Das könnte Ihnen auch gefallen
- Principles of Welding: Processes, Physics, Chemistry, and MetallurgyVon EverandPrinciples of Welding: Processes, Physics, Chemistry, and MetallurgyBewertung: 4 von 5 Sternen4/5 (1)
- UUV Final Primer FormattedDokument8 SeitenUUV Final Primer FormattedJay ZNoch keine Bewertungen
- BMTDSL Designing SSKs Vidar Confpaper UDTPacific Oct08Dokument17 SeitenBMTDSL Designing SSKs Vidar Confpaper UDTPacific Oct08DUNCAN0420Noch keine Bewertungen
- Autonomous Underwater VehicleDokument9 SeitenAutonomous Underwater VehicleManas BajpaiNoch keine Bewertungen
- Advances in Unmanned Underwater Vehicles TechnologDokument15 SeitenAdvances in Unmanned Underwater Vehicles TechnologBurak PalaNoch keine Bewertungen
- Autonomous Underwater VehicleDokument5 SeitenAutonomous Underwater VehicleBiswajit PadhiNoch keine Bewertungen
- Unmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForDokument11 SeitenUnmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForAhmad Zubair RasulyNoch keine Bewertungen
- Unmanned Undersea Vehicle (UUV) Physical Payload Interface: Standard Guide ForDokument7 SeitenUnmanned Undersea Vehicle (UUV) Physical Payload Interface: Standard Guide ForAhmad Zubair RasulyNoch keine Bewertungen
- Advanced Degaussing SystemsDokument8 SeitenAdvanced Degaussing Systemsaks180181Noch keine Bewertungen
- Stealth Philosophy, Real SolutionsDokument10 SeitenStealth Philosophy, Real SolutionsSunil Kumar P GNoch keine Bewertungen
- Training DW PDFDokument31 SeitenTraining DW PDFCeliaZurdoPerladoNoch keine Bewertungen
- Degaussing SystemDokument12 SeitenDegaussing SystemAlchemist_JVC50% (2)
- SPY-1 Family Brochure 6-PagerDokument6 SeitenSPY-1 Family Brochure 6-Pagerfox40Noch keine Bewertungen
- The 4 - 95 Stirling Engine For Underwater ApplicationDokument4 SeitenThe 4 - 95 Stirling Engine For Underwater ApplicationVladimirDvortsovNoch keine Bewertungen
- Underwater Channel SimulationDokument55 SeitenUnderwater Channel SimulationPratheek Praveen KumarNoch keine Bewertungen
- Submarine - WikipediaDokument32 SeitenSubmarine - WikipediaNaheed100% (1)
- UsvmpprDokument141 SeitenUsvmpprBam2179Noch keine Bewertungen
- Moorthy Viva Voce PPT-02!08!14Dokument55 SeitenMoorthy Viva Voce PPT-02!08!14Moorthy GNoch keine Bewertungen
- Documento 1.-Development of An Unmanned Maritime System Reference ArchitectureDokument12 SeitenDocumento 1.-Development of An Unmanned Maritime System Reference Architecturechoque790Noch keine Bewertungen
- Atlas Seaotter: Auv For Multi-Purpose Underwater OperationsDokument4 SeitenAtlas Seaotter: Auv For Multi-Purpose Underwater OperationsMartin Schweighart MoyaNoch keine Bewertungen
- The Development of The Multibeam EchosounderDokument2 SeitenThe Development of The Multibeam EchosounderKim Kiki ZaenuriNoch keine Bewertungen
- New Implementation of Navy Standard Welding Procedures CastnerDokument17 SeitenNew Implementation of Navy Standard Welding Procedures CastnerJulio CastilhosNoch keine Bewertungen
- Underwater Acoustic Noise Measurement of VesselsDokument6 SeitenUnderwater Acoustic Noise Measurement of VesselsJohn KaruwalNoch keine Bewertungen
- Underwater Warfare: Making A DifferenceDokument7 SeitenUnderwater Warfare: Making A DifferencehocineNoch keine Bewertungen
- Super Cavitation and Its Application in SubmarinesDokument22 SeitenSuper Cavitation and Its Application in Submarinesaksh2206Noch keine Bewertungen
- Integrated ASW Suite For Surface VesselsDokument16 SeitenIntegrated ASW Suite For Surface Vesselszhang yun100% (1)
- DegaussingDokument14 SeitenDegaussingRoma GunawanNoch keine Bewertungen
- Unmanned Undersea Vehicles (UUV) Autonomy and Control: Standard Guide ForDokument24 SeitenUnmanned Undersea Vehicles (UUV) Autonomy and Control: Standard Guide ForAhmad Zubair Rasuly100% (2)
- Sonar Introduction 2012 Compressed PDFDokument11 SeitenSonar Introduction 2012 Compressed PDFBrenno Moura MouraNoch keine Bewertungen
- Submarine-&-Naval Ship Design For The Littorals-Saab KockumsDokument15 SeitenSubmarine-&-Naval Ship Design For The Littorals-Saab KockumsÁlvaro Conti FilhoNoch keine Bewertungen
- Underwater RoboticsDokument23 SeitenUnderwater RoboticsNaman KansalNoch keine Bewertungen
- NAVY Mineman, Volume 5 NAVEDTRA 14158 1994 60 PagesDokument60 SeitenNAVY Mineman, Volume 5 NAVEDTRA 14158 1994 60 PagesStevenNoch keine Bewertungen
- Hydrodynamic Test Facilities PDFDokument34 SeitenHydrodynamic Test Facilities PDFDarshanNoch keine Bewertungen
- Unmanned Undersea Vehicle (UUV) Communications: Standard Guide ForDokument26 SeitenUnmanned Undersea Vehicle (UUV) Communications: Standard Guide ForAhmad Zubair RasulyNoch keine Bewertungen
- SubmarineDokument28 SeitenSubmarinepriyanka12987Noch keine Bewertungen
- 1 History: TitanicDokument24 Seiten1 History: TitanicChaitanya VarmaNoch keine Bewertungen
- DRDO SonarDokument16 SeitenDRDO SonarRaajeswaran Baskaran100% (1)
- Defeating The Mine Threat: Peter B NilssonDokument37 SeitenDefeating The Mine Threat: Peter B Nilssonahmed mohamedNoch keine Bewertungen
- SUBCODE ASNE07 RevFDokument11 SeitenSUBCODE ASNE07 RevFMatt GerdonNoch keine Bewertungen
- Development Depth Control and Stability Analysis of An Underwater Remotely Operated Vehicle ROVDokument6 SeitenDevelopment Depth Control and Stability Analysis of An Underwater Remotely Operated Vehicle ROVSuman SahaNoch keine Bewertungen
- Development in Underwater Robotic Vehicles-URVDokument9 SeitenDevelopment in Underwater Robotic Vehicles-URVSMI2012Noch keine Bewertungen
- Taking Mines Seriously: Mine Warfare in China's Near SeasDokument37 SeitenTaking Mines Seriously: Mine Warfare in China's Near SeasBlaze123x100% (1)
- Naval Sea Systems Command (NAVSEA) Nondestructive Testing (NDT)Dokument32 SeitenNaval Sea Systems Command (NAVSEA) Nondestructive Testing (NDT)Deepak PansuriyaNoch keine Bewertungen
- Watercraft Stealth TechnologyDokument25 SeitenWatercraft Stealth TechnologyJackelyn BautistaNoch keine Bewertungen
- Appendix (Safe Diving Distances From Transmitting Sonar)Dokument42 SeitenAppendix (Safe Diving Distances From Transmitting Sonar)Han TunNoch keine Bewertungen
- An Introduction To Inertial NavigationDokument37 SeitenAn Introduction To Inertial NavigationZee ZouNoch keine Bewertungen
- Aplicaciones MilitaresDokument4 SeitenAplicaciones MilitaresMabel NúñezNoch keine Bewertungen
- Submarines and SubmersiblesDokument28 SeitenSubmarines and Submersiblespraveench1888Noch keine Bewertungen
- Indian Indigenous Underwater Weapon Systems by DRDODokument11 SeitenIndian Indigenous Underwater Weapon Systems by DRDOShiv Aroor100% (2)
- Ocean Eagle 43MHDokument2 SeitenOcean Eagle 43MHB7r100% (1)
- VA Class Cost ReductionDokument18 SeitenVA Class Cost ReductionNikita Bhavsar Shah100% (1)
- The Response of Ships To UNDEX PDFDokument48 SeitenThe Response of Ships To UNDEX PDFFernando Raúl LADINONoch keine Bewertungen
- Black SharkDokument2 SeitenBlack SharklaltaputunnnsNoch keine Bewertungen
- A Brief Taxonomy of Autonomous Under Water Vehicle Design LiteratureDokument4 SeitenA Brief Taxonomy of Autonomous Under Water Vehicle Design Literaturedavid_okahNoch keine Bewertungen
- Rina Warship 2018 Aitken MCM Paper PDFDokument11 SeitenRina Warship 2018 Aitken MCM Paper PDFjorj chirilaNoch keine Bewertungen
- Trends and Challenges in Unmanned Surface Vehicles (USV) - From Survey To ShippingDokument8 SeitenTrends and Challenges in Unmanned Surface Vehicles (USV) - From Survey To ShippingVORTICE ENGINEERING AND CONSTRUCTIONNoch keine Bewertungen
- BMTDSL UUV Options Confpaper INEC Apr08Dokument15 SeitenBMTDSL UUV Options Confpaper INEC Apr08EdyNoch keine Bewertungen
- Mitwr 11010Dokument9 SeitenMitwr 11010Sunil Kumar P GNoch keine Bewertungen
- Uwsn Milcom 2005 PDFDokument7 SeitenUwsn Milcom 2005 PDFamit guptaNoch keine Bewertungen
- 22 - A SurveyDokument6 Seiten22 - A SurveyPavan KumarNoch keine Bewertungen
- MunawarDokument3 SeitenMunawarPavan KumarNoch keine Bewertungen
- Aadhaar Enrolment Correction Form Version 2.1Dokument2 SeitenAadhaar Enrolment Correction Form Version 2.1makNoch keine Bewertungen
- Base PaperDokument5 SeitenBase PaperPavan KumarNoch keine Bewertungen
- 2019 Top 10 Health Technology Hazards: Executive BriefDokument19 Seiten2019 Top 10 Health Technology Hazards: Executive BriefNanda WicaksonoNoch keine Bewertungen
- Electronic Protection To Exam Paper Leakage IJERTV2IS50588Dokument7 SeitenElectronic Protection To Exam Paper Leakage IJERTV2IS50588AMal MpNoch keine Bewertungen
- Solar RoadwaysDokument3 SeitenSolar RoadwaysEarlJaysonAlvaranNoch keine Bewertungen
- Solar RoadwaysDokument3 SeitenSolar RoadwaysEarlJaysonAlvaranNoch keine Bewertungen
- Heavy Lift ProjectsDokument7 SeitenHeavy Lift Projectssajjad_naghdi241Noch keine Bewertungen
- Solution Manual For Basic Econometrics Gujarati Porter 5th EditionDokument36 SeitenSolution Manual For Basic Econometrics Gujarati Porter 5th Editionthribbleromeward44i1100% (49)
- mẫu hợp đồng ngoại thươngDokument2 Seitenmẫu hợp đồng ngoại thươngHải Bằng TrầnNoch keine Bewertungen
- National Load Shedding Guide From Monday March 17, 2014 To Sunday March 30, 2014Dokument3 SeitenNational Load Shedding Guide From Monday March 17, 2014 To Sunday March 30, 2014benji24Noch keine Bewertungen
- AHMAD NIZAM UPDATED DOCUMENT 2021 (This)Dokument18 SeitenAHMAD NIZAM UPDATED DOCUMENT 2021 (This)andyNoch keine Bewertungen
- Winners of The Congressman James Sener Award For Excellence in Marine Investigations (Cy2010)Dokument1 SeiteWinners of The Congressman James Sener Award For Excellence in Marine Investigations (Cy2010)cgreportNoch keine Bewertungen
- GMDSS and The Recreational BoaterDokument3 SeitenGMDSS and The Recreational BoaterHamis Ramadhani100% (1)
- Ship ProductionDokument466 SeitenShip Productionpicolovac22100% (2)
- GR 75118 Sea-Land Service Inc Vs IACDokument12 SeitenGR 75118 Sea-Land Service Inc Vs IACJessie AncogNoch keine Bewertungen
- Activity 1Dokument5 SeitenActivity 1Mikka Lyn Jane AlemaniaNoch keine Bewertungen
- Establish-Encarnacion PhilatelyDokument33 SeitenEstablish-Encarnacion PhilatelyAbi TarrozaNoch keine Bewertungen
- All Hands Naval Bulletin - Dec 1942Dokument64 SeitenAll Hands Naval Bulletin - Dec 1942CAP History LibraryNoch keine Bewertungen
- 00 - Ship Design and Construction - Damage To Hull PDFDokument79 Seiten00 - Ship Design and Construction - Damage To Hull PDFEngineerAleNoch keine Bewertungen
- International Towing Tank Conference ITTC Symbols andDokument131 SeitenInternational Towing Tank Conference ITTC Symbols and3332009Noch keine Bewertungen
- IACS Common Structural Rules For Double Hull Oil Tankers Corrigenda1 PDFDokument51 SeitenIACS Common Structural Rules For Double Hull Oil Tankers Corrigenda1 PDFBasong SanNoch keine Bewertungen
- Color and Markings of The Japanese Explosive Ordnance at Pearl Harbor, A SummaryDokument10 SeitenColor and Markings of The Japanese Explosive Ordnance at Pearl Harbor, A Summaryeod8Noch keine Bewertungen
- Container OperationsDokument15 SeitenContainer OperationsKiriakos Ifantidis100% (1)
- AMIGA - Advanced Destroyer Simulator ManualDokument5 SeitenAMIGA - Advanced Destroyer Simulator ManualjajagaborNoch keine Bewertungen
- MacGregor-News 163Dokument36 SeitenMacGregor-News 163sipasit1518Noch keine Bewertungen
- Melcal FL SeriesDokument28 SeitenMelcal FL SeriesEmiliano Gaspar FacioNoch keine Bewertungen
- Technical ReportDokument38 SeitenTechnical ReportRyan ColemanNoch keine Bewertungen
- Electronic Chart Display and Information SystemDokument17 SeitenElectronic Chart Display and Information SystemJohn Kim Bercasio Mabansay100% (2)
- Engleza MarinareascaDokument325 SeitenEngleza MarinareascaAndrei RadulescuNoch keine Bewertungen
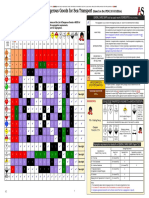
- Segregation of Dangerous Goods For Sea Transport: (Based On The IMDG 2016 Edition)Dokument2 SeitenSegregation of Dangerous Goods For Sea Transport: (Based On The IMDG 2016 Edition)Elton PintoNoch keine Bewertungen
- Topaz Jumeirah Vessel SpecsDokument7 SeitenTopaz Jumeirah Vessel SpecsJym GensonNoch keine Bewertungen
- Transportation in Canada 2011 PDFDokument155 SeitenTransportation in Canada 2011 PDFmenagesNoch keine Bewertungen
- Hand Over Note - Mv.best HonorDokument2 SeitenHand Over Note - Mv.best HonorThant Zin100% (1)
- Immigration-Early 20 Century: Activity 3Dokument3 SeitenImmigration-Early 20 Century: Activity 3Andreea MalNoch keine Bewertungen
- AGCS Safety Shipping Review 2019Dokument52 SeitenAGCS Safety Shipping Review 2019Akash MishraNoch keine Bewertungen
- Record of Particulars Assignment For LoadlineDokument16 SeitenRecord of Particulars Assignment For LoadlineMaan MrabetNoch keine Bewertungen