Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Moeller CatalogDokument659 SeitenMoeller CatalogGregg JamesNoch keine Bewertungen
- Read MeDokument1 SeiteRead Mealejo linaresNoch keine Bewertungen
- Dust Control Unit - CarmetDokument19 SeitenDust Control Unit - Carmetalejo linaresNoch keine Bewertungen
- Deep Work Rules For Focused Success in ADokument7 SeitenDeep Work Rules For Focused Success in Aalejo linares0% (1)
- Filtro Mangas CompactoDokument8 SeitenFiltro Mangas CompactoMarcelo CamposNoch keine Bewertungen
- Deep Work Rules For Focused Success in ADokument7 SeitenDeep Work Rules For Focused Success in Aalejo linares0% (1)
- Unidose PumpsDokument2 SeitenUnidose Pumpsalejo linaresNoch keine Bewertungen
- Motion Control HandbookDokument38 SeitenMotion Control Handbookvincentttt100% (1)
- WirelessHART Network ManagerDokument93 SeitenWirelessHART Network Managertanathos18Noch keine Bewertungen
- MPC14 LinearSystems PDFDokument56 SeitenMPC14 LinearSystems PDFalejo linaresNoch keine Bewertungen
- MPC14 LinearSystems PDFDokument56 SeitenMPC14 LinearSystems PDFalejo linaresNoch keine Bewertungen
- Moeller CatalogDokument659 SeitenMoeller CatalogGregg JamesNoch keine Bewertungen
- E Specific Ac I Ones Robot StudioDokument56 SeitenE Specific Ac I Ones Robot Studioalejo linaresNoch keine Bewertungen
- Product Manual: ABB RoboticsDokument236 SeitenProduct Manual: ABB Roboticsalejo linaresNoch keine Bewertungen
- Abb PDFDokument2 SeitenAbb PDFalejo linaresNoch keine Bewertungen
- Ipd Va40: Multi-Camera Vision ApplianceDokument2 SeitenIpd Va40: Multi-Camera Vision Appliancealejo linaresNoch keine Bewertungen
- Industrial RobotDokument2 SeitenIndustrial Robotalejo linaresNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Custom Fabricators, Incorporated Case StudyDokument3 SeitenCustom Fabricators, Incorporated Case StudyUmair MajeedNoch keine Bewertungen
- Indian Oil Corporation- Leading Indian State-Owned Oil and Gas CompanyDokument10 SeitenIndian Oil Corporation- Leading Indian State-Owned Oil and Gas CompanyPrakhar ShuklaNoch keine Bewertungen
- Signal Processing Problems Chapter 12Dokument20 SeitenSignal Processing Problems Chapter 12CNoch keine Bewertungen
- Sample Statement of Purpose.42120706Dokument8 SeitenSample Statement of Purpose.42120706Ata Ullah Mukhlis0% (2)
- Proportions PosterDokument1 SeiteProportions Posterapi-214764900Noch keine Bewertungen
- Gpredict User Manual 1.2Dokument64 SeitenGpredict User Manual 1.2Will JacksonNoch keine Bewertungen
- Reich Web ADokument34 SeitenReich Web Ak1nj3Noch keine Bewertungen
- I&C Engineer or Automation EngineerDokument3 SeitenI&C Engineer or Automation Engineerapi-79304330Noch keine Bewertungen
- Backup 2Dokument59 SeitenBackup 2Fabiola Tineo GamarraNoch keine Bewertungen
- Space Gass 12 5 Help Manual PDFDokument841 SeitenSpace Gass 12 5 Help Manual PDFNita NabanitaNoch keine Bewertungen
- © Call Centre Helper: 171 Factorial #VALUE! This Will Cause Errors in Your CalculationsDokument19 Seiten© Call Centre Helper: 171 Factorial #VALUE! This Will Cause Errors in Your CalculationswircexdjNoch keine Bewertungen
- Activity Emcee Mid-Year INSET 2021Dokument3 SeitenActivity Emcee Mid-Year INSET 2021Abegail A. Alangue-Calimag67% (6)
- CpE194 Lab Experiment # 1 - MTS-88 FamiliarizationDokument4 SeitenCpE194 Lab Experiment # 1 - MTS-88 FamiliarizationLouieMurioNoch keine Bewertungen
- Structural Testing Facilities at University of AlbertaDokument10 SeitenStructural Testing Facilities at University of AlbertaCarlos AcnNoch keine Bewertungen
- L16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiDokument25 SeitenL16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiMehul VarshneyNoch keine Bewertungen
- Db2 Compatibility PDFDokument23 SeitenDb2 Compatibility PDFMuhammed Abdul QaderNoch keine Bewertungen
- Date ValidationDokument9 SeitenDate ValidationAnonymous 9B0VdTWiNoch keine Bewertungen
- NMIMS MBA Midterm Decision Analysis and Modeling ExamDokument2 SeitenNMIMS MBA Midterm Decision Analysis and Modeling ExamSachi SurbhiNoch keine Bewertungen
- Pengenalan Icd-10 Struktur & IsiDokument16 SeitenPengenalan Icd-10 Struktur & IsirsudpwslampungNoch keine Bewertungen
- Research ProposalDokument2 SeitenResearch ProposalHo Manh LinhNoch keine Bewertungen
- Hum-Axis of Resistance A Study of Despair, Melancholy and Dis-Heartedness in Shahnaz Bashir's Novel The Half MotherDokument8 SeitenHum-Axis of Resistance A Study of Despair, Melancholy and Dis-Heartedness in Shahnaz Bashir's Novel The Half MotherImpact JournalsNoch keine Bewertungen
- Embedded Systems - RTOSDokument23 SeitenEmbedded Systems - RTOSCheril MehtaNoch keine Bewertungen
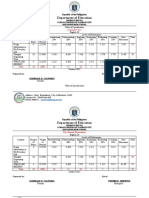
- Table of Specification ENGLISHDokument2 SeitenTable of Specification ENGLISHDonn Abel Aguilar IsturisNoch keine Bewertungen
- Key Note Units 3-4Dokument4 SeitenKey Note Units 3-4Javier BahenaNoch keine Bewertungen
- Trendline Mastery: Course Outline: 3. Interview of Peter Bain by Frank PaulDokument5 SeitenTrendline Mastery: Course Outline: 3. Interview of Peter Bain by Frank PaulnacareNoch keine Bewertungen
- SiargaoDokument11 SeitenSiargaomalouNoch keine Bewertungen
- Manual For The MCPL Programming LanguageDokument74 SeitenManual For The MCPL Programming Languagechri1753Noch keine Bewertungen
- Консп 1Dokument48 SeitenКонсп 1VadymNoch keine Bewertungen
- 3D Holographic Projection Technology SeminarDokument28 Seiten3D Holographic Projection Technology Seminarniteshnks1993Noch keine Bewertungen