Das könnte Ihnen auch gefallen
- 9TH - 2. LAWS OF MOTION, WORK AND ENERGY - PRACTICE SHEET - SOLUTIONSDokument7 Seiten9TH - 2. LAWS OF MOTION, WORK AND ENERGY - PRACTICE SHEET - SOLUTIONSAnjaneya swamyNoch keine Bewertungen
- ME3322C Thermodynamics: Entropy Balance For A Control VolumeDokument9 SeitenME3322C Thermodynamics: Entropy Balance For A Control Volumefqnguyen8Noch keine Bewertungen
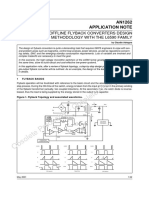
- Obsolete Product(s) - Obsolete Product(s) : Offline Flyback Converters Design Methodology With The L6590 FamilyDokument42 SeitenObsolete Product(s) - Obsolete Product(s) : Offline Flyback Converters Design Methodology With The L6590 FamilyHrishikesh KadamNoch keine Bewertungen
- 5S ImplementationDokument35 Seiten5S ImplementationPrateek Gupta100% (1)
- Switchedcapacitor 150712214807 Lva1 App6891 PDFDokument57 SeitenSwitchedcapacitor 150712214807 Lva1 App6891 PDFAyoub Le GuerrierNoch keine Bewertungen
- EX FQA715 F2 2022 V1 - NetDokument16 SeitenEX FQA715 F2 2022 V1 - NetDenis AncaNoch keine Bewertungen
- Supersonic ReviewerDokument36 SeitenSupersonic ReviewerBerns Dulam100% (1)
- ECS002 - Calculation For The Orifice Plate On The AC Lube Oil SystemDokument9 SeitenECS002 - Calculation For The Orifice Plate On The AC Lube Oil SystemPaul CarlyNoch keine Bewertungen
- Smple Cycle Thermodynamics OverviewDokument31 SeitenSmple Cycle Thermodynamics OverviewONURNoch keine Bewertungen
- E Rathakrishnan Gas Dynamics SolutionsDokument216 SeitenE Rathakrishnan Gas Dynamics SolutionsVigneshVickey67% (15)
- 211 ch3 (Part 2)Dokument39 Seiten211 ch3 (Part 2)محمد فاضلNoch keine Bewertungen
- Air - Standard - Cycles - Otto - CycleDokument27 SeitenAir - Standard - Cycles - Otto - CycleHujkasa HaiderNoch keine Bewertungen
- 30 C 100 Kpa 500 Kpa 500 Kpa 30 C: 4F-5: Performance of An Ideal Gas Cycle 10 PtsDokument5 Seiten30 C 100 Kpa 500 Kpa 500 Kpa 30 C: 4F-5: Performance of An Ideal Gas Cycle 10 PtsVyan IlhamNoch keine Bewertungen
- Copy of Consultant Worklog-22JAN2023Dokument6 SeitenCopy of Consultant Worklog-22JAN2023swathianbu38Noch keine Bewertungen
- Unit No 03Dokument41 SeitenUnit No 03sunilbabaNoch keine Bewertungen
- Ees 12 El Ici I Wi 2010 Ees 512 - Electric Circuits - Winter 2010Dokument20 SeitenEes 12 El Ici I Wi 2010 Ees 512 - Electric Circuits - Winter 2010armon_domingoNoch keine Bewertungen
- CH 11Dokument32 SeitenCH 11kere evaNoch keine Bewertungen
- Geotechnical Engineering-Ii: BSC Civil Engineering - 5 SemesterDokument6 SeitenGeotechnical Engineering-Ii: BSC Civil Engineering - 5 SemesterSaid-Mansour MohamedNoch keine Bewertungen
- Chapter 4 - Part 2Dokument9 SeitenChapter 4 - Part 2حسن كميت hassankomeit lNoch keine Bewertungen
- Chapter 4 - Part 2Dokument9 SeitenChapter 4 - Part 2حسن كميت hassankomeit lNoch keine Bewertungen
- EE394V - DG - Week3 Part2Dokument21 SeitenEE394V - DG - Week3 Part2farazhumayunNoch keine Bewertungen
- Revision of Thermodynamics: Chapter 2. EngineDokument35 SeitenRevision of Thermodynamics: Chapter 2. EngineYang Woo SeongNoch keine Bewertungen
- ECE606: Solid State Devices: Bipolar Transistors A) Introduction B) Design (I)Dokument29 SeitenECE606: Solid State Devices: Bipolar Transistors A) Introduction B) Design (I)Isaac BismonteNoch keine Bewertungen
- Designing a compressor for natural gas compressionDokument75 SeitenDesigning a compressor for natural gas compressionRizky Adi FirdausNoch keine Bewertungen
- 1b Basic concepts of turbomachines_examples (14)Dokument7 Seiten1b Basic concepts of turbomachines_examples (14)Đăng PhạmNoch keine Bewertungen
- State Space Actuator LimitationsDokument10 SeitenState Space Actuator LimitationsKevin RussellNoch keine Bewertungen
- Ultimate Bearing Capacity Xls ProgramDokument1 SeiteUltimate Bearing Capacity Xls Programaggrey noah100% (1)
- Physics EoS1 1819 V2Dokument12 SeitenPhysics EoS1 1819 V2farid oluwasegun SHITTUNoch keine Bewertungen
- Video 8 (Of 13) of Heat Transfer: Radiant Heat Transfer Coefficient For A Special Case of Graybody SurfaceDokument9 SeitenVideo 8 (Of 13) of Heat Transfer: Radiant Heat Transfer Coefficient For A Special Case of Graybody Surfaceaiman amierulNoch keine Bewertungen
- Air Standard CycleDokument54 SeitenAir Standard CycleAnnisa AriestaNoch keine Bewertungen
- Thermodynamics Lab - Determination of Jet Velocity and Nozzle EfficiencyDokument9 SeitenThermodynamics Lab - Determination of Jet Velocity and Nozzle EfficiencyfaezahjalalNoch keine Bewertungen
- Time Overcurrent Relays: More or Less Approximates Thermal FuseDokument9 SeitenTime Overcurrent Relays: More or Less Approximates Thermal FusethavaselvanNoch keine Bewertungen
- Introduction To Aircraft Performance and Static StabilityDokument36 SeitenIntroduction To Aircraft Performance and Static StabilityKaran GroverNoch keine Bewertungen
- Bài tập tự động hóa sản xuất - 0001-0001Dokument1 SeiteBài tập tự động hóa sản xuất - 0001-0001Minh NhậtNoch keine Bewertungen
- Digital-to-analog conversion process and sensor interface typesDokument7 SeitenDigital-to-analog conversion process and sensor interface typesTiến Đạt LêNoch keine Bewertungen
- Data Converters Switched-Capacitor Circuits Professor Y. Chiu EECT 7327 Spring 2011Dokument57 SeitenData Converters Switched-Capacitor Circuits Professor Y. Chiu EECT 7327 Spring 2011ilg1Noch keine Bewertungen
- Fundamentals of Physics Sixth Edition: Halliday Resnick WalkerDokument3 SeitenFundamentals of Physics Sixth Edition: Halliday Resnick WalkerAhmar KhanNoch keine Bewertungen
- Theoretical Final Exam SwissChO 2018: Equilibria ProblemsDokument21 SeitenTheoretical Final Exam SwissChO 2018: Equilibria ProblemsngocbaoNoch keine Bewertungen
- Engine Mixture Preparation CalculationsDokument51 SeitenEngine Mixture Preparation CalculationsTesfahun TegegneNoch keine Bewertungen
- TRAX - Test Report Ta DeltaDokument3 SeitenTRAX - Test Report Ta DeltaganeshNoch keine Bewertungen
- University of Southampton Research Repository Eprints SotonDokument48 SeitenUniversity of Southampton Research Repository Eprints SotonreenaNoch keine Bewertungen
- Flexpak SeriesDokument223 SeitenFlexpak SeriesBulent KABADAYINoch keine Bewertungen
- Dewalt Dcd991 Dcd996 enDokument16 SeitenDewalt Dcd991 Dcd996 enkrievkalnsgNoch keine Bewertungen
- Module 5 (Me 213)Dokument22 SeitenModule 5 (Me 213)Joshua S. LanzaderasNoch keine Bewertungen
- Pelton Turbine PracticalDokument12 SeitenPelton Turbine PracticalDewan LamaNoch keine Bewertungen
- Meie5121 Mcte4150 Sp18 HydraulicDokument22 SeitenMeie5121 Mcte4150 Sp18 HydraulichazaaNoch keine Bewertungen
- Lecture7 MOS TP AndPDokument15 SeitenLecture7 MOS TP AndPxyzabcutubeNoch keine Bewertungen
- Training on Fiat Hitachi 4 WG - 210/EST-37 Transmission PumpDokument47 SeitenTraining on Fiat Hitachi 4 WG - 210/EST-37 Transmission PumpBAIJU EVNoch keine Bewertungen
- Formula Rio FinalDokument3 SeitenFormula Rio FinalAngel Ramirez MartinezNoch keine Bewertungen
- E05 OHL-1 CT (Modified)Dokument3 SeitenE05 OHL-1 CT (Modified)arunNoch keine Bewertungen
- Assessment Protocol For Nozzle Loads On Pressure VesselsDokument5 SeitenAssessment Protocol For Nozzle Loads On Pressure VesselsBramJanssen76Noch keine Bewertungen
- Lab4 F15 Si DiodeDokument15 SeitenLab4 F15 Si DiodeJohn MarkNoch keine Bewertungen
- Prime Movers and Fluid Machines Lab: Experiment # - Section 2 - 06 April 2021Dokument13 SeitenPrime Movers and Fluid Machines Lab: Experiment # - Section 2 - 06 April 2021ArpanNoch keine Bewertungen
- MAYl 2022Dokument13 SeitenMAYl 2022Tefe TNoch keine Bewertungen
- What Is CFD?Dokument8 SeitenWhat Is CFD?Andrea AlvearNoch keine Bewertungen
- Voltage-Controlled Oscillator (VCO) Characteristics and DesignDokument80 SeitenVoltage-Controlled Oscillator (VCO) Characteristics and DesignShahab KhanNoch keine Bewertungen
- Select The Optimum Gearbox - 1 - Befq0d870vc7Dokument1 SeiteSelect The Optimum Gearbox - 1 - Befq0d870vc7Nail KayaNoch keine Bewertungen
- Automatic Peak Power Tracker Using dSPACEDokument63 SeitenAutomatic Peak Power Tracker Using dSPACEr_guna_sekarNoch keine Bewertungen
- Solution Manual for an Introduction to Equilibrium ThermodynamicsVon EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNoch keine Bewertungen
- Chapter 1: Appreciating Traffic AnalysisDokument155 SeitenChapter 1: Appreciating Traffic AnalysisAnova2Noch keine Bewertungen
- Chapter 1: Appreciating Traffic AnalysisDokument155 SeitenChapter 1: Appreciating Traffic AnalysisAnova2Noch keine Bewertungen
- Functional Testing of SAS-AREVA ArticleDokument6 SeitenFunctional Testing of SAS-AREVA ArticleTravis WoodNoch keine Bewertungen
- Beyond The Nameplate Selcting Transorer CompensationDokument23 SeitenBeyond The Nameplate Selcting Transorer CompensationAnova2Noch keine Bewertungen
- Mastering Wireshark and Network AnalysisDokument155 SeitenMastering Wireshark and Network AnalysisAnova2Noch keine Bewertungen
- Interruptor MT HVX Schneider ElectricDokument68 SeitenInterruptor MT HVX Schneider ElectricAnova2100% (2)
- This PDF File Has Been Prepared by TC 57 Experts and Is Made Available To Assist The Users of The IEC 61850-7 SeriesDokument237 SeitenThis PDF File Has Been Prepared by TC 57 Experts and Is Made Available To Assist The Users of The IEC 61850-7 SeriesGustavo AguayoNoch keine Bewertungen
- IEC 61850 For Seamlessmunication ArchitectureDokument15 SeitenIEC 61850 For Seamlessmunication ArchitectureAnova2Noch keine Bewertungen
- Making Your Chain Run For Longer: Effective Chain Maintenance Advice From Renold JeffreyDokument2 SeitenMaking Your Chain Run For Longer: Effective Chain Maintenance Advice From Renold JeffreyCương Phạm NgọcNoch keine Bewertungen
- SCT3030AL: 650V V R (Typ.) 30mDokument14 SeitenSCT3030AL: 650V V R (Typ.) 30mSas Pro EletronicaNoch keine Bewertungen
- 5L40EDokument381 Seiten5L40ERichard Andrianjaka Lucky92% (13)
- Lime Metering Tomal GB PDFDokument6 SeitenLime Metering Tomal GB PDFJose Antonio Caballero BeldaNoch keine Bewertungen
- Bondek Design & Construct ManualDokument131 SeitenBondek Design & Construct ManualAkuma.Gokai7328100% (12)
- Ansys Fluent 14.0: Workbench GuideDokument86 SeitenAnsys Fluent 14.0: Workbench GuideAoife FitzgeraldNoch keine Bewertungen
- Arahan Penggunaan Lahan Dan Perencanaan Konservasi Tanah Dan Air Di Das Yeh Empas, Tabanan, BaliDokument9 SeitenArahan Penggunaan Lahan Dan Perencanaan Konservasi Tanah Dan Air Di Das Yeh Empas, Tabanan, BalialyciaNoch keine Bewertungen
- Understanding Japanese Management PracticesDokument16 SeitenUnderstanding Japanese Management PracticesBusiness Expert Press100% (3)
- Jolywood-JW-HD144N-545-570 Bifacial 2285x1134x30Dokument2 SeitenJolywood-JW-HD144N-545-570 Bifacial 2285x1134x30Agata GuzikNoch keine Bewertungen
- Testing and Maintenance of Steam TrapsDokument8 SeitenTesting and Maintenance of Steam TrapsAjaypalsinh GohilNoch keine Bewertungen
- Vdo Pressure GuageDokument14 SeitenVdo Pressure Guagezuma zaiamNoch keine Bewertungen
- Autodesk 2010 Product Key PDFDokument6 SeitenAutodesk 2010 Product Key PDFDragon NestNoch keine Bewertungen
- Tutorial 4 - BMCG 2613 - Hydrostatic Force PDFDokument2 SeitenTutorial 4 - BMCG 2613 - Hydrostatic Force PDFmege1105Noch keine Bewertungen
- Introduction To CAL ProgrammingDokument198 SeitenIntroduction To CAL ProgrammingSalam Mohamed RiyadNoch keine Bewertungen
- University Institute of Information Technology: Ouick Learn - MCQDokument53 SeitenUniversity Institute of Information Technology: Ouick Learn - MCQvimalNoch keine Bewertungen
- Quality Criterion of Road Lighting Measurement and ExploringDokument96 SeitenQuality Criterion of Road Lighting Measurement and ExploringNitin UpadhyayNoch keine Bewertungen
- Lightning Protection SystemDokument5 SeitenLightning Protection SystemRifki FathurrahmanNoch keine Bewertungen
- Proposed Rule: Airworthiness Directives: Cirrus Design Corp. Models SR20 and SR22 AirplanesDokument2 SeitenProposed Rule: Airworthiness Directives: Cirrus Design Corp. Models SR20 and SR22 AirplanesJustia.comNoch keine Bewertungen
- Article ASI Magazine September 2014 Fumed Silica in Adhesives and Sealants FormulationsDokument4 SeitenArticle ASI Magazine September 2014 Fumed Silica in Adhesives and Sealants FormulationsdombaraNoch keine Bewertungen
- 864 Wiring Schematic: S/N 518913001-14999 S/N 516812001-14999 S/N 517512001-14999 (Printed March 2001) V-0072Dokument6 Seiten864 Wiring Schematic: S/N 518913001-14999 S/N 516812001-14999 S/N 517512001-14999 (Printed March 2001) V-0072Ataa AssaadNoch keine Bewertungen
- Plasmon CD-R ReviewDokument11 SeitenPlasmon CD-R Reviewgrudva2Noch keine Bewertungen
- Xiv 11.5.1 XcliDokument704 SeitenXiv 11.5.1 XcliMuthu LNoch keine Bewertungen
- Thomson VTH 7090 VCR ManualDokument33 SeitenThomson VTH 7090 VCR ManualTrickyDicky2Noch keine Bewertungen
- Tacloban Master Training Schedule (January-June 2012) For Web New FormatDokument5 SeitenTacloban Master Training Schedule (January-June 2012) For Web New FormatFariq AdlawanNoch keine Bewertungen
- Qa & QC Manual - DraftDokument15 SeitenQa & QC Manual - DraftNayla Shafea Azzahra100% (1)
- Presentation - Slides Holmes Lever 221215Dokument33 SeitenPresentation - Slides Holmes Lever 221215Ralitsa OlevaNoch keine Bewertungen
- PCR200Dokument4 SeitenPCR200Rudy SalimNoch keine Bewertungen
- PE Electromagnetic Pump Unit PE GB T1101 01-02-182Dokument4 SeitenPE Electromagnetic Pump Unit PE GB T1101 01-02-182li geneNoch keine Bewertungen
- Adf Interview Questions and AnsewrsDokument85 SeitenAdf Interview Questions and Ansewrsleninbabus100% (2)
- Physics Exit 3q1718 .Dokument16 SeitenPhysics Exit 3q1718 .Mikaella Tambis0% (1)