Das könnte Ihnen auch gefallen
- Tópicos Capacitación CompusafeDokument1 SeiteTópicos Capacitación CompusafeOscar AbarcaNoch keine Bewertungen
- Limpiar PC Kuan para Uso en Otro CompusafeDokument1 SeiteLimpiar PC Kuan para Uso en Otro CompusafeOscar AbarcaNoch keine Bewertungen
- Calibrar Sensores en P600Dokument3 SeitenCalibrar Sensores en P600Oscar AbarcaNoch keine Bewertungen
- Chile - Programa de BeneficiosDokument29 SeitenChile - Programa de BeneficiosOscar AbarcaNoch keine Bewertungen
- Mundos DescabelladosDokument1 SeiteMundos DescabelladosOscar AbarcaNoch keine Bewertungen
- Preguntas AtmsDokument1 SeitePreguntas AtmsOscar AbarcaNoch keine Bewertungen
- 08.-DIFUSIÓN POLITICA MEDIOAMBIENTAL FirmadoDokument1 Seite08.-DIFUSIÓN POLITICA MEDIOAMBIENTAL FirmadoOscar AbarcaNoch keine Bewertungen
- Manual de Servicio Mazda CX7Dokument1 SeiteManual de Servicio Mazda CX7Oscar Abarca100% (1)
- Manual de Servicio Mazda CX7Dokument1 SeiteManual de Servicio Mazda CX7Oscar AbarcaNoch keine Bewertungen
- Catalogo de Bordados IndusbordDokument18 SeitenCatalogo de Bordados IndusbordOscar AbarcaNoch keine Bewertungen
- Chaqueta CortavientoDokument4 SeitenChaqueta CortavientoOscar AbarcaNoch keine Bewertungen
- Lab 3Dokument20 SeitenLab 3Oscar AbarcaNoch keine Bewertungen
- 2M Guía Teórico Práctica Disoluciones Químicas 5 2Dokument33 Seiten2M Guía Teórico Práctica Disoluciones Químicas 5 2Oscar Abarca100% (1)
- Fullejercicios - Preupdv.cl Rendir-Prueba Taller Prueba Id 3847&CPruebasAlumno 0&confirma SiDokument1 SeiteFullejercicios - Preupdv.cl Rendir-Prueba Taller Prueba Id 3847&CPruebasAlumno 0&confirma SiOscar AbarcaNoch keine Bewertungen
- Libro Mayor de Violeta ParraDokument224 SeitenLibro Mayor de Violeta ParraOscar Abarca100% (3)
- Iniciar Modelo P600Dokument6 SeitenIniciar Modelo P600Oscar AbarcaNoch keine Bewertungen
- Iniciar Modelo P600Dokument6 SeitenIniciar Modelo P600Oscar AbarcaNoch keine Bewertungen
- Evaluaciòn C1 PAPERSDokument2 SeitenEvaluaciòn C1 PAPERSOscar AbarcaNoch keine Bewertungen
- PoemaDokument4 SeitenPoemaOscar AbarcaNoch keine Bewertungen
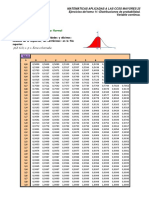
- Dsitribucion Normal PropiedadesDokument6 SeitenDsitribucion Normal PropiedadesOscar AbarcaNoch keine Bewertungen
- Ensayo PSUDokument21 SeitenEnsayo PSUOscar AbarcaNoch keine Bewertungen
- MonomiosDokument3 SeitenMonomiosNullNoch keine Bewertungen
- ALGEBRA LINEA 2011 Det-Rng.-InvDokument3 SeitenALGEBRA LINEA 2011 Det-Rng.-InvLuis EspinNoch keine Bewertungen
- Teoria de Errores Uni PDFDokument32 SeitenTeoria de Errores Uni PDFalessandroNoch keine Bewertungen
- Lasmatematicasenpdf PDFDokument5 SeitenLasmatematicasenpdf PDFgarbouch AbdulNoch keine Bewertungen
- EjercicioDokument5 SeitenEjercicioJuanito JimenezNoch keine Bewertungen
- Guia Solución de Ecuaciones No Lineales 2017Dokument123 SeitenGuia Solución de Ecuaciones No Lineales 2017Anonymous huOlrChPOfNoch keine Bewertungen
- Uso de Variables Binarias para La Formulación de ModelosDokument6 SeitenUso de Variables Binarias para La Formulación de ModelosAngie AbrilNoch keine Bewertungen
- Mat 1101C Tema - 1Dokument2 SeitenMat 1101C Tema - 1David DeelavillaNoch keine Bewertungen
- Taller 2 MN Jorge Iván BabativaDokument3 SeitenTaller 2 MN Jorge Iván BabativaJorge Ivan Babativa CortesNoch keine Bewertungen
- Guia Factorizacion 02Dokument3 SeitenGuia Factorizacion 02Jesu DuránNoch keine Bewertungen
- Clasificación de Los Sistemas de Ecuaciones Lineales y Tipos de SoluciónDokument5 SeitenClasificación de Los Sistemas de Ecuaciones Lineales y Tipos de SoluciónJacke801JeevasNoch keine Bewertungen
- Trigonimetria 4935Dokument44 SeitenTrigonimetria 4935Ruben SernaNoch keine Bewertungen
- S10.s1 - MaterialDokument20 SeitenS10.s1 - MaterialJhonson CanchariNoch keine Bewertungen
- D Repaso Virtual PROPIEDADES DE LOS LIMITESDokument5 SeitenD Repaso Virtual PROPIEDADES DE LOS LIMITESPablo V Arana GNoch keine Bewertungen
- Excel FormulasDokument17 SeitenExcel FormulasCrhiss Inza DNoch keine Bewertungen
- 01 - Referenciales No InercialesDokument4 Seiten01 - Referenciales No Inercialesa4lejandroNoch keine Bewertungen
- TesisDokument78 SeitenTesisjorgeNoch keine Bewertungen
- Foro. Analisis Sobre Los Numeros ComplejosDokument2 SeitenForo. Analisis Sobre Los Numeros ComplejosEduardo Volquez100% (3)
- Tema 2 Módulo Factorización 2023Dokument14 SeitenTema 2 Módulo Factorización 2023YaniNoch keine Bewertungen
- Distribuciones de ProbabilidadDokument51 SeitenDistribuciones de ProbabilidadMartin Cortes Cosme75% (4)
- Analisis de La Perturbaci On de LaDokument224 SeitenAnalisis de La Perturbaci On de LaDalvin Castillo RamirezNoch keine Bewertungen
- Guía No. 1 Inecuaciones Grado 11Dokument5 SeitenGuía No. 1 Inecuaciones Grado 11dulcemarialealmarin782Noch keine Bewertungen
- Calculo de Varias Variables - 2019-Act - T PDFDokument289 SeitenCalculo de Varias Variables - 2019-Act - T PDFJuan Carlos Zapata Torres100% (4)
- Ejercicios Funciones de Varias VariablesDokument2 SeitenEjercicios Funciones de Varias VariablesCarlos A Buriticá HNoch keine Bewertungen
- Tarea #1 Seguimiento #1 Algebra Lineal I 2021 UPBDokument2 SeitenTarea #1 Seguimiento #1 Algebra Lineal I 2021 UPBcaft trujilloNoch keine Bewertungen
- Aracil Gordillo DSDokument36 SeitenAracil Gordillo DSSergio CastilloNoch keine Bewertungen
- Vectores PracticaDokument2 SeitenVectores PracticaRonny Ninaja MamaniNoch keine Bewertungen
- Matemática Tema 21 Semana 21Dokument6 SeitenMatemática Tema 21 Semana 21Fabiola PeñaNoch keine Bewertungen
- Matrices y DeterminantesDokument11 SeitenMatrices y DeterminantesRoger RodriguezNoch keine Bewertungen
- Anotaciones EstadisticaDokument5 SeitenAnotaciones EstadisticaEduardo EspaillatNoch keine Bewertungen