Das könnte Ihnen auch gefallen
- Ecsr B Tb006Dokument33 SeitenEcsr B Tb006Nishant VermaNoch keine Bewertungen
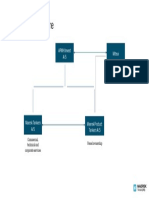
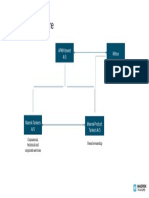
- Ownership Structure Maersk Tankers PDFDokument1 SeiteOwnership Structure Maersk Tankers PDFNishant VermaNoch keine Bewertungen
- Since 1990: Jindal Aluminium Ltd. & Hindalco ExtrusionsDokument14 SeitenSince 1990: Jindal Aluminium Ltd. & Hindalco ExtrusionsNishant VermaNoch keine Bewertungen
- Ownership Structure Maersk TankersDokument1 SeiteOwnership Structure Maersk TankersNishant VermaNoch keine Bewertungen
- Ui Ll64 Rev5Dokument2 SeitenUi Ll64 Rev5Nishant VermaNoch keine Bewertungen
- Hiding Certain Elements in ResultsDokument3 SeitenHiding Certain Elements in ResultsNishant VermaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Fortune Express Vs CA DigestDokument2 SeitenFortune Express Vs CA DigestKryzel V. LaurenaNoch keine Bewertungen
- 4.2 - Automatic Transmission (OCR)Dokument156 Seiten4.2 - Automatic Transmission (OCR)mnbvqwertNoch keine Bewertungen
- Parts Manual Di1611 Konica 7216Dokument53 SeitenParts Manual Di1611 Konica 7216vagmixNoch keine Bewertungen
- Bearing Pad "A" Bearing Pad "B": Bd-Id1EDokument11 SeitenBearing Pad "A" Bearing Pad "B": Bd-Id1EJUAN RULFONoch keine Bewertungen
- Lrs 3Dokument1 SeiteLrs 3Ken Lee100% (1)
- TMX Parking Brake FlierDokument2 SeitenTMX Parking Brake FlierJeremiah WalkerNoch keine Bewertungen
- Adani Ports & SEZ - Investor PresentationDokument24 SeitenAdani Ports & SEZ - Investor PresentationRamesh Oberoi100% (1)
- BuslistsonthewebDokument39 SeitenBuslistsonthewebNoelia Peirats AymerichNoch keine Bewertungen
- Stockpile Loading SolutionsDokument1 SeiteStockpile Loading SolutionscwiseinternationalNoch keine Bewertungen
- Erica 2Dokument1 SeiteErica 2A L TEIXEIRANoch keine Bewertungen
- School ListDokument4 SeitenSchool Listparulsingh80Noch keine Bewertungen
- China Airlines v. ChiokDokument2 SeitenChina Airlines v. ChiokVince MontealtoNoch keine Bewertungen
- Fumigation of Cargo On Board Ships: The Invisible KillerDokument7 SeitenFumigation of Cargo On Board Ships: The Invisible KillerAnakin SkywalkerNoch keine Bewertungen
- Lecture 2 Tire FundamentalsDokument17 SeitenLecture 2 Tire FundamentalsabasNoch keine Bewertungen
- 18SP546 (Search-Manual-Online - Com) PDFDokument8 Seiten18SP546 (Search-Manual-Online - Com) PDFJesus Vega HummerNoch keine Bewertungen
- Security Officer/GuardDokument2 SeitenSecurity Officer/Guardapi-121358674Noch keine Bewertungen
- WCL2106D 0FDokument430 SeitenWCL2106D 0FTri Haryono100% (3)
- MITSUBISHI Engines IdentificationDokument5 SeitenMITSUBISHI Engines IdentificationHameed25% (4)
- RS150 (K56J) PartsCatalogue2016Dokument116 SeitenRS150 (K56J) PartsCatalogue2016gdon86% (7)
- Zlj5480jqzv3 Spare Parts CatalogDokument244 SeitenZlj5480jqzv3 Spare Parts Catalogmliugong100% (1)
- Case Study: Nepal Airlines Corporation (NAC) : December 2016Dokument25 SeitenCase Study: Nepal Airlines Corporation (NAC) : December 2016Sushma chhetriNoch keine Bewertungen
- Biko 12 Pag. GBDokument12 SeitenBiko 12 Pag. GBMUFİTNoch keine Bewertungen
- Odyssey Papers 03 - The Jacksonville Blue China' Shipwreck & The Myth of Deep-Sea PreservationDokument13 SeitenOdyssey Papers 03 - The Jacksonville Blue China' Shipwreck & The Myth of Deep-Sea PreservationVittorio SerafinNoch keine Bewertungen
- Pakistan Railway1Dokument48 SeitenPakistan Railway1Sam's CollectionNoch keine Bewertungen
- Reading On BuildingDokument2 SeitenReading On BuildingJorgeMCNoch keine Bewertungen
- Employee Name Employee No. Vehicle No Test Date Exp. Date Emission Report (Yes/ No)Dokument3 SeitenEmployee Name Employee No. Vehicle No Test Date Exp. Date Emission Report (Yes/ No)prashanthNoch keine Bewertungen
- Master of Commerce: 1 YearDokument8 SeitenMaster of Commerce: 1 YearAston Rahul PintoNoch keine Bewertungen
- Moam - Info Freefall Lifeboat Type GFF 57m With Sliding Ramp H 919Dokument1 SeiteMoam - Info Freefall Lifeboat Type GFF 57m With Sliding Ramp H 919Anton LunevNoch keine Bewertungen
- Task Force For Technical Investigation of The 24 March 1999 Fire in The Mont Blanc Vehicular Tunnel (2012)Dokument49 SeitenTask Force For Technical Investigation of The 24 March 1999 Fire in The Mont Blanc Vehicular Tunnel (2012)nakyunghanNoch keine Bewertungen