Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Topical Revision Notes Biology O Level PDFDokument140 SeitenTopical Revision Notes Biology O Level PDFBilal Akram79% (19)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- How To Design Roof Purlins - A Solved Example - StructvilleDokument16 SeitenHow To Design Roof Purlins - A Solved Example - StructvilleLavanyanNoch keine Bewertungen
- Healthcare Monitoring System and Transforming Monitored Data Into Real Time Clinical Feedback Based On Iot Using Raspberry PiDokument7 SeitenHealthcare Monitoring System and Transforming Monitored Data Into Real Time Clinical Feedback Based On Iot Using Raspberry Pimikko intalNoch keine Bewertungen
- Sweet Potato (Ipomoea Batatas) Variety Recognizer Using Image Processing and Artificial Neural NetworkDokument4 SeitenSweet Potato (Ipomoea Batatas) Variety Recognizer Using Image Processing and Artificial Neural Networkmikko intalNoch keine Bewertungen
- Autonomous Tree Climbing Robot (TREEBO T) : Shrivathsan Naray Yanan, Vinoop.U, Satish.M, Yashw Wanth N.GDokument5 SeitenAutonomous Tree Climbing Robot (TREEBO T) : Shrivathsan Naray Yanan, Vinoop.U, Satish.M, Yashw Wanth N.Gmikko intalNoch keine Bewertungen
- Bipolar Junction Transistor (BJT)Dokument16 SeitenBipolar Junction Transistor (BJT)mikko intalNoch keine Bewertungen
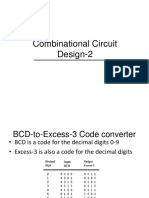
- Combinational Circuit Design-2Dokument36 SeitenCombinational Circuit Design-2mikko intalNoch keine Bewertungen
- Table of ContentsDokument3 SeitenTable of Contentsmikko intalNoch keine Bewertungen
- Dear Provost Committee On Scholarship ReviewDokument3 SeitenDear Provost Committee On Scholarship Reviewmikko intalNoch keine Bewertungen
- Asic Lectrical Afety: ELECTRICAL/elbasic1/1-95Dokument63 SeitenAsic Lectrical Afety: ELECTRICAL/elbasic1/1-95mikko intalNoch keine Bewertungen
- Kabanata 7 - Rizal Sa Paris Hanggang Berlin: A Las Flores de Heidelberg - Ang Tulang Sinulat Ni Rizal SaDokument7 SeitenKabanata 7 - Rizal Sa Paris Hanggang Berlin: A Las Flores de Heidelberg - Ang Tulang Sinulat Ni Rizal Samikko intalNoch keine Bewertungen
- Biomass Power PlantDokument5 SeitenBiomass Power Plantmikko intalNoch keine Bewertungen
- Bt-Eet 3A Bt-Eet 3A: # 24 E. Natividad ST., Tabing-Ilog Marilao, BulacanDokument4 SeitenBt-Eet 3A Bt-Eet 3A: # 24 E. Natividad ST., Tabing-Ilog Marilao, Bulacanmikko intalNoch keine Bewertungen
- Thor - Ragnarok.2017.1080p.bluray.x264 (YTS - Am)Dokument135 SeitenThor - Ragnarok.2017.1080p.bluray.x264 (YTS - Am)mikko intalNoch keine Bewertungen
- The Fate of The Furious 2017 720p HDTC x264 ShAaNiGDokument114 SeitenThe Fate of The Furious 2017 720p HDTC x264 ShAaNiGmikko intalNoch keine Bewertungen
- ElevatorDokument4 SeitenElevatormikko intalNoch keine Bewertungen
- Name Tag Final (Autosaved)Dokument3 SeitenName Tag Final (Autosaved)mikko intalNoch keine Bewertungen
- Narrative Report Final 1 DOMINICDokument23 SeitenNarrative Report Final 1 DOMINICmikko intalNoch keine Bewertungen
- Class No.: 13 Name: Chester Madrigal Lorenzo Nickname: Ches City Address: Contact No.: Email Address: Guardian: Relationship: Contact No.Dokument1 SeiteClass No.: 13 Name: Chester Madrigal Lorenzo Nickname: Ches City Address: Contact No.: Email Address: Guardian: Relationship: Contact No.mikko intalNoch keine Bewertungen
- A1040 MiraDokument4 SeitenA1040 MiramichelditommasoNoch keine Bewertungen
- Pyrobel Brochure 2012Dokument24 SeitenPyrobel Brochure 2012PegaNoch keine Bewertungen
- Chapter 2: Chemicals, Apparatus, and Unit Operations of Analytical ChemistryDokument28 SeitenChapter 2: Chemicals, Apparatus, and Unit Operations of Analytical Chemistryangela100% (2)
- Max31856 PDFDokument30 SeitenMax31856 PDFDiego Fernando ArpiNoch keine Bewertungen
- ApatitDokument9 SeitenApatittrinh xuan hiepNoch keine Bewertungen
- Mathematical Modelling of Stress-Strain Curves of Masonry MaterialsDokument13 SeitenMathematical Modelling of Stress-Strain Curves of Masonry Materialsarif septaNoch keine Bewertungen
- Centrifugal Pump Test RigDokument4 SeitenCentrifugal Pump Test RigSameer Tamboli100% (1)
- Kobold Flow SensorDokument4 SeitenKobold Flow SensorjilaypandyaNoch keine Bewertungen
- RC2Dokument92 SeitenRC2Chrisneil DelosreyesNoch keine Bewertungen
- College Physics Global 10th Edition Young Solutions ManualDokument25 SeitenCollege Physics Global 10th Edition Young Solutions ManualSaraSmithdgyj100% (57)
- Designing A MixerDokument12 SeitenDesigning A MixerPrasanna KumarNoch keine Bewertungen
- Fundamentals of AC and All Air SystemDokument36 SeitenFundamentals of AC and All Air Systemnareshbv749Noch keine Bewertungen
- General Solution For U-ShapeDokument12 SeitenGeneral Solution For U-ShapeDiana SoareNoch keine Bewertungen
- Notes - Transformation (Enlargement)Dokument5 SeitenNotes - Transformation (Enlargement)Samhan Azamain0% (1)
- Earthquake AnalysisDokument11 SeitenEarthquake AnalysisSalauddinAnsariNoch keine Bewertungen
- Fsec CR 1537 05Dokument613 SeitenFsec CR 1537 05Amber StrongNoch keine Bewertungen
- Report WritingDokument24 SeitenReport WritingVasudevanNoch keine Bewertungen
- Msa Ace Inv 1Dokument11 SeitenMsa Ace Inv 1api-413796204Noch keine Bewertungen
- Module1 - MagnetismDokument35 SeitenModule1 - MagnetismJoicsha Nicole FerrerNoch keine Bewertungen
- B 63 - 90 R01 - QjyzDokument4 SeitenB 63 - 90 R01 - QjyzAndresNoch keine Bewertungen
- Leica ICD Brochure enDokument4 SeitenLeica ICD Brochure enCsaba GibártiNoch keine Bewertungen
- Syllabus - Mathematical EconomicsDokument2 SeitenSyllabus - Mathematical EconomicsMRVNoch keine Bewertungen
- Universidad Cooperativa de Colombia: Calculo Vectorial Graficas FuncionesDokument11 SeitenUniversidad Cooperativa de Colombia: Calculo Vectorial Graficas FuncionesDavid TorresNoch keine Bewertungen
- 3 IntroductionDokument5 Seiten3 IntroductionKhamvanh PhengnaoneNoch keine Bewertungen
- Session - 5 FEA of Grids: Module Code: 19STC502A-2021Dokument34 SeitenSession - 5 FEA of Grids: Module Code: 19STC502A-2021rajaNoch keine Bewertungen
- Section 133123Dokument11 SeitenSection 133123Dian Aplimon JohannisNoch keine Bewertungen
- ANSYS Stress LinearizationDokument15 SeitenANSYS Stress LinearizationTiago CandeiasNoch keine Bewertungen
- Calculus For Business and Social SciencesDokument5 SeitenCalculus For Business and Social SciencesMarchol PingkiNoch keine Bewertungen