SerrageMohsen Laabidi80% (5)
- Système Technique PDFDokument4 SeitenSystème Technique PDFMohsen Laabidi100% (1)
- Système Technique PDFDokument4 SeitenSystème Technique PDFMohsen Laabidi100% (1)
- Analyse Fonctionnelle Externe Final 2020Dokument6 SeitenAnalyse Fonctionnelle Externe Final 2020Mohsen LaabidiNoch keine Bewertungen
- Dessin de DéfinitionDokument10 SeitenDessin de DéfinitionMohsen Laabidi100% (2)
- Lecture D'un Dessin D'ensembleDokument12 SeitenLecture D'un Dessin D'ensembleMohsen Laabidi100% (1)
- Transmission de MVT 2020Dokument8 SeitenTransmission de MVT 2020Mohsen Laabidi100% (5)
- Les Éléments StandarsDokument2 SeitenLes Éléments StandarsMohsen LaabidiNoch keine Bewertungen
- Déssin D'ensemble2019Dokument3 SeitenDéssin D'ensemble2019Mohsen LaabidiNoch keine Bewertungen
- Schéma Cinématique - 2020Dokument4 SeitenSchéma Cinématique - 2020Mohsen LaabidiNoch keine Bewertungen
- Devoir Synthèse n1Dokument6 SeitenDevoir Synthèse n1Mohsen Laabidi100% (1)
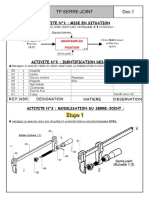
- Modélisation D'un Système Technique Pour ProfDokument2 SeitenModélisation D'un Système Technique Pour ProfMohsen Laabidi100% (8)
- Exercices Synchrones 25487Dokument13 SeitenExercices Synchrones 25487lukaNoch keine Bewertungen
- Notebook MF1442 3Dokument41 SeitenNotebook MF1442 3ScribdTranslationsNoch keine Bewertungen
- Horaires Aleop 312 1-9-2023 Au 28-6-2024 PDFDokument7 SeitenHoraires Aleop 312 1-9-2023 Au 28-6-2024 PDFtitouanmacheferNoch keine Bewertungen
- Rapport Sur COMPTABILITÉ MAROCAINE COMPTABILISATION DES ÉCARTS DE CHANGE.Dokument4 SeitenRapport Sur COMPTABILITÉ MAROCAINE COMPTABILISATION DES ÉCARTS DE CHANGE.MOHAMED El ALAOUINoch keine Bewertungen
- Introduction XMLDokument9 SeitenIntroduction XMLayoubkhNoch keine Bewertungen
- Déclartations Global IS, Acompte IS État Honoraires, AcomptesDokument18 SeitenDéclartations Global IS, Acompte IS État Honoraires, AcomptesItto MohaNoch keine Bewertungen
- MINUSMA-GAO-L-005-20 Assistant Securite-GL-3 - Gao PDFDokument3 SeitenMINUSMA-GAO-L-005-20 Assistant Securite-GL-3 - Gao PDFBoubacar ToureNoch keine Bewertungen
- Chap 6 - Diag de ClassesDokument16 SeitenChap 6 - Diag de ClassesalaesahbouNoch keine Bewertungen
- CA Peut Pas Rater Epub - 6Dokument1 SeiteCA Peut Pas Rater Epub - 6vebokebNoch keine Bewertungen
- S1-4 fONCTIONS CONTINUESDokument2 SeitenS1-4 fONCTIONS CONTINUEST3C GamingNoch keine Bewertungen
- AntidotesDokument9 SeitenAntidotesStradin Bien-aimeNoch keine Bewertungen
- Introduction A La Science PolitiqueDokument5 SeitenIntroduction A La Science PolitiqueHürrem KIPIRTINoch keine Bewertungen
- Le Seigneur Et Ephraïm - Jacob LorberDokument5 SeitenLe Seigneur Et Ephraïm - Jacob Lorberestaran0% (3)
- L'essence Double Du Langage Selon Gilbert HottoisDokument6 SeitenL'essence Double Du Langage Selon Gilbert HottoisRui MascarenhasNoch keine Bewertungen
- Compte Rendu - at CAO Elec S2Dokument36 SeitenCompte Rendu - at CAO Elec S2boukariNoch keine Bewertungen
- 013 Les Paraboles de Jesus en Saint LucDokument4 Seiten013 Les Paraboles de Jesus en Saint LucDr. Prevot Chirac BATSINDILANoch keine Bewertungen
- G120 CU250S2 BA13 0414 FraDokument414 SeitenG120 CU250S2 BA13 0414 Frafernando NOGUEIRANoch keine Bewertungen
- De Lestime de Soi À Lestime Du SoDokument252 SeitenDe Lestime de Soi À Lestime Du Som.rouabhi40Noch keine Bewertungen
- Annexe Archeologie Projet Fevrier 2011Dokument126 SeitenAnnexe Archeologie Projet Fevrier 2011Pierre KinyockNoch keine Bewertungen
- PP Complet BoucettaDokument354 SeitenPP Complet BoucettaRakia BenNoch keine Bewertungen
- Sur Un Air D'offenbachDokument12 SeitenSur Un Air D'offenbachscribdNoch keine Bewertungen
- 0 Guide-Maison-Ind - Neuve - Archi150413 PDFDokument40 Seiten0 Guide-Maison-Ind - Neuve - Archi150413 PDFABELWALIDNoch keine Bewertungen
- Etude de Marche Des FromagesDokument3 SeitenEtude de Marche Des FromagesMeryem Nejma100% (2)
- La Revolution FrancaiseDokument5 SeitenLa Revolution Francaisealehandro ozarNoch keine Bewertungen
- Mission 2004 Comment Accroitre Les Performances Par Un Meilleur ManagementDokument336 SeitenMission 2004 Comment Accroitre Les Performances Par Un Meilleur Managementludtch3321Noch keine Bewertungen
- SupervisionDokument23 SeitenSupervisionFairouz ChkirbenNoch keine Bewertungen
- Liberation - Jeudi 28 Septembre 2017Dokument36 SeitenLiberation - Jeudi 28 Septembre 2017jijeNoch keine Bewertungen
- Bi Grammaire Chapitre 3Dokument30 SeitenBi Grammaire Chapitre 3Oumar SaadouNoch keine Bewertungen
- Maquette Du Master Génie Civil - Master PDFDokument4 SeitenMaquette Du Master Génie Civil - Master PDFMohammed Mammar KouadriNoch keine Bewertungen
- Ballèvre Et Al - 2013 - SGMBDokument93 SeitenBallèvre Et Al - 2013 - SGMBNicolas PetitmagneNoch keine Bewertungen