Das könnte Ihnen auch gefallen
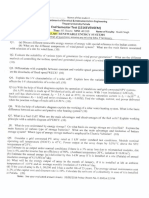
- M.E-PED (2°d, Sem) Time: 03 Hours MM: 40/100 Pee340: Renewable Energy SystemsDokument1 SeiteM.E-PED (2°d, Sem) Time: 03 Hours MM: 40/100 Pee340: Renewable Energy SystemsShrutiPargaiNoch keine Bewertungen
- Ieee Relay Multi PDFDokument10 SeitenIeee Relay Multi PDFShrutiPargaiNoch keine Bewertungen
- PEE340 1sDokument2 SeitenPEE340 1sShrutiPargaiNoch keine Bewertungen
- 193104156Dokument2 Seiten193104156ShrutiPargaiNoch keine Bewertungen
- Second Edition: Optimization For Engineering DesignDokument16 SeitenSecond Edition: Optimization For Engineering DesignShrutiPargaiNoch keine Bewertungen
- Penalty Functions: - The Premise - Quadratic Loss - Problems and SolutionsDokument21 SeitenPenalty Functions: - The Premise - Quadratic Loss - Problems and SolutionsShrutiPargaiNoch keine Bewertungen
- All '/nnitial Weights Are/n' 'Row of W/N' 'Column of W/N': Experiment: To Implement The Hebb'S Rule ProgramDokument1 SeiteAll '/nnitial Weights Are/n' 'Row of W/N' 'Column of W/N': Experiment: To Implement The Hebb'S Rule ProgramShrutiPargaiNoch keine Bewertungen
- Six Week Training Presentation On: Programmable Logic ControllerDokument23 SeitenSix Week Training Presentation On: Programmable Logic ControllerShrutiPargaiNoch keine Bewertungen
- A Training Report On PLC Scada and Automation: Submitted ToDokument47 SeitenA Training Report On PLC Scada and Automation: Submitted ToShrutiPargaiNoch keine Bewertungen
- Power Flow On Ac Transmission LinesDokument36 SeitenPower Flow On Ac Transmission LinesShrutiPargaiNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Chi-Square, Student's T and Snedecor's F DistributionsDokument20 SeitenChi-Square, Student's T and Snedecor's F DistributionsASClabISBNoch keine Bewertungen
- SOP CanadaVisaDokument3 SeitenSOP CanadaVisaVibhu_Arora1150% (2)
- It8711 Foss and Cloud Computing Lab ManualDokument128 SeitenIt8711 Foss and Cloud Computing Lab ManualGayathriNoch keine Bewertungen
- Ram Structural SystemDokument234 SeitenRam Structural Systemlavy100% (1)
- Java Notes-BskDokument85 SeitenJava Notes-BskFayaz SkNoch keine Bewertungen
- Brall 2007Dokument6 SeitenBrall 2007ronaldNoch keine Bewertungen
- BPMN Poster A4 Ver 1.0.10 PDFDokument1 SeiteBPMN Poster A4 Ver 1.0.10 PDFSatrio N. W. NotoamidjojoNoch keine Bewertungen
- Ujian 1 1718 Sem 1Dokument2 SeitenUjian 1 1718 Sem 1Muhammad Haziq TaqiuddinNoch keine Bewertungen
- Cellular Communications (DCS U-6)Dokument22 SeitenCellular Communications (DCS U-6)Mukesh100% (2)
- HEXAWARE TECHNOLOGIES, INC. - People & Company DataDokument550 SeitenHEXAWARE TECHNOLOGIES, INC. - People & Company DataAli ShaikNoch keine Bewertungen
- Piutang CustomerDokument1.031 SeitenPiutang Customeranon_75262887Noch keine Bewertungen
- Objective QuesDokument8 SeitenObjective QuesArun GoyalNoch keine Bewertungen
- Accenture 2019 Cost of Cybercrime Study FinalDokument23 SeitenAccenture 2019 Cost of Cybercrime Study FinalROBERT ALAN LEGUA HERRERANoch keine Bewertungen
- STA - Host Interface ManualDokument84 SeitenSTA - Host Interface Manualjohnatan13Noch keine Bewertungen
- Dell PowerEdge R300Dokument186 SeitenDell PowerEdge R300marathuNoch keine Bewertungen
- Software Development Life Cycle-VDokument3 SeitenSoftware Development Life Cycle-VDeepak Prakash JayaNoch keine Bewertungen
- Limit Queue Tree MikrotikDokument4 SeitenLimit Queue Tree MikrotikRiski Ramadhan FratamaNoch keine Bewertungen
- Poster WAMBADokument1 SeitePoster WAMBAWAMBANoch keine Bewertungen
- AFT Standard ELicense Installation InstructionsDokument11 SeitenAFT Standard ELicense Installation InstructionsMelvin MagbanuaNoch keine Bewertungen
- Videos See Results About: Ph.D. and J.H.F.D. - Poems About Spirituality - ChabadDokument3 SeitenVideos See Results About: Ph.D. and J.H.F.D. - Poems About Spirituality - ChabadAugusto ChiraNoch keine Bewertungen
- 1 Network Lab Assignment1 (CS) New WIN7 LINUX 1Dokument18 Seiten1 Network Lab Assignment1 (CS) New WIN7 LINUX 1MistiNoch keine Bewertungen
- Satellite Image ClassificationDokument13 SeitenSatellite Image ClassificationTejaswi KatragaddaNoch keine Bewertungen
- Mathematics T Trial Paper Semester 2Dokument5 SeitenMathematics T Trial Paper Semester 2Loo Siaw Choon100% (1)
- New Microsoft Office Word DocumentDokument2 SeitenNew Microsoft Office Word Documentvarunft1Noch keine Bewertungen
- Quick Help For EDI SEZ IntegrationDokument2 SeitenQuick Help For EDI SEZ IntegrationsrinivasNoch keine Bewertungen
- Voice Based Mail Attachment For Visually Challenged PeopleDokument5 SeitenVoice Based Mail Attachment For Visually Challenged PeopleravinderreddynNoch keine Bewertungen
- Marine CFD 2005 - 4th International Conference On Marine Hydrodynamics (2005, The Royal Institution of Naval Architects)Dokument549 SeitenMarine CFD 2005 - 4th International Conference On Marine Hydrodynamics (2005, The Royal Institution of Naval Architects)Rogerio GuahyNoch keine Bewertungen
- Leap Bridge OverviewDokument32 SeitenLeap Bridge OverviewMahesh MohanNoch keine Bewertungen
- Optimization & Operational Research: First Part: Guillaume MetzlerDokument106 SeitenOptimization & Operational Research: First Part: Guillaume MetzlervothiquynhyenNoch keine Bewertungen