Das könnte Ihnen auch gefallen
- Teoría Resumen MessiDokument50 SeitenTeoría Resumen MessiMelina Marcón AsetNoch keine Bewertungen
- Preinforme - Práctica de Control Grupo DDokument23 SeitenPreinforme - Práctica de Control Grupo DDiego Fernando CuellarNoch keine Bewertungen
- Control Por Realimentacion o FeedbackDokument27 SeitenControl Por Realimentacion o FeedbackDiego Dt100% (2)
- Control Avanzado Lab2 InformeDokument20 SeitenControl Avanzado Lab2 InformeBranco Costa OrtegaNoch keine Bewertungen
- Control - Sintonia de Controladores PID Por Ziegler NicholsDokument12 SeitenControl - Sintonia de Controladores PID Por Ziegler NicholsLuis Alberto SD100% (2)
- Modos de ControlDokument17 SeitenModos de ControlFanny Plaza100% (1)
- Reporte de Investigación Unidad 4: ControladoresDokument10 SeitenReporte de Investigación Unidad 4: ControladoresIván OsorioNoch keine Bewertungen
- Trabajo Final Control TerminalDokument29 SeitenTrabajo Final Control TerminalmrvelandiacNoch keine Bewertungen
- Control ProporcionalDokument10 SeitenControl ProporcionalKike DersúNoch keine Bewertungen
- MECA CA Act3 P3Dokument9 SeitenMECA CA Act3 P3JESUS RODRIGUEZ0% (1)
- Resumen de Los Subtema 4.2 Al 4.5 ConcepcionDokument13 SeitenResumen de Los Subtema 4.2 Al 4.5 ConcepcionJose JimenezNoch keine Bewertungen
- Control PID para Un Motor DC Controlado Por ArmaduraDokument17 SeitenControl PID para Un Motor DC Controlado Por ArmaduraRicharson OchoaNoch keine Bewertungen
- Instrumentacion MadisonDokument41 SeitenInstrumentacion MadisonMadison Arévalo LópezNoch keine Bewertungen
- Acción de Control de Dos Posiciones o de Encendido y ApagadoDokument5 SeitenAcción de Control de Dos Posiciones o de Encendido y ApagadoEvelyn ArredondoNoch keine Bewertungen
- Problemas y Acciones de ControlDokument39 SeitenProblemas y Acciones de ControlAlbertina OlivaresNoch keine Bewertungen
- Unidad 4 InstrumentacionDokument14 SeitenUnidad 4 InstrumentacionJoselyn TorcuatoNoch keine Bewertungen
- Actividad 13 Equipo 10.Dokument7 SeitenActividad 13 Equipo 10.Cesar Mauricio Sanchez AlejandroNoch keine Bewertungen
- ME 6 ControladoresDokument29 SeitenME 6 ControladoresJorgeNoch keine Bewertungen
- Modos de Control Aplicados en InstrumentaciónDokument5 SeitenModos de Control Aplicados en InstrumentaciónVictor Mares0% (1)
- CA 9B P3 Trujillo Ocaña.Dokument12 SeitenCA 9B P3 Trujillo Ocaña.cato061001Noch keine Bewertungen
- Practica de Controladores PD, PI, PDIDokument7 SeitenPractica de Controladores PD, PI, PDIJce Svu100% (2)
- CONTROLADORES y Acciones de ControlDokument8 SeitenCONTROLADORES y Acciones de ControlHaide GarciaNoch keine Bewertungen
- Unidad 4 ControladoresDokument18 SeitenUnidad 4 ControladoresGlobos LugrimNoch keine Bewertungen
- Ejemplos Basicos de Sistemas de ControlDokument95 SeitenEjemplos Basicos de Sistemas de ControlGabriel Gamarra LimayNoch keine Bewertungen
- Unid4 Sem13Dokument40 SeitenUnid4 Sem13Diego OmarNoch keine Bewertungen
- Informe de Controladores PIDDokument20 SeitenInforme de Controladores PIDfranco_3210_Noch keine Bewertungen
- Conceptos Basicos de Control PidDokument7 SeitenConceptos Basicos de Control PidSergioNoch keine Bewertungen
- Laboratorio 2 - Controladores de ProcesosDokument6 SeitenLaboratorio 2 - Controladores de Procesosgeiner peraltaNoch keine Bewertungen
- Lab 6Dokument6 SeitenLab 6Oliver Gálvez ZavaletaNoch keine Bewertungen
- PDF Reporte de Investigacion Unidad 4 ControladoresDokument16 SeitenPDF Reporte de Investigacion Unidad 4 ControladoresRicardo Hernandez bustosNoch keine Bewertungen
- Acciones de Control ProporcionalDokument4 SeitenAcciones de Control ProporcionalLucssssNoch keine Bewertungen
- Elementos de Un Sistema de ControlDokument4 SeitenElementos de Un Sistema de ControlskailarkkkNoch keine Bewertungen
- PIDDokument40 SeitenPIDAlexisVizueteNoch keine Bewertungen
- Control PID Temperatura ValvulaDokument18 SeitenControl PID Temperatura ValvulaLuis FonsecaNoch keine Bewertungen
- EXAMEN1ADokument3 SeitenEXAMEN1AAlberto CabreraNoch keine Bewertungen
- ControladoresDokument95 SeitenControladoresMicaela Guzman BolivarNoch keine Bewertungen
- Trabajo Métodos de EntonaciónDokument22 SeitenTrabajo Métodos de EntonaciónCarlos QuintanillaNoch keine Bewertungen
- Control PIDDokument52 SeitenControl PIDLuis Alfredo Gomez LlancaleoNoch keine Bewertungen
- Sintonia de Controladores - JFMMDokument12 SeitenSintonia de Controladores - JFMMsantiago giraldoNoch keine Bewertungen
- Tema2.1 - Introduccion Al Diseño de Sistemas de ControlDokument47 SeitenTema2.1 - Introduccion Al Diseño de Sistemas de ControlJuan Carlos Leon Martinez100% (1)
- Informe Examen FinalDokument15 SeitenInforme Examen FinalGustavo CeccarelliNoch keine Bewertungen
- Análisis Dinámico de Un ControladorDokument32 SeitenAnálisis Dinámico de Un ControladorJuan Roldán Castillo100% (1)
- Control en Cascada Modulo de PresionDokument7 SeitenControl en Cascada Modulo de PresionJesus David Garcia MarmolNoch keine Bewertungen
- Proyecto Pendulo InvertidoDokument13 SeitenProyecto Pendulo InvertidoJohn WinchesterNoch keine Bewertungen
- 9.02 Control de P, I, D, PI, PD y PIDDokument16 Seiten9.02 Control de P, I, D, PI, PD y PIDEdgarPalaciosCNoch keine Bewertungen
- Acciones de ControlDokument51 SeitenAcciones de ControlIgnacio MarquezNoch keine Bewertungen
- Lab 3 (19-I)Dokument10 SeitenLab 3 (19-I)Walther JesusNoch keine Bewertungen
- Control AdoresDokument10 SeitenControl AdoresAngélica Rodríguez CarrascoNoch keine Bewertungen
- Acciones Basicas de ControlDokument20 SeitenAcciones Basicas de ControlrichardlivNoch keine Bewertungen
- Dinámica de Tanques de DrenajeDokument5 SeitenDinámica de Tanques de DrenajeGustavo VilcapazaNoch keine Bewertungen
- Análisis y Diseño de Controladores en El TiempoDokument23 SeitenAnálisis y Diseño de Controladores en El Tiemporoberto roblesNoch keine Bewertungen
- Control Intercambiador de CalorDokument17 SeitenControl Intercambiador de Calorandresfel48100% (1)
- LAB 14 PLC Avance de ProyectoDokument11 SeitenLAB 14 PLC Avance de ProyectoBrando Castillo ChoquehuancaNoch keine Bewertungen
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Von EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Bewertung: 4.5 von 5 Sternen4.5/5 (8)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasVon EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasBewertung: 5 von 5 Sternen5/5 (1)
- Ejercicios de Integrales de Línea, Superficie y VolumenVon EverandEjercicios de Integrales de Línea, Superficie y VolumenBewertung: 4 von 5 Sternen4/5 (2)
- Identificacion de ModelosDokument13 SeitenIdentificacion de ModelosMarquinho GroberNoch keine Bewertungen
- Clase VI - Teoria de ControlDokument29 SeitenClase VI - Teoria de ControlmilerNoch keine Bewertungen
- ALTOMAYO-eva Eli y BrigidaDokument18 SeitenALTOMAYO-eva Eli y Brigidaeva robles huamaniNoch keine Bewertungen
- Sistemas de Tiempo DiscretoDokument9 SeitenSistemas de Tiempo DiscretoJosé Carlos Turpo QuiroNoch keine Bewertungen
- Investigación Control IIDokument87 SeitenInvestigación Control IImario gomezNoch keine Bewertungen
- Solucion Examen Electronica DigitalDokument7 SeitenSolucion Examen Electronica DigitalEstherNoch keine Bewertungen
- Coso 1 y Coso 2Dokument6 SeitenCoso 1 y Coso 2Ruben CaballeroNoch keine Bewertungen
- Predictivo Adaptativo RobustoDokument24 SeitenPredictivo Adaptativo RobustoGeorgeMarrinesNoch keine Bewertungen
- Informe Mantenimiento PLCDokument5 SeitenInforme Mantenimiento PLCDennisIncacutipaNoch keine Bewertungen
- Tarea #5 Lugar Geometrico de Las RaicesDokument4 SeitenTarea #5 Lugar Geometrico de Las RaicesRuben BarriaNoch keine Bewertungen
- Anexo B CcreusDokument36 SeitenAnexo B CcreuscarlsNoch keine Bewertungen
- Decargar - Control Electronico de Cajas AutomaticasDokument18 SeitenDecargar - Control Electronico de Cajas AutomaticasMayjok Garage San Juan del Rio100% (1)
- 08 C5 Estabilidad Transitoria en El SINDokument31 Seiten08 C5 Estabilidad Transitoria en El SINpcelisNoch keine Bewertungen
- Ingenieria ControlDokument171 SeitenIngenieria ControlDania Sosa MartinezNoch keine Bewertungen
- Sistemas de Control DistribuidoDokument30 SeitenSistemas de Control DistribuidoEdson MoralesNoch keine Bewertungen
- Control de Rango DivididoDokument3 SeitenControl de Rango DivididoWiliee Juarez50% (2)
- InfoPLC Net Guia 7 Controladores PIDDokument18 SeitenInfoPLC Net Guia 7 Controladores PIDSebastian ISNoch keine Bewertungen
- Informe InstrumentacionDokument7 SeitenInforme InstrumentacionAndrewRNoch keine Bewertungen
- Funciones de Transferencias de SistemasDokument9 SeitenFunciones de Transferencias de SistemasAlex AndradeNoch keine Bewertungen
- P07 ConPresionDokument19 SeitenP07 ConPresionAmadoEsparzaNoch keine Bewertungen
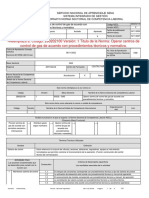
- Reemplaza A: Código: 280202100 Versión: 1 Titulo de La Norma: Operar Centros de Control de Gas de Acuerdo Con Procedimientos Técnicos y NormativaDokument5 SeitenReemplaza A: Código: 280202100 Versión: 1 Titulo de La Norma: Operar Centros de Control de Gas de Acuerdo Con Procedimientos Técnicos y NormativaPoligranNoch keine Bewertungen
- 1.fundamentos de La Instrumentacion IndustrialDokument99 Seiten1.fundamentos de La Instrumentacion IndustrialEnderson OrtegaNoch keine Bewertungen
- Arquitecturas de Sistemas de ControlDokument5 SeitenArquitecturas de Sistemas de ControlJonathan Rangel100% (1)
- 1.5.-Informe de Aplicación Norma NCC21Dokument17 Seiten1.5.-Informe de Aplicación Norma NCC21Carlos Fernando Pizarro CuevasNoch keine Bewertungen
- 10 Introduccion A La Fase de ControlDokument21 Seiten10 Introduccion A La Fase de ControlMartínez JulioNoch keine Bewertungen
- DirectoresDokument89 SeitenDirectoresLUIS0304Noch keine Bewertungen
- Informe - Lab 19 - Control DifusoDokument19 SeitenInforme - Lab 19 - Control DifusoAngie Morales Moreno0% (1)
- Tarea 7Dokument5 SeitenTarea 7Miguel Andres Ortega SierraNoch keine Bewertungen
- Ingenieria de Control II.Dokument193 SeitenIngenieria de Control II.hamscribdNoch keine Bewertungen