Das könnte Ihnen auch gefallen
- Me389 Aero01 Vtol GuidelineDokument11 SeitenMe389 Aero01 Vtol GuidelineMustafa Fazal AbbasNoch keine Bewertungen
- DC Motor Dynamics Data Acquisition, Parameters Estimation and Implementation of Cascade ControlDokument5 SeitenDC Motor Dynamics Data Acquisition, Parameters Estimation and Implementation of Cascade ControlAlisson Magalhães Silva MagalhãesNoch keine Bewertungen
- Lab 08 Modeling of Electrical and Electronics SystemsDokument24 SeitenLab 08 Modeling of Electrical and Electronics SystemsReem GheithNoch keine Bewertungen
- Tms320f2812 Based Implementation of Sensorless Control For BLDC MotorDokument10 SeitenTms320f2812 Based Implementation of Sensorless Control For BLDC Motoranhdv1979Noch keine Bewertungen
- Elg3311: Experiment 2 Simulation of A Transformer PerformanceDokument8 SeitenElg3311: Experiment 2 Simulation of A Transformer Performancesharif114100% (2)
- Power System Simulation Lab Manual - M.Tech (EPE) I Year I Sem& 2nd Sem - 2018Dokument98 SeitenPower System Simulation Lab Manual - M.Tech (EPE) I Year I Sem& 2nd Sem - 2018Nikhil amirishettyNoch keine Bewertungen
- Analysis of Boost Converter Fed DC Motor: Cleevan Deepak Britto Pradeep KumarDokument3 SeitenAnalysis of Boost Converter Fed DC Motor: Cleevan Deepak Britto Pradeep Kumarsaqib khalidNoch keine Bewertungen
- Active and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingDokument6 SeitenActive and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingGzam RaïfaNoch keine Bewertungen
- NEPLAN B08 Simulator EnglDokument3 SeitenNEPLAN B08 Simulator EnglsdiamanNoch keine Bewertungen
- Voltage Controller For Stand Alone Induction Generator Using Instantaneous Power ControlDokument5 SeitenVoltage Controller For Stand Alone Induction Generator Using Instantaneous Power Controlapi-27465568100% (1)
- DTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedDokument6 SeitenDTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedJevin ZackNoch keine Bewertungen
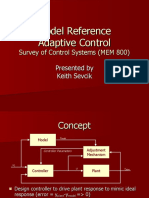
- Survey of Control Systems (MEM 800) PresentedDokument26 SeitenSurvey of Control Systems (MEM 800) PresentedvananhbarcaNoch keine Bewertungen
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Dokument11 SeitenElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Joseph NguyenNoch keine Bewertungen
- Sliding Mode Control of A BuckDokument6 SeitenSliding Mode Control of A BuckAdvika SharmaNoch keine Bewertungen
- Document 1 1614329814Dokument41 SeitenDocument 1 1614329814thiyagusuperNoch keine Bewertungen
- Team ID - Team Name - Advance Technology ReportDokument16 SeitenTeam ID - Team Name - Advance Technology ReportRitesh Manish BhutaNoch keine Bewertungen
- Expt 2 - Speed Control of DC MotorDokument4 SeitenExpt 2 - Speed Control of DC Motoritachi uchichaNoch keine Bewertungen
- BLDC Motor ModellingDokument6 SeitenBLDC Motor ModellingPhani ramNoch keine Bewertungen
- Behavior Models ComparatorDokument14 SeitenBehavior Models ComparatorDDragos GeorgeNoch keine Bewertungen
- Lab5 6Dokument11 SeitenLab5 6HD SheikhNoch keine Bewertungen
- Irsec 2014 7059786 PDFDokument6 SeitenIrsec 2014 7059786 PDFogataNoch keine Bewertungen
- Experiment FileDokument40 SeitenExperiment FilePankaj SharmaNoch keine Bewertungen
- Informe Lab - 6y7-Diseño - PIDDokument6 SeitenInforme Lab - 6y7-Diseño - PIDMiguel Angel Mamani MejiaNoch keine Bewertungen
- Universidad Nacional de IngenieríaDokument19 SeitenUniversidad Nacional de IngenieríasaverfimNoch keine Bewertungen
- Model Reference Adaptive Control: Survey of Control Systems (MEM 800)Dokument26 SeitenModel Reference Adaptive Control: Survey of Control Systems (MEM 800)Gilmar LeiteNoch keine Bewertungen
- An Open-Loop Sin Microstepping Driver Based On FPGA and The Co-Simulation of Modelsim and SimulinkDokument5 SeitenAn Open-Loop Sin Microstepping Driver Based On FPGA and The Co-Simulation of Modelsim and SimulinkTrần Tấn LộcNoch keine Bewertungen
- PowerPlus TM42 2182CDokument41 SeitenPowerPlus TM42 2182CDiego FurlongNoch keine Bewertungen
- 1 SMDokument7 Seiten1 SMaswardi8756Noch keine Bewertungen
- rm12 463 766 PDFDokument304 Seitenrm12 463 766 PDFMartin Estrada SotoNoch keine Bewertungen
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDokument63 SeitenJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNoch keine Bewertungen
- Jyotirmayee Dalei, Kanungo Barada Mohanty, Sumit Singh and Gour Sunder GarainDokument5 SeitenJyotirmayee Dalei, Kanungo Barada Mohanty, Sumit Singh and Gour Sunder GarainBiswajit SahaNoch keine Bewertungen
- Design and Development of Automatic Mains Failure Panel For Diesel GeneratorDokument31 SeitenDesign and Development of Automatic Mains Failure Panel For Diesel GeneratorMd sameerNoch keine Bewertungen
- Training - OLTC MR EcotapDokument16 SeitenTraining - OLTC MR Ecotapkajian19 juniNoch keine Bewertungen
- Model Reference Adaptive ControlDokument22 SeitenModel Reference Adaptive ControlRamaDinakaranNoch keine Bewertungen
- MPPT (PandO-INC-FUZZY-ANFIS) Simulation and Hardware Implementation.Dokument124 SeitenMPPT (PandO-INC-FUZZY-ANFIS) Simulation and Hardware Implementation.farid saadNoch keine Bewertungen
- Eva 525HF Calibration PDFDokument9 SeitenEva 525HF Calibration PDFRaniel Aris LigsayNoch keine Bewertungen
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDokument11 SeitenSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNoch keine Bewertungen
- Design of PID CONTROLLERDokument6 SeitenDesign of PID CONTROLLERRAJ KUMAR SHIHINoch keine Bewertungen
- Development of A 10kw Single Phase Igbt Inverter For Grid Connected PV ApplicationsDokument24 SeitenDevelopment of A 10kw Single Phase Igbt Inverter For Grid Connected PV ApplicationsAhmed Abd AlRahmanNoch keine Bewertungen
- EE 2257-Control Systems Lab ManualDokument66 SeitenEE 2257-Control Systems Lab ManualRam KumarNoch keine Bewertungen
- Using Modelsim To Simulate Logic Circuits in Verilog DesignsDokument29 SeitenUsing Modelsim To Simulate Logic Circuits in Verilog DesignsalexNoch keine Bewertungen
- A Matlab Simulation and Comparison of PWM Strategies As Applied To Variable Frequency Induction Motor DriveDokument4 SeitenA Matlab Simulation and Comparison of PWM Strategies As Applied To Variable Frequency Induction Motor DriveHebert Danilo Auccapure CusiNoch keine Bewertungen
- MPHS EXAM 13/06/16 - Prof. Luca Benini Name: Nmat:: Load 4'b1000Dokument7 SeitenMPHS EXAM 13/06/16 - Prof. Luca Benini Name: Nmat:: Load 4'b1000Sudhir Borra100% (1)
- Simulation of PMSM Vector Controlled (Simulink)Dokument4 SeitenSimulation of PMSM Vector Controlled (Simulink)visal pradeepkumarNoch keine Bewertungen
- Abassi 2015Dokument6 SeitenAbassi 2015Tarak BenslimaneNoch keine Bewertungen
- Tutorial - 3-Phase Inverter Control Loop DesignDokument11 SeitenTutorial - 3-Phase Inverter Control Loop DesignJandfor Tansfg ErrottNoch keine Bewertungen
- Adaptive P&O MPPT Technique For Photovoltaic Buck-Boost Converter SystemDokument5 SeitenAdaptive P&O MPPT Technique For Photovoltaic Buck-Boost Converter SystemFajar MaulanaNoch keine Bewertungen
- Tsai Et Al. - 2011 - Model Construction and Verification of A BLDC Motor Using MATLABSIMULINK and FPGA ControlDokument6 SeitenTsai Et Al. - 2011 - Model Construction and Verification of A BLDC Motor Using MATLABSIMULINK and FPGA ControlmitulNoch keine Bewertungen
- Lab 3 - HandoutDokument7 SeitenLab 3 - HandoutohmprakashNoch keine Bewertungen
- Optimal Control of Interior Permanent Magnet Synchronous Integrated Starter-GeneratorDokument9 SeitenOptimal Control of Interior Permanent Magnet Synchronous Integrated Starter-GeneratorMuhammad MudassarNoch keine Bewertungen
- Electric Vehicle Powertrain Simulation To Optimize Battery and Vehicle PerformancesDokument5 SeitenElectric Vehicle Powertrain Simulation To Optimize Battery and Vehicle PerformancesNarendra YadavNoch keine Bewertungen
- Digital Power Electronics and ApplicationsVon EverandDigital Power Electronics and ApplicationsBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Introduction to Electronic Analogue Computers: International Series of Monographs in Electronics and InstrumentationVon EverandIntroduction to Electronic Analogue Computers: International Series of Monographs in Electronics and InstrumentationNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Iec 61724-1 2017 Version-Selection of Pyranometers v2008Dokument4 SeitenIec 61724-1 2017 Version-Selection of Pyranometers v2008wwahib2100% (1)
- International Standard: Norme InternationaleDokument19 SeitenInternational Standard: Norme Internationalewwahib2Noch keine Bewertungen
- Iec TS 61724-2-2016Dokument32 SeitenIec TS 61724-2-2016wwahib2Noch keine Bewertungen
- Acet 22510 Door Entry Handset Data SheetDokument2 SeitenAcet 22510 Door Entry Handset Data Sheetwwahib2Noch keine Bewertungen
- 5peb1001 6656xb 213231 CDokument1 Seite5peb1001 6656xb 213231 Cwwahib2Noch keine Bewertungen
- Photovoltaic System Performance - Part 1: Monitoring: Irish Standard I.S. EN 61724-1:2017Dokument20 SeitenPhotovoltaic System Performance - Part 1: Monitoring: Irish Standard I.S. EN 61724-1:2017wwahib2Noch keine Bewertungen
- Digital Control Strategy For Harmonic Compensation of Dynamic Voltage RestorerDokument9 SeitenDigital Control Strategy For Harmonic Compensation of Dynamic Voltage Restorerwwahib2Noch keine Bewertungen
- Creating Axi-Lite Custom IP' in Vivado: Lab For COMP4601Dokument33 SeitenCreating Axi-Lite Custom IP' in Vivado: Lab For COMP4601wwahib2Noch keine Bewertungen
- Simulation Credibility Assessment Methodology With FPGA-based Hardware-in-the-Loop PlatformDokument11 SeitenSimulation Credibility Assessment Methodology With FPGA-based Hardware-in-the-Loop Platformwwahib2Noch keine Bewertungen
- Applied Sciences: Comparative Analysis of Current Control Techniques To Support Virtual Inertia ApplicationsDokument19 SeitenApplied Sciences: Comparative Analysis of Current Control Techniques To Support Virtual Inertia Applicationswwahib2Noch keine Bewertungen
- 1727.UCD3138 Control TheoryDokument49 Seiten1727.UCD3138 Control Theorywwahib2100% (1)
- 06 - MVD - FIR - Design PDFDokument29 Seiten06 - MVD - FIR - Design PDFwwahib2Noch keine Bewertungen
- Ijest10 02 12 191Dokument4 SeitenIjest10 02 12 191wwahib2Noch keine Bewertungen
- SFA14KX Hardware Installation and Maintenance Guide For SFA OS 11.0.1Dokument163 SeitenSFA14KX Hardware Installation and Maintenance Guide For SFA OS 11.0.1robby nazarethNoch keine Bewertungen
- Sony HBD-HZ970W - IZ1000W Ver. 1.0 2010.06 Blu-Ray Disc Player SMDokument138 SeitenSony HBD-HZ970W - IZ1000W Ver. 1.0 2010.06 Blu-Ray Disc Player SMboroda2410Noch keine Bewertungen
- Symantec Data Center Security Server Monitoring Edition and Server Advanced 6.8 Overview GuideDokument20 SeitenSymantec Data Center Security Server Monitoring Edition and Server Advanced 6.8 Overview GuideĐình Khánh BùiNoch keine Bewertungen
- Computer 1Dokument8 SeitenComputer 1marce1909Noch keine Bewertungen
- Work Instructions: Adjustable Igniter Replacement Capstone Model C200 Microturbine /C1000 Series Purpose and ScopeDokument12 SeitenWork Instructions: Adjustable Igniter Replacement Capstone Model C200 Microturbine /C1000 Series Purpose and ScopeJefferson Mosquera PerezNoch keine Bewertungen
- Autopipe: Connect V11.1Dokument29 SeitenAutopipe: Connect V11.1Mallela Sampath KumarNoch keine Bewertungen
- Delta Conversion VFD TO CP2000 PDFDokument61 SeitenDelta Conversion VFD TO CP2000 PDFvkdanshulNoch keine Bewertungen
- Hiding Malicious Content in PDF Documents: Dan-Sabin PopescuDokument8 SeitenHiding Malicious Content in PDF Documents: Dan-Sabin PopescuAbdullah NasirNoch keine Bewertungen
- Light Current Systems Course: Eng.: Rizk MagdyDokument16 SeitenLight Current Systems Course: Eng.: Rizk MagdyIslamNoch keine Bewertungen
- Super Manual 4.3 PDFDokument60 SeitenSuper Manual 4.3 PDFJohnkevinGarcia C. JohnkevinGarciaNoch keine Bewertungen
- P2M BookletDokument20 SeitenP2M BookletAkaninyeneNoch keine Bewertungen
- CCIE LabDokument144 SeitenCCIE LabCông SơnNoch keine Bewertungen
- CV of MD Moshiur RahamanDokument3 SeitenCV of MD Moshiur RahamanMoshiur RahamanNoch keine Bewertungen
- PSP Fat Procedure - TemplateDokument6 SeitenPSP Fat Procedure - TemplateMichael HaiseNoch keine Bewertungen
- Balachandar Sridharan: Devops EngineerDokument3 SeitenBalachandar Sridharan: Devops EngineerVishnu SelvamNoch keine Bewertungen
- HR Shared Services: Best Practices, Business Model and TechnologyDokument11 SeitenHR Shared Services: Best Practices, Business Model and TechnologypiermeNoch keine Bewertungen
- Ultracharge Installation InstructionsDokument14 SeitenUltracharge Installation InstructionsAna RuxandraNoch keine Bewertungen
- Toshiba Te Series StartupDokument38 SeitenToshiba Te Series Startupkhaldoun samiNoch keine Bewertungen
- Comptia Linux Guide To Linux Certification 4th Edition Eckert Test BankDokument10 SeitenComptia Linux Guide To Linux Certification 4th Edition Eckert Test BankCherylRandolphpgyre100% (17)
- BPO1 - Module 2Dokument7 SeitenBPO1 - Module 2Jerecho InatillezaNoch keine Bewertungen
- PYTHON For Class9Dokument5 SeitenPYTHON For Class9AuraNoch keine Bewertungen
- Design Fuzzy Logic Controller For Liquid Level ControlDokument4 SeitenDesign Fuzzy Logic Controller For Liquid Level ControlBelen GonzalezNoch keine Bewertungen
- SJ-20141127113509-001-ZXSDR R8872A (HV1.0) Product Description - 732736Dokument20 SeitenSJ-20141127113509-001-ZXSDR R8872A (HV1.0) Product Description - 732736Rehan Haider JafferyNoch keine Bewertungen
- PTW #: Location of work:RIG FLOOR Task Description: INSTALL T Piece Supervisor: TBRA #:D-111Dokument2 SeitenPTW #: Location of work:RIG FLOOR Task Description: INSTALL T Piece Supervisor: TBRA #:D-111DrillerNoch keine Bewertungen
- Servicenow Testinises Csa Exam Question 2023-Jul-01 by Ashburn 248q VceDokument21 SeitenServicenow Testinises Csa Exam Question 2023-Jul-01 by Ashburn 248q VceEstudante ServicenowNoch keine Bewertungen
- AOLT-4000 OAM Manual PDFDokument546 SeitenAOLT-4000 OAM Manual PDFBrenden CarvalhoNoch keine Bewertungen
- Software Requirement Specification: Employee Tracking SystemDokument14 SeitenSoftware Requirement Specification: Employee Tracking SystemBerker Güngör50% (4)
- ABAP-CDS-FIORI Interview Question 2023Dokument6 SeitenABAP-CDS-FIORI Interview Question 2023125diptiNoch keine Bewertungen
- Water Pipe Robot With Soft Inflatable ActuatorsDokument7 SeitenWater Pipe Robot With Soft Inflatable ActuatorseyaoNoch keine Bewertungen
- Ga Z77X D3H R101 PDFDokument41 SeitenGa Z77X D3H R101 PDFTANoch keine Bewertungen