Das könnte Ihnen auch gefallen
- Stationary Tool & Wobj Setting - ABB Robotics User ForumsDokument6 SeitenStationary Tool & Wobj Setting - ABB Robotics User ForumsJose Luis SosaNoch keine Bewertungen
- Drawing Robot 5 Steps With PicturesDokument5 SeitenDrawing Robot 5 Steps With PicturesxiaoboshiNoch keine Bewertungen
- Xc800 App OcdsDokument22 SeitenXc800 App OcdskrrishNoch keine Bewertungen
- FlexiPanels-Advance HMI-FP4 SeriesDokument4 SeitenFlexiPanels-Advance HMI-FP4 SeriesNilesh PathakNoch keine Bewertungen
- Adafruit Minipov3 Kit: Created by Lady AdaDokument50 SeitenAdafruit Minipov3 Kit: Created by Lady AdaMuhammad Sajjad ShadNoch keine Bewertungen
- Hardware UkDokument7 SeitenHardware UkLucian RobNoch keine Bewertungen
- NUTS & VOLT Feb 2017Dokument68 SeitenNUTS & VOLT Feb 2017George J. Pitsakis100% (1)
- Reolink NVR User ManualDokument92 SeitenReolink NVR User Manualalberta.rhossNoch keine Bewertungen
- 4000 600 SeriesDokument242 Seiten4000 600 SeriesNguyễn Tấn BạoNoch keine Bewertungen
- Robosapien Hacking2Dokument3 SeitenRobosapien Hacking2GEORGE KARYDISNoch keine Bewertungen
- Nokia C5-00.2 RM-745 Service Schematics v0.2Dokument10 SeitenNokia C5-00.2 RM-745 Service Schematics v0.2DariusNoch keine Bewertungen
- Robosapienpet'S Supersapien Mod#1 - SapavrDokument7 SeitenRobosapienpet'S Supersapien Mod#1 - SapavrRICHARDNoch keine Bewertungen
- Layout Design Entry, Verification, and Automation User GuideDokument141 SeitenLayout Design Entry, Verification, and Automation User GuidekksundariNoch keine Bewertungen
- Servo Magazine - April 2011-TVDokument84 SeitenServo Magazine - April 2011-TVKarthikeyanKarthikNoch keine Bewertungen
- Controlling Motors Using The Raspberry Pi and Raspirobot Board v2 PDFDokument8 SeitenControlling Motors Using The Raspberry Pi and Raspirobot Board v2 PDFsumi36117Noch keine Bewertungen
- Oscilloscope: TriggerDokument100 SeitenOscilloscope: Triggernegrelli-rnNoch keine Bewertungen
- Robert Faludi - Building Wireless Sensor Networks - With ZigBee, XBee, Arduino, and Processing-O - 'Reilly Media (2010)Dokument10 SeitenRobert Faludi - Building Wireless Sensor Networks - With ZigBee, XBee, Arduino, and Processing-O - 'Reilly Media (2010)TrustWorthy100Noch keine Bewertungen
- Wireless World 1995 06 S OCRDokument92 SeitenWireless World 1995 06 S OCRMilton Nast100% (2)
- IPv6 Deployment in OpenStackDokument51 SeitenIPv6 Deployment in OpenStacksafyh2005Noch keine Bewertungen
- IR Control Via LIRC On Raspberry Pi Zero W - Isaax CampDokument9 SeitenIR Control Via LIRC On Raspberry Pi Zero W - Isaax CampzymebixNoch keine Bewertungen
- Autosens - Tutorial - Autonomous Driving With ROSDokument58 SeitenAutosens - Tutorial - Autonomous Driving With ROSjfrasconNoch keine Bewertungen
- Extending Wi-Fi - AVForumsDokument3 SeitenExtending Wi-Fi - AVForumsjohndo3Noch keine Bewertungen
- Atmel 8051 Microcontroller Family - Product Selection GuideDokument26 SeitenAtmel 8051 Microcontroller Family - Product Selection GuideSo Was RedNoch keine Bewertungen
- ComicRack Manual (5th Ed) PDFDokument179 SeitenComicRack Manual (5th Ed) PDFHennot Do NorteNoch keine Bewertungen
- Accelerate Computing Vision and Image Processing Using VPI 1.1 by Rodolfo LimaDokument23 SeitenAccelerate Computing Vision and Image Processing Using VPI 1.1 by Rodolfo LimaGiancarlo VatalaroNoch keine Bewertungen
- Delta Programmable Logic Controller DVP Series: Automation For A Changing WorldDokument40 SeitenDelta Programmable Logic Controller DVP Series: Automation For A Changing WorldEvandro Souza MeloNoch keine Bewertungen
- ABB Training ReportDokument22 SeitenABB Training Reportthanh_cdt01Noch keine Bewertungen
- RS MachineTending PP 5.091Dokument8 SeitenRS MachineTending PP 5.091bekappodatakaalkatelNoch keine Bewertungen
- IPv6 Cloud DeploymentDokument58 SeitenIPv6 Cloud Deploymentsafyh2005Noch keine Bewertungen
- Archetype Rabea v1.0.0Dokument24 SeitenArchetype Rabea v1.0.0ghjghjghj456Noch keine Bewertungen
- Java Magazine JulyAugust 2017Dokument56 SeitenJava Magazine JulyAugust 2017margashomeNoch keine Bewertungen
- Interfacing TutorialDokument126 SeitenInterfacing Tutorialdrillonit2428Noch keine Bewertungen
- Hbe-Robonova-Ai Ii PDFDokument4 SeitenHbe-Robonova-Ai Ii PDFThichanon RomsaiyudNoch keine Bewertungen
- Programming Course (6) : BasicDokument3 SeitenProgramming Course (6) : BasicRadunNoch keine Bewertungen
- Low Speed AVR OscilloscopeDokument9 SeitenLow Speed AVR OscilloscopeRodolfoPerezEscalonaNoch keine Bewertungen
- Provisional Patent DivoDokument7 SeitenProvisional Patent Divoapi-626221766Noch keine Bewertungen
- Quick Guide-XRN-410S, 810S-ENGLISH - Web-0220 PDFDokument8 SeitenQuick Guide-XRN-410S, 810S-ENGLISH - Web-0220 PDFLilli-Anne HansenNoch keine Bewertungen
- Farmbot Firmware Scope of WorkDokument6 SeitenFarmbot Firmware Scope of WorkICRDET 2019Noch keine Bewertungen
- Spider Dao One PagerDokument1 SeiteSpider Dao One PagerB latedNoch keine Bewertungen
- AVR USBasp Users Manual v1.1Dokument35 SeitenAVR USBasp Users Manual v1.1Jarfo100% (1)
- CZUR - Scaner ET16 Plus User Manual V8.0-1-EnglishDokument15 SeitenCZUR - Scaner ET16 Plus User Manual V8.0-1-EnglishDumNoch keine Bewertungen
- Package Summary: 1. DescriptionDokument3 SeitenPackage Summary: 1. DescriptionChristopher CoballesNoch keine Bewertungen
- Atmel AVR Microcontroller Family - Product Selection GuideDokument14 SeitenAtmel AVR Microcontroller Family - Product Selection GuideFrengkiansyahNoch keine Bewertungen
- Raspberry Pi Technology, Working and Its ApplicationsDokument13 SeitenRaspberry Pi Technology, Working and Its Applicationssohail khanNoch keine Bewertungen
- NEC 78K Doctor-EnglishDokument18 SeitenNEC 78K Doctor-EnglishcatalinNoch keine Bewertungen
- Arduino Camera (OV7670) Tutorial - Microcontroller TutorialsDokument1 SeiteArduino Camera (OV7670) Tutorial - Microcontroller TutorialsIvan BerlotNoch keine Bewertungen
- The Electric Pencil Word Processor 1977Dokument33 SeitenThe Electric Pencil Word Processor 1977Juan AlvesNoch keine Bewertungen
- Remote Control of R&S Spectrum and Network Analyzers Via LANDokument7 SeitenRemote Control of R&S Spectrum and Network Analyzers Via LANperiNoch keine Bewertungen
- Set Up RAMPS (Arduino, RepRap)Dokument1 SeiteSet Up RAMPS (Arduino, RepRap)DanielSpinozaNoch keine Bewertungen
- VM 205Dokument40 SeitenVM 205ZalNoch keine Bewertungen
- Nexus Operation and Maintenance - BRKDCT-2458Dokument111 SeitenNexus Operation and Maintenance - BRKDCT-2458praveen100% (1)
- Vcs Floating-Ip - A10 CommunityDokument3 SeitenVcs Floating-Ip - A10 Communitymoro2871990Noch keine Bewertungen
- Polyakov Direct Digital Synthesis Receiver - HackadayDokument8 SeitenPolyakov Direct Digital Synthesis Receiver - HackadaybaymanNoch keine Bewertungen
- Toner Deaf Hexacon 2022 ReleaseDokument60 SeitenToner Deaf Hexacon 2022 Releasemihaita.stefan1988Noch keine Bewertungen
- Pulse Oximeter Wireless Data Logger: Created by John ParkDokument17 SeitenPulse Oximeter Wireless Data Logger: Created by John ParkMalin KarunarathneNoch keine Bewertungen
- 2D Robot Vision System Robot Connection Manual (FANUC Edition)Dokument17 Seiten2D Robot Vision System Robot Connection Manual (FANUC Edition)emmanuel baezNoch keine Bewertungen
- Programming with VisiBroker: A Developer's Guide to VisiBroker for JavaVon EverandProgramming with VisiBroker: A Developer's Guide to VisiBroker for JavaNoch keine Bewertungen
- Virtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17Von EverandVirtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17Noch keine Bewertungen
- RP2040 Assembly Language Programming: ARM Cortex-M0+ on the Raspberry Pi PicoVon EverandRP2040 Assembly Language Programming: ARM Cortex-M0+ on the Raspberry Pi PicoNoch keine Bewertungen
- Making A Powerful Linear ActuatorDokument9 SeitenMaking A Powerful Linear ActuatorGEORGE KARYDISNoch keine Bewertungen
- Greenhouse Monitoring With Wireless Sensor Network: November 2008Dokument7 SeitenGreenhouse Monitoring With Wireless Sensor Network: November 2008GEORGE KARYDISNoch keine Bewertungen
- DIY Linear Actuator: Step 1: Materials and ToolsDokument15 SeitenDIY Linear Actuator: Step 1: Materials and ToolsGEORGE KARYDISNoch keine Bewertungen
- Kalostyn Study PlansDokument22 SeitenKalostyn Study PlansGEORGE KARYDISNoch keine Bewertungen
- Beam ENDokument202 SeitenBeam ENGEORGE KARYDISNoch keine Bewertungen
- Billiards TutorialDokument19 SeitenBilliards TutorialGEORGE KARYDISNoch keine Bewertungen
- Kastri 12: Study PlansDokument19 SeitenKastri 12: Study PlansGEORGE KARYDIS0% (1)
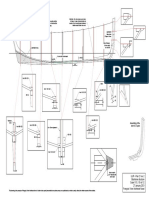
- ILUR - Plan 05 Stations Dimensions (Strip Planking Version) Scale 1/10 23 January 2004 François Vivier Architecte NavalDokument1 SeiteILUR - Plan 05 Stations Dimensions (Strip Planking Version) Scale 1/10 23 January 2004 François Vivier Architecte NavalGEORGE KARYDISNoch keine Bewertungen
- ILUR - Plan 11 Rev 2 General Arrangement Plan Scale 1/15 19 June 2013 François Vivier Architecte NavalDokument1 SeiteILUR - Plan 11 Rev 2 General Arrangement Plan Scale 1/15 19 June 2013 François Vivier Architecte NavalGEORGE KARYDISNoch keine Bewertungen
- ILUR - Plan 21 Rev 2 Backbone Structure Scale 1/15, 1/5 Et 1/2 27 January 2013 François Vivier Architecte NavalDokument1 SeiteILUR - Plan 21 Rev 2 Backbone Structure Scale 1/15, 1/5 Et 1/2 27 January 2013 François Vivier Architecte NavalGEORGE KARYDISNoch keine Bewertungen
- ILUR - Plan 04 Rev 3 Dimensions Stem and Transom (Clinker) Scale 1/10, 1/5 Et 1/2 29 January 2016 François Vivier Architecte NavalDokument1 SeiteILUR - Plan 04 Rev 3 Dimensions Stem and Transom (Clinker) Scale 1/10, 1/5 Et 1/2 29 January 2016 François Vivier Architecte NavalGEORGE KARYDISNoch keine Bewertungen
- ILUR - Plan 01 Lines Plan (Outside Planking) Clinker Version Scale 1/12 1 December 2003 François Vivier Architecte NavalDokument1 SeiteILUR - Plan 01 Lines Plan (Outside Planking) Clinker Version Scale 1/12 1 December 2003 François Vivier Architecte NavalGEORGE KARYDISNoch keine Bewertungen
- The Fundamentals of Solidworks 2007: David C. Planchard & Marie P. Planchard, CSWPDokument27 SeitenThe Fundamentals of Solidworks 2007: David C. Planchard & Marie P. Planchard, CSWPGEORGE KARYDISNoch keine Bewertungen
- Robosapien HackingDokument2 SeitenRobosapien HackingGEORGE KARYDISNoch keine Bewertungen
- Robosapien Hacking2Dokument3 SeitenRobosapien Hacking2GEORGE KARYDISNoch keine Bewertungen
- Tic Tac ToeDokument17 SeitenTic Tac ToeAlvin Wilfred OgotNoch keine Bewertungen
- C ProgramsDokument51 SeitenC ProgramsLigo PastiNoch keine Bewertungen
- Chapter 2Dokument17 SeitenChapter 2priyaadharshiniNoch keine Bewertungen
- Quad Loop Extender ModuleDokument4 SeitenQuad Loop Extender ModuleBeast NQNoch keine Bewertungen
- 16CS517-Formal Languages and Automata TheoryDokument8 Seiten16CS517-Formal Languages and Automata TheoryAmanpreet KaurNoch keine Bewertungen
- Dell 2135cn - ServiceMan (2009)Dokument898 SeitenDell 2135cn - ServiceMan (2009)Jonathan LongNoch keine Bewertungen
- FY109b 交換電路 FinalExam v4Dokument4 SeitenFY109b 交換電路 FinalExam v4陳楷翰Noch keine Bewertungen
- ICLOUDDokument15 SeitenICLOUDShantanu Chande100% (1)
- Pedoman Keselamatan Pasien Dan Manajemen Resiko FKTP 2018docxDokument67 SeitenPedoman Keselamatan Pasien Dan Manajemen Resiko FKTP 2018docxDwi RahayuningsihNoch keine Bewertungen
- Dca CPT CodesDokument1 SeiteDca CPT CodesMonstrozeroNoch keine Bewertungen
- Revision For SBADokument9 SeitenRevision For SBABoriss NovichkovsNoch keine Bewertungen
- KPLC DistributionDokument598 SeitenKPLC DistributionRahabGathoni50% (2)
- Data Networks Lab 1Dokument6 SeitenData Networks Lab 1Elias TakuraNoch keine Bewertungen
- The PIECES FrameworkDokument2 SeitenThe PIECES Frameworkdivyashree1988Noch keine Bewertungen
- Abe 14 Activity Module 4Dokument9 SeitenAbe 14 Activity Module 4Erman DeanoNoch keine Bewertungen
- Design and Manufacturing of A Propeller For Axial Flow FanDokument7 SeitenDesign and Manufacturing of A Propeller For Axial Flow FancbarajNoch keine Bewertungen
- Magna: BUZ900 BUZ901Dokument4 SeitenMagna: BUZ900 BUZ901rory957Noch keine Bewertungen
- ADFDokument54 SeitenADFSagar GaikwadNoch keine Bewertungen
- AP Suppliers in R12Dokument51 SeitenAP Suppliers in R12NagarajuNoch keine Bewertungen
- Tra 41a Servo Drive Mitsubishi ManualDokument28 SeitenTra 41a Servo Drive Mitsubishi Manualsasa mitic100% (1)
- Chapter 2-ITSA01Dokument20 SeitenChapter 2-ITSA01Augustine Laureta100% (1)
- COBIT-2019-Design-Toolkit TKT Eng 1218Dokument60 SeitenCOBIT-2019-Design-Toolkit TKT Eng 1218Kanza BellaNoch keine Bewertungen
- ZNC Die Sinking Edm MachineDokument73 SeitenZNC Die Sinking Edm MachineCommecha SYSNoch keine Bewertungen
- EXPERIMNET 0: (Environment Configuration & Sample Program)Dokument7 SeitenEXPERIMNET 0: (Environment Configuration & Sample Program)jfkajlfjNoch keine Bewertungen
- SpringBoot All ProgramsDokument16 SeitenSpringBoot All ProgramsHitesh WadhwaniNoch keine Bewertungen
- HSM USB Serial Driver Release Notes PDFDokument32 SeitenHSM USB Serial Driver Release Notes PDFVeimar CelisNoch keine Bewertungen
- How To Add Fonts To Xdo FileDokument5 SeitenHow To Add Fonts To Xdo Fileseethal_2Noch keine Bewertungen
- Electrical Design ProcessDokument6 SeitenElectrical Design ProcessUsha HaNoch keine Bewertungen
- Chapter 5Dokument14 SeitenChapter 5bhavyaNoch keine Bewertungen
- Exam Syria ATA 34Dokument4 SeitenExam Syria ATA 34Mohamed AliNoch keine Bewertungen