Das könnte Ihnen auch gefallen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- Call For Paper-International Journal of Information Technology Convergence and Services (IJITCS)Dokument2 SeitenCall For Paper-International Journal of Information Technology Convergence and Services (IJITCS)ijitcsNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- International Journal On Natural Language Computing (IJNLC)Dokument1 SeiteInternational Journal On Natural Language Computing (IJNLC)DarrenNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- A Comparative Study On Human Views in Mythologies and WebtoonsDokument9 SeitenA Comparative Study On Human Views in Mythologies and WebtoonsIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedDokument2 SeitenThe International Journal of Multimedia & Its Applications (IJMA) ERA - IndexedIJMAJournalNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 2 1 PDFDokument18 Seiten2 1 PDFالمهندسوليدالطويلNoch keine Bewertungen
- Dorks List For Sql2019 PDFDokument50 SeitenDorks List For Sql2019 PDFVittorio De RosaNoch keine Bewertungen
- BP Azspu Driver Fatigue & Tiredness Management ProcedureDokument11 SeitenBP Azspu Driver Fatigue & Tiredness Management ProcedureEl Khan100% (1)
- French Revolution EssayDokument2 SeitenFrench Revolution Essayapi-346293409Noch keine Bewertungen
- GGSB MibDokument4 SeitenGGSB MibShrey BudhirajaNoch keine Bewertungen
- Sage 200 Evolution Training JourneyDokument5 SeitenSage 200 Evolution Training JourneysibaNoch keine Bewertungen
- LG+32LX330C Ga LG5CBDokument55 SeitenLG+32LX330C Ga LG5CBjampcarlosNoch keine Bewertungen
- Meco ReviewerDokument9 SeitenMeco ReviewerKang ChulNoch keine Bewertungen
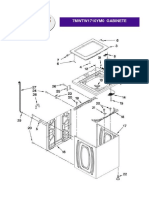
- 7MWTW1710YM0Dokument8 Seiten7MWTW1710YM0Izack-Dy JimZitNoch keine Bewertungen
- SWOT Analysis Microtel by WyndhamDokument10 SeitenSWOT Analysis Microtel by WyndhamAllyza Krizchelle Rosales BukidNoch keine Bewertungen
- Traffic Speed StudyDokument55 SeitenTraffic Speed StudyAnika Tabassum SarkarNoch keine Bewertungen
- Far160 Pyq Feb2023Dokument8 SeitenFar160 Pyq Feb2023nazzyusoffNoch keine Bewertungen
- Blockchain Technology in The Banking SectorDokument2 SeitenBlockchain Technology in The Banking Sectorvaralakshmi aNoch keine Bewertungen
- AW-NB037H-SPEC - Pegatron Lucid V1.3 - BT3.0+HS Control Pin Separated - PIN5 - Pin20Dokument8 SeitenAW-NB037H-SPEC - Pegatron Lucid V1.3 - BT3.0+HS Control Pin Separated - PIN5 - Pin20eldi_yeNoch keine Bewertungen
- Tourism: The Business of Hospitality and TravelDokument33 SeitenTourism: The Business of Hospitality and TravelNajla Nabila AurelliaNoch keine Bewertungen
- Price Action Trading Strategies - 6 Patterns That Work (Plus Free Video Tutorial)Dokument22 SeitenPrice Action Trading Strategies - 6 Patterns That Work (Plus Free Video Tutorial)kalpesh kathar100% (1)
- Cosare V BroadcomDokument2 SeitenCosare V BroadcomapbueraNoch keine Bewertungen
- Netaji Subhas Open UniversityDokument4 SeitenNetaji Subhas Open UniversityraydipanjanNoch keine Bewertungen
- Statement 1577731252322 PDFDokument11 SeitenStatement 1577731252322 PDFPriyanka ParidaNoch keine Bewertungen
- Payment Systems Worldwide: Appendix Country-by-Country AnswersDokument306 SeitenPayment Systems Worldwide: Appendix Country-by-Country Answersravinewatia27Noch keine Bewertungen
- God Save The Queen Score PDFDokument3 SeitenGod Save The Queen Score PDFDarion0% (2)
- Radix Sort - Wikipedia, The Free EncyclopediaDokument13 SeitenRadix Sort - Wikipedia, The Free EncyclopediasbaikunjeNoch keine Bewertungen
- X606 PDFDokument1 SeiteX606 PDFDany OrioliNoch keine Bewertungen
- Application Problems 1 Through 3Dokument5 SeitenApplication Problems 1 Through 3api-4072164490% (1)
- O-CNN: Octree-Based Convolutional Neural Networks For 3D Shape AnalysisDokument11 SeitenO-CNN: Octree-Based Convolutional Neural Networks For 3D Shape AnalysisJose Angel Duarte MartinezNoch keine Bewertungen
- Stryker Endoscopy SDC Pro 2 DVDDokument2 SeitenStryker Endoscopy SDC Pro 2 DVDWillemNoch keine Bewertungen
- 1610-2311-Executive Summary-EnDokument15 Seiten1610-2311-Executive Summary-EnKayzha Shafira Ramadhani460 105Noch keine Bewertungen
- Aircraft MaintenanceDokument32 SeitenAircraft MaintenanceTateNoch keine Bewertungen
- ANNEX C LIST OF EXCEPTIONS (Non-Disslosure of Information)Dokument3 SeitenANNEX C LIST OF EXCEPTIONS (Non-Disslosure of Information)ryujinxxcastorNoch keine Bewertungen
- WS-250 4BB 60 Cells 40mm DatasheetDokument2 SeitenWS-250 4BB 60 Cells 40mm DatasheetTejash NaikNoch keine Bewertungen