Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Triumph Daytona 675 RacepartsDokument29 SeitenTriumph Daytona 675 RacepartsThunderbird3Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- SAG Automotive Servicing NC IIIDokument8 SeitenSAG Automotive Servicing NC IIIJefford Vinson ValdehuezaNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- VAIL 20 - PP: Pressure Relief ValvesDokument2 SeitenVAIL 20 - PP: Pressure Relief ValvesSachin RamadasanNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Bearings NomenclaturesDokument76 SeitenBearings NomenclaturesgksamyNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- 2014 Aprilia SRV-850 (Service Manual)Dokument366 Seiten2014 Aprilia SRV-850 (Service Manual)alexander ortizNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Cone - Crushers PARKERDokument4 SeitenCone - Crushers PARKERdjenan50% (2)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Starting Analysis of Induction Motor by EtapDokument6 SeitenStarting Analysis of Induction Motor by Etapgusgif50% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Pedal Operated ForkliftDokument56 SeitenPedal Operated Forkliftfahamith ahamed100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Unit TestDokument6 SeitenUnit Testapi-312110713Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- DW670Dokument1 SeiteDW670Joel ArvendoNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- JCB 515-40 Loadall (US) Mar 2011Dokument8 SeitenJCB 515-40 Loadall (US) Mar 2011JCB North AmericaNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Ravenol Racing 4-t Motobike Sae 10w-40Dokument2 SeitenRavenol Racing 4-t Motobike Sae 10w-40Cao Đức TrungNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
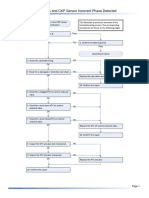
- DTC P0341: CMP Sensor A and CKP Sensor Incorrect Phase DetectedDokument4 SeitenDTC P0341: CMP Sensor A and CKP Sensor Incorrect Phase Detectedmzcz3866Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- D4B802ED21F-Generic Scan ToolDokument400 SeitenD4B802ED21F-Generic Scan ToolNuno CristaoNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- SL3000 - 113-General SpecificationDokument37 SeitenSL3000 - 113-General SpecificationRadu IonutNoch keine Bewertungen
- Ammco 7000 - PL - 940941 - 00Dokument10 SeitenAmmco 7000 - PL - 940941 - 00jmartinezmoNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- UntitledDokument163 SeitenUntitledXSHAFT MOTOGARAGENoch keine Bewertungen
- 793F Procedimiento Instalacion Arnes TransmisionDokument33 Seiten793F Procedimiento Instalacion Arnes TransmisionJose 'Larry' Tapia M.Noch keine Bewertungen
- Hoja de Vida Maquina Piloteadora Sany 330Dokument3 SeitenHoja de Vida Maquina Piloteadora Sany 330Tefi OrtizNoch keine Bewertungen
- C Force 520 Service Manual V1Dokument294 SeitenC Force 520 Service Manual V1ApKNoch keine Bewertungen
- 07 Gas HandlingDokument88 Seiten07 Gas HandlingMohamed Selim100% (3)
- Previous Screen: Wheel Loader 988H Wheel Loader Bxy 988H Wheel Loader BXY00001-UP (MACHINE) POWERED BY C18 EngineDokument3 SeitenPrevious Screen: Wheel Loader 988H Wheel Loader Bxy 988H Wheel Loader BXY00001-UP (MACHINE) POWERED BY C18 EngineJuan ValdiviesoNoch keine Bewertungen
- Instruction Manual and Parts List: Integrated Energy Saving Lockstitch Sewing Machine Direct Drive MotorDokument50 SeitenInstruction Manual and Parts List: Integrated Energy Saving Lockstitch Sewing Machine Direct Drive MotorKeerthi VasanNoch keine Bewertungen
- Catalog PDFDokument24 SeitenCatalog PDFSandraMendivizNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- 88) Leroy Somer AlternatorDokument24 Seiten88) Leroy Somer AlternatorAztvNoch keine Bewertungen
- Automobilska TerminologijaDokument34 SeitenAutomobilska Terminologijamrr32Noch keine Bewertungen
- Referral Guide20 Jan 13Dokument16 SeitenReferral Guide20 Jan 13Rambabu NagallaNoch keine Bewertungen
- HTP-ER-OM-B-1 Maintenance Regulation For Diesel Engine System PDFDokument538 SeitenHTP-ER-OM-B-1 Maintenance Regulation For Diesel Engine System PDFJorge Luis Vera AlmeidaNoch keine Bewertungen
- UL1057114 - T12253 - Armada Tuah 85 - TT1650 DPN CP - DMN300007719 - D - W...Dokument4 SeitenUL1057114 - T12253 - Armada Tuah 85 - TT1650 DPN CP - DMN300007719 - D - W...Claudio SantellanesNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- EC Nissan GTRDokument640 SeitenEC Nissan GTRJsarl Jsrl100% (1)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)