Das könnte Ihnen auch gefallen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Measurement: Gabriel Rojas-Due Nas, Jordi Roger Riba, Manuel Moreno-EguilazDokument8 SeitenMeasurement: Gabriel Rojas-Due Nas, Jordi Roger Riba, Manuel Moreno-EguilazHarshal VaidyaNoch keine Bewertungen
- Thermal Power Plant Block Diagram - Thermal Power Generation Station-All Students World - All Students WorldDokument14 SeitenThermal Power Plant Block Diagram - Thermal Power Generation Station-All Students World - All Students WorldHarshal VaidyaNoch keine Bewertungen
- Hegazy 2011Dokument7 SeitenHegazy 2011Harshal VaidyaNoch keine Bewertungen
- Img 20231123 Wa0000Dokument1 SeiteImg 20231123 Wa0000Harshal VaidyaNoch keine Bewertungen
- Characte Ve9 PDFDokument1 SeiteCharacte Ve9 PDFHarshal VaidyaNoch keine Bewertungen
- Bloom's Taxonomy - WikipediaDokument10 SeitenBloom's Taxonomy - WikipediaHarshal VaidyaNoch keine Bewertungen
- Bloom's Taxonomy of QuestionsDokument5 SeitenBloom's Taxonomy of QuestionsHarshal VaidyaNoch keine Bewertungen
- Bloom's Taxonomy - The Affective DomainDokument6 SeitenBloom's Taxonomy - The Affective DomainHarshal VaidyaNoch keine Bewertungen
- Benjamin Bloom's Taxonomy of Educational ObjectivesDokument3 SeitenBenjamin Bloom's Taxonomy of Educational ObjectivesHarshal VaidyaNoch keine Bewertungen
- IRF150 Hexfet Transistors JANTX2N6764 THRU-HOLE (TO-204AA/AE) JANTXV2N6764 (REF:MIL-PRF-19500/543) 100V, N-CHANNELDokument7 SeitenIRF150 Hexfet Transistors JANTX2N6764 THRU-HOLE (TO-204AA/AE) JANTXV2N6764 (REF:MIL-PRF-19500/543) 100V, N-CHANNELHarshal VaidyaNoch keine Bewertungen
- INDIAN ELECTRICITY RULES AND INDUSTRIAL SAFETY One Point E & C PDFDokument5 SeitenINDIAN ELECTRICITY RULES AND INDUSTRIAL SAFETY One Point E & C PDFHarshal VaidyaNoch keine Bewertungen
- ME Drives and Control SyllabusDokument34 SeitenME Drives and Control SyllabusHarshal VaidyaNoch keine Bewertungen
- Wireless Charging of Electric Vehicles: Morris KeslerDokument4 SeitenWireless Charging of Electric Vehicles: Morris KeslerHarshal VaidyaNoch keine Bewertungen
- Electrical Engineering PDFDokument40 SeitenElectrical Engineering PDFHarshal Vaidya100% (1)
- 398681Dokument3 Seiten398681Harshal VaidyaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
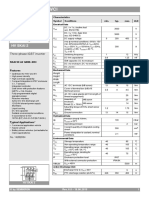
- Skai 90 A2 Gd06-Wci 14282034Dokument12 SeitenSkai 90 A2 Gd06-Wci 14282034nishant_dreamviewerNoch keine Bewertungen
- Project1 Final Paper..solar PDFDokument47 SeitenProject1 Final Paper..solar PDFsatish reddyNoch keine Bewertungen
- Application Note: MicrocontrollersDokument20 SeitenApplication Note: MicrocontrollersAdailton SantosNoch keine Bewertungen
- v2 Led LCD Screen Panel Repair MIRKODokument213 Seitenv2 Led LCD Screen Panel Repair MIRKOErRobert Ch96% (25)
- Product CatalogDokument48 SeitenProduct CatalogSella KumarNoch keine Bewertungen
- Stspin32F0: Advanced BLDC Controller With Embedded STM32 MCUDokument40 SeitenStspin32F0: Advanced BLDC Controller With Embedded STM32 MCUsenopati tresnaNoch keine Bewertungen
- Trinamic Motor Drive ControllerDokument96 SeitenTrinamic Motor Drive Controllerwert1a2Noch keine Bewertungen
- Infineon-Power and Sensing Selection Guide 2019-SG-V00 00-EnDokument308 SeitenInfineon-Power and Sensing Selection Guide 2019-SG-V00 00-EnLuiz Clemente PimentaNoch keine Bewertungen
- MosfetSiC, Info, Grider-Wolfspeed-Cree - GriderDokument46 SeitenMosfetSiC, Info, Grider-Wolfspeed-Cree - GriderManuel SierraNoch keine Bewertungen
- External Gate Resistor Design Guide For Gate Drivers: Mateo Begue, High Power DriversDokument4 SeitenExternal Gate Resistor Design Guide For Gate Drivers: Mateo Begue, High Power Driversselim007Noch keine Bewertungen
- LDokument11 SeitenLkitcha5555Noch keine Bewertungen
- Avago Application Note 1335 - Main Applications and Selection of Gate Driver Optocouplers PDFDokument8 SeitenAvago Application Note 1335 - Main Applications and Selection of Gate Driver Optocouplers PDFFabiano TonnNoch keine Bewertungen
- Datasheet Axiom Control BoardDokument15 SeitenDatasheet Axiom Control BoardZEN ONENoch keine Bewertungen
- IR2153 Parte1Dokument1 SeiteIR2153 Parte1FRANK NIELE DE OLIVEIRANoch keine Bewertungen
- Texas Instrument Gate DriverDokument39 SeitenTexas Instrument Gate Driverdev rajanNoch keine Bewertungen
- Infineon-AN 2022 02 Pulses and Transmission Line theory-ApplicationNotes-v01 00-ENDokument45 SeitenInfineon-AN 2022 02 Pulses and Transmission Line theory-ApplicationNotes-v01 00-ENCesar JakobyNoch keine Bewertungen
- ISL95836 Datasheet - Dual 3+2 PWM Controller - Intersil RenesasDokument33 SeitenISL95836 Datasheet - Dual 3+2 PWM Controller - Intersil RenesasRodrigo BentoNoch keine Bewertungen
- Motor Drive and Control SolutionsDokument49 SeitenMotor Drive and Control SolutionsthietdaucongNoch keine Bewertungen
- PDF Irams10up60b IRFDokument19 SeitenPDF Irams10up60b IRFAndy LNoch keine Bewertungen
- High SideDokument22 SeitenHigh SidesathyaeeeNoch keine Bewertungen
- Ir 2304Dokument8 SeitenIr 2304Rajo AmehNoch keine Bewertungen
- Digital PowerDokument20 SeitenDigital PowerPacebok PacebokNoch keine Bewertungen
- AND9957/D: On Board Charger (OBC) Three-Phase PFC ConverterDokument8 SeitenAND9957/D: On Board Charger (OBC) Three-Phase PFC ConverterluongktdtNoch keine Bewertungen
- PETEssentials 2013Dokument29 SeitenPETEssentials 2013incobarNoch keine Bewertungen
- High Efficiency, Main Power Supply Controller For Notebook ComputersDokument24 SeitenHigh Efficiency, Main Power Supply Controller For Notebook Computersjohn doewrNoch keine Bewertungen
- Development of A High Power Density GaN-based Transistor Low-Voltage High-Current Phase-Shift Full-Bridge Current Doubler Converter For Electric VehiclesDokument6 SeitenDevelopment of A High Power Density GaN-based Transistor Low-Voltage High-Current Phase-Shift Full-Bridge Current Doubler Converter For Electric Vehicles李漢祥Noch keine Bewertungen
- LITIX™ Power Flex TLD5190: Voltage Regulator in Buck-Boost TopologyDokument23 SeitenLITIX™ Power Flex TLD5190: Voltage Regulator in Buck-Boost TopologyManoel Camargo SampaioNoch keine Bewertungen
- Top264-271 Topswitch-Jx Family: Integrated Off-Line Switcher With Ecosmart Technology For Highly Efficient Power SuppliesDokument36 SeitenTop264-271 Topswitch-Jx Family: Integrated Off-Line Switcher With Ecosmart Technology For Highly Efficient Power SuppliesAlex AlexNoch keine Bewertungen
- 10-kW, Three-Level, Three-Phase T-Type Inverter Reference Design For Solar String InvertersDokument38 Seiten10-kW, Three-Level, Three-Phase T-Type Inverter Reference Design For Solar String InvertersJhonatan Leandro Clavijo TrochesNoch keine Bewertungen
- General Description Features: High Precision Low Cost MCM Power SwitchDokument10 SeitenGeneral Description Features: High Precision Low Cost MCM Power SwitchNguyễn TrungNoch keine Bewertungen