Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- How Chargers WorkDokument21 SeitenHow Chargers WorkMuhammad Irfan RiazNoch keine Bewertungen
- Ultracold Atoms SlidesDokument49 SeitenUltracold Atoms SlideslaubbaumNoch keine Bewertungen
- Shri Naina Devi Aarti English 167Dokument5 SeitenShri Naina Devi Aarti English 167ratt182Noch keine Bewertungen
- CG Photo Editing2Dokument3 SeitenCG Photo Editing2Mylene55% (11)
- Job Satisfaction VariableDokument2 SeitenJob Satisfaction VariableAnagha Pawar - 34Noch keine Bewertungen
- MH5-C Prospekt PDFDokument16 SeitenMH5-C Prospekt PDFvatasaNoch keine Bewertungen
- Maths Formulas For IGCSEDokument2 SeitenMaths Formulas For IGCSEHikma100% (1)
- Test 2-Module 1 12-10-2017: VocabularyDokument2 SeitenTest 2-Module 1 12-10-2017: VocabularySzabolcs Kelemen100% (1)
- ..Product CatalogueDokument56 Seiten..Product Catalogue950 911Noch keine Bewertungen
- Lab 3 Arduino Led Candle Light: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroDokument3 SeitenLab 3 Arduino Led Candle Light: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroGladys Ruth PaypaNoch keine Bewertungen
- LP32HS User Manual v1Dokument52 SeitenLP32HS User Manual v1tonizx7rrNoch keine Bewertungen
- GPP Calendar of Activities 2022 23 SdoDokument5 SeitenGPP Calendar of Activities 2022 23 SdoRomel GarciaNoch keine Bewertungen
- 3D Printing & Embedded ElectronicsDokument7 Seiten3D Printing & Embedded ElectronicsSantiago PatitucciNoch keine Bewertungen
- Dialectical Relationship Between Translation Theory and PracticeDokument5 SeitenDialectical Relationship Between Translation Theory and PracticeEverything Under the sunNoch keine Bewertungen
- Origin ManualDokument186 SeitenOrigin ManualmariaNoch keine Bewertungen
- Based On PSA 700 Revised - The Independent Auditor's Report On A Complete Set of General Purpose Financial StatementsDokument12 SeitenBased On PSA 700 Revised - The Independent Auditor's Report On A Complete Set of General Purpose Financial Statementsbobo kaNoch keine Bewertungen
- Create A Visual DopplerDokument1 SeiteCreate A Visual DopplerRahul GandhiNoch keine Bewertungen
- CII Sohrabji Godrej GreenDokument30 SeitenCII Sohrabji Godrej GreenRITHANYAA100% (2)
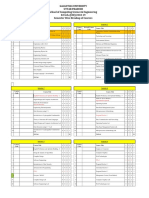
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDokument2 SeitenGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiNoch keine Bewertungen
- Mission and VisionDokument5 SeitenMission and VisionsanjedNoch keine Bewertungen
- Vitamins - CyanocobalaminDokument12 SeitenVitamins - CyanocobalaminK PrashasthaNoch keine Bewertungen
- Tuma Research ManualDokument57 SeitenTuma Research ManualKashinde Learner Centered Mandari100% (1)
- Borges, The SouthDokument4 SeitenBorges, The Southdanielg233100% (1)
- Project Quality Plan (JFJS-788)Dokument18 SeitenProject Quality Plan (JFJS-788)mominNoch keine Bewertungen
- AMICO Bar Grating CatalogDokument57 SeitenAMICO Bar Grating CatalogAdnanNoch keine Bewertungen
- KDE11SSDokument2 SeitenKDE11SSluisgomezpasion1Noch keine Bewertungen
- Conducting Focus GroupsDokument4 SeitenConducting Focus GroupsOxfam100% (1)
- Philodendron Plants CareDokument4 SeitenPhilodendron Plants CareSabre FortNoch keine Bewertungen
- Claim of FactDokument11 SeitenClaim of FactXeb UlritzNoch keine Bewertungen
- Word CountDokument3 SeitenWord CountLeo LonardelliNoch keine Bewertungen