Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Inductively Coupled PlasmaDokument8 SeitenInductively Coupled Plasmagerarjui100% (1)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Saes T 000 PDFDokument10 SeitenSaes T 000 PDFsvrao4uNoch keine Bewertungen
- All-Wheel Drive Four-Wheel Drive Systems and Strategies PDFDokument7 SeitenAll-Wheel Drive Four-Wheel Drive Systems and Strategies PDFjohn ayengahNoch keine Bewertungen
- 1088 HD Camera Operating ManualDokument46 Seiten1088 HD Camera Operating ManualSn Dayanidhi100% (1)
- TM 9 6230 210 13p Floodlight SetDokument264 SeitenTM 9 6230 210 13p Floodlight SetAdvocateNoch keine Bewertungen
- 9500 MPR Product DescriptionDokument79 Seiten9500 MPR Product DescriptionRoger Juan Gomez Ramirez100% (1)
- A Complete Ensemble Empirical Mode DecompositionDokument4 SeitenA Complete Ensemble Empirical Mode DecompositionArturo Ga PeNoch keine Bewertungen
- Induction Machine Fault Detection EnhancementDokument6 SeitenInduction Machine Fault Detection EnhancementArturo Ga PeNoch keine Bewertungen
- Reliable Detection of Induction Motor Rotor FaultsDokument9 SeitenReliable Detection of Induction Motor Rotor FaultsArturo Ga PeNoch keine Bewertungen
- A MUSIC-Based Method To Detect Broken RotorDokument4 SeitenA MUSIC-Based Method To Detect Broken RotorArturo Ga PeNoch keine Bewertungen
- A High-Resolution Frequency Estimation Method ForDokument10 SeitenA High-Resolution Frequency Estimation Method ForArturo Ga PeNoch keine Bewertungen
- Startup Current Analysis of Incipient Broken Rotor Bar in PDFDokument7 SeitenStartup Current Analysis of Incipient Broken Rotor Bar in PDFArturo Ga PeNoch keine Bewertungen
- Induction Machine Fault Detection EnhancementDokument6 SeitenInduction Machine Fault Detection EnhancementArturo Ga PeNoch keine Bewertungen
- Reliable Detection of Induction Motor Rotor FaultsDokument9 SeitenReliable Detection of Induction Motor Rotor FaultsArturo Ga PeNoch keine Bewertungen
- Broken Bar Condition Monitoring of An Induction Motor Under PDFDokument7 SeitenBroken Bar Condition Monitoring of An Induction Motor Under PDFArturo Ga PeNoch keine Bewertungen
- Fourier Methods of Spectral Estimation PDFDokument44 SeitenFourier Methods of Spectral Estimation PDFArturo Ga PeNoch keine Bewertungen
- Broken Bar Condition Monitoring of An Induction Motor Under PDFDokument7 SeitenBroken Bar Condition Monitoring of An Induction Motor Under PDFArturo Ga PeNoch keine Bewertungen
- Lecture Notes 13Dokument16 SeitenLecture Notes 13Arturo Ga PeNoch keine Bewertungen
- Ec4440 III DLDokument49 SeitenEc4440 III DLArturo Ga PeNoch keine Bewertungen
- Fourier Methods of Spectral Estimation PDFDokument44 SeitenFourier Methods of Spectral Estimation PDFArturo Ga PeNoch keine Bewertungen
- Vibration Transient DetectionDokument7 SeitenVibration Transient DetectionArturo Ga PeNoch keine Bewertungen
- Fractional Calculus Based Processing For Feature Extraction in Harmonic Polluted Fault Monitoring SystemsDokument15 SeitenFractional Calculus Based Processing For Feature Extraction in Harmonic Polluted Fault Monitoring SystemsArturo Ga PeNoch keine Bewertungen
- Random ProcessesDokument47 SeitenRandom ProcessesArturo Ga PeNoch keine Bewertungen
- InTech-Time Frequency Transforms For Classification of Power Quality DisturbancesDokument18 SeitenInTech-Time Frequency Transforms For Classification of Power Quality DisturbancesArturo Ga PeNoch keine Bewertungen
- A New Approach For Induction Motor Broken Bar Diagnosis by Using Vibration SpectrumDokument6 SeitenA New Approach For Induction Motor Broken Bar Diagnosis by Using Vibration SpectrumArturo Ga PeNoch keine Bewertungen
- Broken Rotor Bar DetBroken Rotor Bar Detection in Variableection in VariableDokument5 SeitenBroken Rotor Bar DetBroken Rotor Bar Detection in Variableection in VariableArturo Ga PeNoch keine Bewertungen
- E LBP Mcoq Mod 13.10 IfeDokument9 SeitenE LBP Mcoq Mod 13.10 IfearunNoch keine Bewertungen
- TTLDokument31 SeitenTTLLembar Firdillah KurniawanNoch keine Bewertungen
- Plano Antena Yagi Frecuencia 850 MHZDokument2 SeitenPlano Antena Yagi Frecuencia 850 MHZageroNoch keine Bewertungen
- EVE ReportDokument8 SeitenEVE ReportMARY SIRACH DELA TORRENoch keine Bewertungen
- Arno ConverterDokument3 SeitenArno ConverterFariha shaikhNoch keine Bewertungen
- E9180 PDFDokument14 SeitenE9180 PDFGlauber RodriguesNoch keine Bewertungen
- Mitsubishi Electric PURY-P YLM-A1 PURY-EP YLM A Service Manual EngDokument434 SeitenMitsubishi Electric PURY-P YLM-A1 PURY-EP YLM A Service Manual Engsantiago quinterosNoch keine Bewertungen
- A Seminar Reporton System VerilogDokument29 SeitenA Seminar Reporton System Verilograkeshcusat890% (1)
- Dual JK Negative Edge-Triggered Flip-Flop SN54/74LS114A: Low Power SchottkyDokument4 SeitenDual JK Negative Edge-Triggered Flip-Flop SN54/74LS114A: Low Power Schottkydistrict19Noch keine Bewertungen
- ATV320 Getting Started EN NVE21763 01 PDFDokument4 SeitenATV320 Getting Started EN NVE21763 01 PDFmaristele rimolo JuniorNoch keine Bewertungen
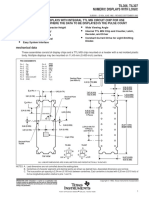
- TIL306, TIL307 Numeric Displays With LogicDokument9 SeitenTIL306, TIL307 Numeric Displays With LogicAndy ScriptorNoch keine Bewertungen
- Six-Step Troubleshooting ProcedureDokument1 SeiteSix-Step Troubleshooting ProcedureNoneya BidnessNoch keine Bewertungen
- Analog & Discrete IC Design: Dr. Ali Imran Najam 21 01 12Dokument38 SeitenAnalog & Discrete IC Design: Dr. Ali Imran Najam 21 01 12Muhammad AdnanNoch keine Bewertungen
- ABL8MEM24012: Panel Mount DIN Rail MountDokument1 SeiteABL8MEM24012: Panel Mount DIN Rail MountSebastian Alexis Muñoz PoveaNoch keine Bewertungen
- Mechanical Au 3-1Dokument10 SeitenMechanical Au 3-1Venkata Sai Kumar NunnaNoch keine Bewertungen
- ECEPurdue MOSFET Lundstrom L2.3v3bDokument22 SeitenECEPurdue MOSFET Lundstrom L2.3v3balNoch keine Bewertungen
- BS Standard-Hot Water Storage SizingDokument3 SeitenBS Standard-Hot Water Storage Sizinglijo johnNoch keine Bewertungen
- KD36XS55 Service ManualDokument211 SeitenKD36XS55 Service ManualRob MyersNoch keine Bewertungen
- Microwave ODUDokument5 SeitenMicrowave ODUImranRafiqNoch keine Bewertungen
- Datasheet Relay ENG, DS, OMI, OMIH SeriesDokument3 SeitenDatasheet Relay ENG, DS, OMI, OMIH SeriesrealaffiliateNoch keine Bewertungen
- Assignment 02Dokument10 SeitenAssignment 02Zain UL ABIDINNoch keine Bewertungen
- Filtering BasicsDokument83 SeitenFiltering BasicsDikshitJainNoch keine Bewertungen
- UPS Battery Maintenance 101 - EC&MDokument6 SeitenUPS Battery Maintenance 101 - EC&MZiad BadrNoch keine Bewertungen
- Manual Motor Starter MS132: Data SheetDokument12 SeitenManual Motor Starter MS132: Data SheetHELLOGREGNoch keine Bewertungen