Das könnte Ihnen auch gefallen
- Example 5D DatasetDokument28 SeitenExample 5D DatasetSahand JeffNoch keine Bewertungen
- BIM Project OutlineDokument3 SeitenBIM Project OutlineSahand JeffNoch keine Bewertungen
- Cgeo 702 Technology & Contemporary Environments: Lecture 8 FisheriesDokument33 SeitenCgeo 702 Technology & Contemporary Environments: Lecture 8 FisheriesSahand JeffNoch keine Bewertungen
- Engineering Specifications For Industrial Tracks enDokument10 SeitenEngineering Specifications For Industrial Tracks enSahand JeffNoch keine Bewertungen
- 04 Industrial Track Design PDFDokument7 Seiten04 Industrial Track Design PDFSahand JeffNoch keine Bewertungen
- Morell V CserzyDokument5 SeitenMorell V CserzySahand JeffNoch keine Bewertungen
- The Big Move Baseline Monitoring Full Report EN PDFDokument39 SeitenThe Big Move Baseline Monitoring Full Report EN PDFSahand JeffNoch keine Bewertungen
- Undergraduate: Student Scholarship ProgramDokument3 SeitenUndergraduate: Student Scholarship ProgramSahand JeffNoch keine Bewertungen
- Order Form - Cpci Design Manual: Fourth EditionDokument1 SeiteOrder Form - Cpci Design Manual: Fourth EditionSahand JeffNoch keine Bewertungen
- 2016 17 Sessional DatesDokument2 Seiten2016 17 Sessional DatesSahand JeffNoch keine Bewertungen
- Assignment No. 2Dokument2 SeitenAssignment No. 2Sahand JeffNoch keine Bewertungen
- CIV1190F Course DescriptionDokument1 SeiteCIV1190F Course DescriptionSahand JeffNoch keine Bewertungen
- Moving Load Anlaysis As Per CSA-S6-10 PDFDokument26 SeitenMoving Load Anlaysis As Per CSA-S6-10 PDFSahand JeffNoch keine Bewertungen
- 2015 - Scholarship Brochure ENG Final April 24 PDFDokument3 Seiten2015 - Scholarship Brochure ENG Final April 24 PDFSahand JeffNoch keine Bewertungen
- Concrete Sealer: Tab F-Health and Safety / Material Handling ProcedureDokument1 SeiteConcrete Sealer: Tab F-Health and Safety / Material Handling ProcedureSahand JeffNoch keine Bewertungen
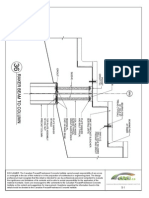
- 36 - Raker Beam To ColumnDokument1 Seite36 - Raker Beam To ColumnSahand JeffNoch keine Bewertungen
- Tekla Structural Designer Quick Start Guide For ConcreteDokument20 SeitenTekla Structural Designer Quick Start Guide For ConcreteAnonymous ptLRLiNNNoch keine Bewertungen
- 03 - Worksheet - Projectile ProblemsDokument2 Seiten03 - Worksheet - Projectile ProblemsSahand Jeff100% (1)
- TTC Map CentralDokument1 SeiteTTC Map CentralSahand JeffNoch keine Bewertungen
- CordobaDokument2 SeitenCordobaSahand JeffNoch keine Bewertungen
- 3ds Max TutorialDokument34 Seiten3ds Max TutorialSahand JeffNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- High Speed in WorldDokument6 SeitenHigh Speed in Worldmehmet nedimNoch keine Bewertungen
- WHAT PRICE SPEED - REVISITED - TextonlyDokument6 SeitenWHAT PRICE SPEED - REVISITED - TextonlyVassilis AgapitosNoch keine Bewertungen
- Chapter Iv - Transportation SectorDokument12 SeitenChapter Iv - Transportation SectorBridget DominguezNoch keine Bewertungen
- India's HSR Journey Digital BookDokument70 SeitenIndia's HSR Journey Digital BookGaurav SrivastavaNoch keine Bewertungen
- Rail TurkeyDokument63 SeitenRail TurkeyAzman HamzahNoch keine Bewertungen
- Ahmedabad Rajkot Semi High Speed Rail CorridorDokument9 SeitenAhmedabad Rajkot Semi High Speed Rail CorridorShalabh GuptaNoch keine Bewertungen
- High-Speed Railways in China, A Look at Construction CostsDokument8 SeitenHigh-Speed Railways in China, A Look at Construction CoststeerasakNoch keine Bewertungen
- Rail TerminologyDokument6 SeitenRail Terminologyaleksandra_delo6374Noch keine Bewertungen
- BBC Learning English - 6 Minute English - Transport of The FutureDokument39 SeitenBBC Learning English - 6 Minute English - Transport of The FutureMohamad GhafooryNoch keine Bewertungen
- Analysis of High Speed Rail S PotentialDokument20 SeitenAnalysis of High Speed Rail S PotentialDe'Von JNoch keine Bewertungen
- Maglev PDFDokument56 SeitenMaglev PDFOğulcan AtılkanNoch keine Bewertungen
- Stopping The Runaway Train: The Case For Privatizing Amtrak, Cato Policy Analysis No. 712Dokument24 SeitenStopping The Runaway Train: The Case For Privatizing Amtrak, Cato Policy Analysis No. 712Cato InstituteNoch keine Bewertungen
- Simply Supported Composite Railway Bridge: A Comparison of Ballasted and Ballastless Track AlternativesDokument175 SeitenSimply Supported Composite Railway Bridge: A Comparison of Ballasted and Ballastless Track AlternativesdeathesNoch keine Bewertungen
- Passenger Rail & Transit Rail Manufacturing in The U.SDokument44 SeitenPassenger Rail & Transit Rail Manufacturing in The U.SCDI Global India100% (1)
- Lecture21 Passenger Flow Forecasting NetworkDokument31 SeitenLecture21 Passenger Flow Forecasting NetworkDoukariNoch keine Bewertungen
- PagesDokument97 SeitenPagesEminaŠarkinovićNoch keine Bewertungen
- The Design of Bullet Train Process Bogie and The Finite Element Analysis of Frame StrengthDokument6 SeitenThe Design of Bullet Train Process Bogie and The Finite Element Analysis of Frame StrengthMariano SerranoNoch keine Bewertungen
- Highspeed TrainDokument22 SeitenHighspeed TrainAbhimanyu Singh Bhati100% (1)
- Tokyo JRDokument1 SeiteTokyo JRsheilaabad8766Noch keine Bewertungen
- IryoDokument2 SeitenIryoEnescu MarianNoch keine Bewertungen
- Java High Speed Train ProjectDokument26 SeitenJava High Speed Train Projectkekipi100% (3)
- This Book Can Save The Earth Robert Ionescu PDFDokument114 SeitenThis Book Can Save The Earth Robert Ionescu PDFswiss swissNoch keine Bewertungen
- Technical Memorandum: California High-Speed Train ProjectDokument60 SeitenTechnical Memorandum: California High-Speed Train ProjectTran DNNoch keine Bewertungen
- How Trains Could Replace Planes in EuropeDokument3 SeitenHow Trains Could Replace Planes in EuropeAntonio MonerrisNoch keine Bewertungen
- Nose Cone Design 1 PDFDokument147 SeitenNose Cone Design 1 PDFgssrrajuNoch keine Bewertungen
- Rail Transportation and Pipelines - The Geography of Transport SystemsDokument22 SeitenRail Transportation and Pipelines - The Geography of Transport SystemsTiziana LylieNoch keine Bewertungen
- Assignment RailwayDokument6 SeitenAssignment RailwayAhmed MastanNoch keine Bewertungen
- High Speed Rail in Australia - FINAL - REPORTDokument66 SeitenHigh Speed Rail in Australia - FINAL - REPORTgerfreecallsNoch keine Bewertungen
- Livre Alstom DDR 2017-18 Va CLDokument312 SeitenLivre Alstom DDR 2017-18 Va CLAndreiMaresNoch keine Bewertungen
- Future European-Wide Harmonised Train Drivers CabDokument11 SeitenFuture European-Wide Harmonised Train Drivers Cabmutiara kurniaNoch keine Bewertungen