Das könnte Ihnen auch gefallen
- Structure Maintainer, Group H (Air Conditioning & Heating): Passbooks Study GuideVon EverandStructure Maintainer, Group H (Air Conditioning & Heating): Passbooks Study GuideNoch keine Bewertungen
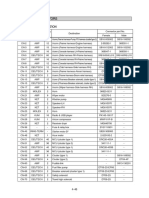
- Design Data & References: Unit Tag StationDokument12 SeitenDesign Data & References: Unit Tag StationAdnan AttishNoch keine Bewertungen
- Equest Modeling Procedures Quick ReferenceDokument182 SeitenEquest Modeling Procedures Quick Referencesimonsahi100% (1)
- 06 Ncbc-2011-Ebcx Processes Results-JacobsDokument39 Seiten06 Ncbc-2011-Ebcx Processes Results-JacobssupercheleroNoch keine Bewertungen
- AT03a BldgEnergyAuditor JTADokument65 SeitenAT03a BldgEnergyAuditor JTAJohnathan AdlamNoch keine Bewertungen
- Saving Energy in Lab Exhaust SystemsDokument11 SeitenSaving Energy in Lab Exhaust Systemspal_stephenNoch keine Bewertungen
- Blower Door Testing: The Contractor's Great MotivatorDokument27 SeitenBlower Door Testing: The Contractor's Great MotivatorRob HoskenNoch keine Bewertungen
- HVAC Chapters 1 5Dokument57 SeitenHVAC Chapters 1 5Mcilwaine Dela CruzNoch keine Bewertungen
- Sump Pit CalculationDokument1 SeiteSump Pit CalculationRaoofNoch keine Bewertungen
- Ashrae Std100-2015 6c.1spurrDokument8 SeitenAshrae Std100-2015 6c.1spurrAbdry50Noch keine Bewertungen
- Premium-Content CBSHeatingGuide en INT Article-LearningDokument54 SeitenPremium-Content CBSHeatingGuide en INT Article-Learning185412Noch keine Bewertungen
- AshraeDokument6 SeitenAshraeLuis Fernando Zapata CardonaNoch keine Bewertungen
- What Constit Tutes A Quality Commissioning JobDokument43 SeitenWhat Constit Tutes A Quality Commissioning JobAnonymous sSFrqPbfL9Noch keine Bewertungen
- Commissioning Chilled Water TES Tank Systems: Technical FeatureDokument10 SeitenCommissioning Chilled Water TES Tank Systems: Technical FeatureJuan Fernando AriasNoch keine Bewertungen
- 383 NO28 EnergyModeliing 2013Dokument23 Seiten383 NO28 EnergyModeliing 2013Parvez SaifNoch keine Bewertungen
- TAIL Index For Rating IEQ ASHRAE DEC 2019Dokument3 SeitenTAIL Index For Rating IEQ ASHRAE DEC 2019raguNoch keine Bewertungen
- Adm Apn005 enDokument8 SeitenAdm Apn005 enNeal JohnsonNoch keine Bewertungen
- Designbuilder // Energyplus Designbuilder // Energyplus: Tutorial #1'Dokument66 SeitenDesignbuilder // Energyplus Designbuilder // Energyplus: Tutorial #1'rxp2007Noch keine Bewertungen
- Energy Efficient Educational Buildings-5 PDFDokument27 SeitenEnergy Efficient Educational Buildings-5 PDFMohammad Art123Noch keine Bewertungen
- CIV238 U1 L2 Types of Water DemandDokument32 SeitenCIV238 U1 L2 Types of Water DemandSumit Kumar Sinha100% (1)
- District Cooling Guide Second Edition - Unlocked-2Dokument2 SeitenDistrict Cooling Guide Second Edition - Unlocked-2Ahmed LabibNoch keine Bewertungen
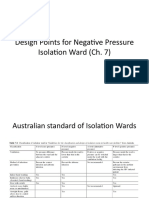
- Design Points For Negative PressureDokument23 SeitenDesign Points For Negative PressureShohei Namjoon LetoNoch keine Bewertungen
- AHU Operational Control Spreadsheet TrainingDokument17 SeitenAHU Operational Control Spreadsheet TrainingSilver ManNoch keine Bewertungen
- Cold Air Distribution SystemDokument11 SeitenCold Air Distribution Systemsushant_jhawerNoch keine Bewertungen
- HVAC Syllabus PDFDokument1 SeiteHVAC Syllabus PDFPiyush PandeyNoch keine Bewertungen
- BGHandbook MultiFamily PDFDokument348 SeitenBGHandbook MultiFamily PDFMichelle MannNoch keine Bewertungen
- 2022-Air-To-Water Heat Pumps - Review and Analysis of The Performance Gap Between In-Use and Product Rated Performance PDFDokument21 Seiten2022-Air-To-Water Heat Pumps - Review and Analysis of The Performance Gap Between In-Use and Product Rated Performance PDFCojanu ClaudiuNoch keine Bewertungen
- HVAC Report FINALDokument65 SeitenHVAC Report FINALIanNoch keine Bewertungen
- MDS Design and Installation GuideDokument120 SeitenMDS Design and Installation GuideDita Ayu Rani NNoch keine Bewertungen
- Tear Cooling Tower Energy Operating Cost SoftwareDokument9 SeitenTear Cooling Tower Energy Operating Cost Softwareforevertay2000Noch keine Bewertungen
- HPT Optimizing Outside Air With HPTDokument11 SeitenHPT Optimizing Outside Air With HPTNGUYEN QUANGNoch keine Bewertungen
- Sys-Am-14 Designing An 'Iaq Ready' Air Handler SystemDokument71 SeitenSys-Am-14 Designing An 'Iaq Ready' Air Handler SystemtpqnhatNoch keine Bewertungen
- 28915kavanaugh PDFDokument6 Seiten28915kavanaugh PDFRafael Echano AcederaNoch keine Bewertungen
- Hong Kong Building Energy Code 2012Dokument70 SeitenHong Kong Building Energy Code 2012Sam C M HuiNoch keine Bewertungen
- Water Cooled Chiller Plant (All-Variable) : Design Envelope Application GuideDokument10 SeitenWater Cooled Chiller Plant (All-Variable) : Design Envelope Application GuideKaushikNoch keine Bewertungen
- HVAC Load Calculation FundamentalsDokument3 SeitenHVAC Load Calculation Fundamentalssivajirao70Noch keine Bewertungen
- TN56 DuctworkDokument62 SeitenTN56 DuctworkmemoooNoch keine Bewertungen
- SPD4121 1617 05-Load PDFDokument60 SeitenSPD4121 1617 05-Load PDFMukti WibowoNoch keine Bewertungen
- AHRI Guideline T 2002Dokument16 SeitenAHRI Guideline T 2002trangweicoNoch keine Bewertungen
- Kitchen V: Entilation UpdateDokument59 SeitenKitchen V: Entilation UpdatekazawaliNoch keine Bewertungen
- Load Calculation Spreadsheets: Quick Answers Without Relying On Rules of ThumbDokument7 SeitenLoad Calculation Spreadsheets: Quick Answers Without Relying On Rules of ThumbMhil ParasNoch keine Bewertungen
- AIA DHHS Ventilation Requirements For Areas Affecting Patient Care in HospitalsDokument4 SeitenAIA DHHS Ventilation Requirements For Areas Affecting Patient Care in HospitalsMahipal Singh RaoNoch keine Bewertungen
- Energy Modeling2Dokument66 SeitenEnergy Modeling2noveNoch keine Bewertungen
- Sustainable Design Requirements-ADDDokument16 SeitenSustainable Design Requirements-ADDsreedeviNoch keine Bewertungen
- Capacity Calculation of Fire Hose Pumps: Friction Loss RatesDokument1 SeiteCapacity Calculation of Fire Hose Pumps: Friction Loss RatesCharitha Ranwala100% (1)
- ENGI 273 Lec 5Dokument48 SeitenENGI 273 Lec 5Haidy T. SakrNoch keine Bewertungen
- Chapter 22Dokument22 SeitenChapter 22Kenneth Bryan Miguel Villagoneza100% (1)
- Water Cooled Chiller Plant With Economiser (VP) : Data CenterDokument10 SeitenWater Cooled Chiller Plant With Economiser (VP) : Data CenterFirasNoch keine Bewertungen
- Bbse2001 1011 Elect02Dokument48 SeitenBbse2001 1011 Elect02kelvincmlauNoch keine Bewertungen
- Ashrae ChartDokument1 SeiteAshrae Chartalone160162lNoch keine Bewertungen
- 3 Psychrometrics March 2014 SlidesDokument78 Seiten3 Psychrometrics March 2014 Slidespaai1989_679523114Noch keine Bewertungen
- LEED Application GuideDokument40 SeitenLEED Application GuidejonathandacumosNoch keine Bewertungen
- Simulation Tool ComparisonDokument8 SeitenSimulation Tool ComparisonsmautifNoch keine Bewertungen
- Variable Flow Chiller Plant Design PDFDokument28 SeitenVariable Flow Chiller Plant Design PDFLeed ENNoch keine Bewertungen
- Serbia Cleanrooms Seminar 1Dokument46 SeitenSerbia Cleanrooms Seminar 1Иван ШимчукNoch keine Bewertungen
- HVAC Psychrometric Analysis To Avoid Moisture ProblemsDokument30 SeitenHVAC Psychrometric Analysis To Avoid Moisture ProblemsmohdrashidNoch keine Bewertungen
- Case Against Balancing ValvesDokument4 SeitenCase Against Balancing ValvesAslam AhamedNoch keine Bewertungen
- Study of The Centrifugal Pump Efficiency at Throttling and Speed ControlDokument4 SeitenStudy of The Centrifugal Pump Efficiency at Throttling and Speed ControlHassan SouleymanNoch keine Bewertungen
- 12 Bus Test SystemDokument3 Seiten12 Bus Test SystemWilson VasquezNoch keine Bewertungen
- IRD1-G: Differential Protection Relay For Generators and MotorsDokument24 SeitenIRD1-G: Differential Protection Relay For Generators and MotorsTaufiqtadNoch keine Bewertungen
- ATS PANELS 2018 FOR Nov 29th 2018Dokument14 SeitenATS PANELS 2018 FOR Nov 29th 2018zainahmedscribdNoch keine Bewertungen
- EPEVER Datasheet Tracer An 50 100ADokument3 SeitenEPEVER Datasheet Tracer An 50 100AAmien Haja0% (1)
- Steca PR Productdatasheet ENDokument1 SeiteSteca PR Productdatasheet ENAnaNoch keine Bewertungen
- Order Form: Item Code Category Qty - Sold On-Hand Order Group BDokument9 SeitenOrder Form: Item Code Category Qty - Sold On-Hand Order Group BAlleine TupazNoch keine Bewertungen
- Solution Manual Power System Protection by PaithankarDokument6 SeitenSolution Manual Power System Protection by PaithankarHaseeb Nawaz64% (11)
- BA10339FVDokument5 SeitenBA10339FVPot GeeAdmitNoch keine Bewertungen
- Resilite 2735Dokument2 SeitenResilite 2735pwmvsi100% (1)
- Topswitch: Designing Multiple Output Flyback Power Supplies WithDokument24 SeitenTopswitch: Designing Multiple Output Flyback Power Supplies WithHải TrầnNoch keine Bewertungen
- SCXI-1382 12V 26ah Battery Pack 371189bDokument7 SeitenSCXI-1382 12V 26ah Battery Pack 371189bTrung Lung TungNoch keine Bewertungen
- Part Number: Status: Overview: Description:: DocumentsDokument2 SeitenPart Number: Status: Overview: Description:: DocumentsMonika MaláskováNoch keine Bewertungen
- Indian Railways Standard Specification FOR Audio Frequency Track Circuit SERIAL NO RDSO/SPN/146/2001Dokument16 SeitenIndian Railways Standard Specification FOR Audio Frequency Track Circuit SERIAL NO RDSO/SPN/146/2001Pooja SinghNoch keine Bewertungen
- Introduction To Relay: Presented by STES Group LTDDokument18 SeitenIntroduction To Relay: Presented by STES Group LTDMugisha EdwinNoch keine Bewertungen
- TRIO-5.8/7.5/8.5-TL-OUTD 5.8 To 8.5 KW: ABB String InvertersDokument4 SeitenTRIO-5.8/7.5/8.5-TL-OUTD 5.8 To 8.5 KW: ABB String InverterstoniengNoch keine Bewertungen
- PCC Commissioning Guide LinesDokument21 SeitenPCC Commissioning Guide LinesSyed Mohammad Naveed100% (7)
- Electrical Basis of Design Standards GuidelinesDokument19 SeitenElectrical Basis of Design Standards Guidelinesessk100% (1)
- NewDokument20 SeitenNew32mwomplNoch keine Bewertungen
- 4 4Dokument23 Seiten4 4علوي الهاشميNoch keine Bewertungen
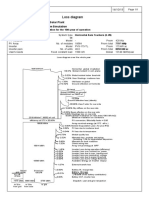
- Loss DiagramDokument1 SeiteLoss DiagramAahd GhafriNoch keine Bewertungen
- Comparative Evaluation of Single-Phase Unity Power FactorDokument8 SeitenComparative Evaluation of Single-Phase Unity Power Factorlipika008Noch keine Bewertungen
- Eng. Umar CV12Dokument6 SeitenEng. Umar CV12Zeeshan YasinNoch keine Bewertungen
- Connection Systems CatalogDokument103 SeitenConnection Systems CatalogRicardo PerroneNoch keine Bewertungen
- Physics Investigatory Project On Joule ThiefDokument5 SeitenPhysics Investigatory Project On Joule ThiefathuNoch keine Bewertungen
- BEME Distribution TransformerDokument4 SeitenBEME Distribution TransformerMubarak AleemNoch keine Bewertungen
- Portable Emergency Unit: Compact, Robust and Easy To HandleDokument2 SeitenPortable Emergency Unit: Compact, Robust and Easy To HandleMamadou Ténéma TRAORENoch keine Bewertungen
- ECE330 Final Exam Sample FormulaSheetDokument2 SeitenECE330 Final Exam Sample FormulaSheetNguyễn TàiNoch keine Bewertungen
- Relay Co-Ordination AND Relay Setting ReportDokument15 SeitenRelay Co-Ordination AND Relay Setting Reportsougata mukherjeeNoch keine Bewertungen
- BOQDokument3 SeitenBOQakshaykumardNoch keine Bewertungen
- Very Low Drop Voltage Regulator: DescriptionDokument8 SeitenVery Low Drop Voltage Regulator: DescriptionJhonatan CervantesNoch keine Bewertungen
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesVon EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- Idaho Falls: The Untold Story of America's First Nuclear AccidentVon EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Electric Motor Control: DC, AC, and BLDC MotorsVon EverandElectric Motor Control: DC, AC, and BLDC MotorsBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Handbook on Battery Energy Storage SystemVon EverandHandbook on Battery Energy Storage SystemBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Well Integrity for Workovers and RecompletionsVon EverandWell Integrity for Workovers and RecompletionsBewertung: 5 von 5 Sternen5/5 (3)
- Solar Energy: Survive Easily on Solar Power Off the GridVon EverandSolar Energy: Survive Easily on Solar Power Off the GridNoch keine Bewertungen
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingVon EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNoch keine Bewertungen
- Electric Motors and Drives: Fundamentals, Types and ApplicationsVon EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsBewertung: 4.5 von 5 Sternen4.5/5 (12)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialVon EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNoch keine Bewertungen
- Thermal Power Plant: Design and OperationVon EverandThermal Power Plant: Design and OperationBewertung: 4.5 von 5 Sternen4.5/5 (23)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsVon EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsVon EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsVon EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsNoch keine Bewertungen
- Flow Analysis for Hydrocarbon Pipeline EngineeringVon EverandFlow Analysis for Hydrocarbon Pipeline EngineeringNoch keine Bewertungen
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AVon EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANoch keine Bewertungen
- Heat Transfer Engineering: Fundamentals and TechniquesVon EverandHeat Transfer Engineering: Fundamentals and TechniquesBewertung: 4 von 5 Sternen4/5 (1)
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen
- Shorting the Grid: The Hidden Fragility of Our Electric GridVon EverandShorting the Grid: The Hidden Fragility of Our Electric GridBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Well Control for Completions and InterventionsVon EverandWell Control for Completions and InterventionsBewertung: 4 von 5 Sternen4/5 (10)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsVon EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNoch keine Bewertungen
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsVon EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsNoch keine Bewertungen
- Pipeline and Energy Plant Piping: Design and TechnologyVon EverandPipeline and Energy Plant Piping: Design and TechnologyBewertung: 5 von 5 Sternen5/5 (2)