Das könnte Ihnen auch gefallen
- Ajuste de Curvas e InterpolaciónDokument8 SeitenAjuste de Curvas e InterpolaciónFranciscoFrankyGomezAyalaNoch keine Bewertungen
- Interpolación y regresión de curvasDokument36 SeitenInterpolación y regresión de curvasUlisesBenitezMedinaNoch keine Bewertungen
- Ajuste de Curvas e InterpolaciónDokument5 SeitenAjuste de Curvas e InterpolaciónJuankiOrzuNoch keine Bewertungen
- PACRDokument5 SeitenPACRPedro Antonio cofre RojasNoch keine Bewertungen
- Ajuste Por Interpolaridad SegmentariaDokument11 SeitenAjuste Por Interpolaridad SegmentariaDianna AlfaroNoch keine Bewertungen
- Metodos Unidad 4Dokument16 SeitenMetodos Unidad 4John HRNoch keine Bewertungen
- ApuntesDokument19 SeitenApuntes92slvromNoch keine Bewertungen
- Tema 4 - Ajuste de Funciones - Metodos NumericosDokument11 SeitenTema 4 - Ajuste de Funciones - Metodos NumericosMelaniNoch keine Bewertungen
- Ajuste de Curvas E InterpolaciónDokument17 SeitenAjuste de Curvas E Interpolaciónjose alberto rojano peguerosNoch keine Bewertungen
- Actividad 1U3Dokument18 SeitenActividad 1U3Sergio Jose Vazquez HerreraNoch keine Bewertungen
- Interpolación polinómicaDokument28 SeitenInterpolación polinómicaGerwin AlcalaNoch keine Bewertungen
- Analisis Numerico Unidad 4Dokument21 SeitenAnalisis Numerico Unidad 4luis antonioNoch keine Bewertungen
- Interpolación numéricaDokument20 SeitenInterpolación numéricaAnonymous MuJwZt7D1iNoch keine Bewertungen
- Ajustes de Curvas e InterpolacionDokument15 SeitenAjustes de Curvas e InterpolacionAlberto DavidNoch keine Bewertungen
- InterpolaciónDokument29 SeitenInterpolaciónGerwin AlcalaNoch keine Bewertungen
- New 04 Conde, J. (2018) Ajuste de FuncionesDokument9 SeitenNew 04 Conde, J. (2018) Ajuste de FuncionesViri YseyNoch keine Bewertungen
- Análisis numérico: introducción a la regresión por mínimos cuadradosDokument14 SeitenAnálisis numérico: introducción a la regresión por mínimos cuadradosJuan Carlos Rufasto CastroNoch keine Bewertungen
- Interpol Ac I OnDokument9 SeitenInterpol Ac I OnJudimel Muñoz GuayambalNoch keine Bewertungen
- Interpolación y Ajuste de CurvasDokument11 SeitenInterpolación y Ajuste de Curvasjurguen jacomeNoch keine Bewertungen
- Interpol Ac I OnDokument8 SeitenInterpol Ac I OnEdwin Ramiro Torrico VargasNoch keine Bewertungen
- ALUMNO9Dokument10 SeitenALUMNO9Francisco Gomez GuerreroNoch keine Bewertungen
- U4-Interpolacion Lineal y CuadráticaDokument4 SeitenU4-Interpolacion Lineal y Cuadráticadavid_valdez_83Noch keine Bewertungen
- PortadaDokument7 SeitenPortadaCindy ValerianoNoch keine Bewertungen
- Metodos de Interpolacion y Ajuste de DatDokument39 SeitenMetodos de Interpolacion y Ajuste de DatRony Berly Huayta QuispeNoch keine Bewertungen
- Apuntes 4 Interpolacion Metodos NumericosDokument27 SeitenApuntes 4 Interpolacion Metodos Numericosnarvaezalviz1042Noch keine Bewertungen
- Metodos NumericosDokument6 SeitenMetodos NumericosGerardo MartinezNoch keine Bewertungen
- Interpolación y ajuste de funciones mediante polinomios de Newton, Lagrange y splinesDokument8 SeitenInterpolación y ajuste de funciones mediante polinomios de Newton, Lagrange y splinesRosendo100% (1)
- Interpolación y regresión polinómicaDokument13 SeitenInterpolación y regresión polinómicaJuan Pablo TorresNoch keine Bewertungen
- Interpolación y Ajuste de FuncionesDokument17 SeitenInterpolación y Ajuste de FuncionesJose AlvarezNoch keine Bewertungen
- LagrangeDokument5 SeitenLagrangeSarc AsserNoch keine Bewertungen
- Unidad 5Dokument16 SeitenUnidad 5Marcos MartinezNoch keine Bewertungen
- Ajustes de CurvasDokument14 SeitenAjustes de CurvasMarthaGuijarroAltamiranoNoch keine Bewertungen
- Clases Cn-Primera ParteDokument9 SeitenClases Cn-Primera ParteAngie Nohelia Pilligua BasurtoNoch keine Bewertungen
- Interpolacion de NewtonDokument17 SeitenInterpolacion de NewtonDaibeth SomarribaNoch keine Bewertungen
- Investigacion Documental Act.1U5Dokument13 SeitenInvestigacion Documental Act.1U5Jonathan PerezNoch keine Bewertungen
- Trabajo de Metodos Numericos 2Dokument13 SeitenTrabajo de Metodos Numericos 2Bruno AlejandroNoch keine Bewertungen
- Investigación de InterpolaciónDokument17 SeitenInvestigación de InterpolaciónGuillermo Jesus Lopez SantosNoch keine Bewertungen
- 33 48 Metodo NumDokument6 Seiten33 48 Metodo NumRodrigoBustosCruzNoch keine Bewertungen
- Proyecto MetodosDokument25 SeitenProyecto MetodosMARRRNoch keine Bewertungen
- Regresión lineal cuadrática y Métodos numéricosDokument4 SeitenRegresión lineal cuadrática y Métodos numéricosvladimirNoch keine Bewertungen
- Polinomio de Interpolación de NewtonDokument9 SeitenPolinomio de Interpolación de NewtonJuan Carlos Lluncor AcaroNoch keine Bewertungen
- Ajuste de FuncionesDokument6 SeitenAjuste de FuncionesAlejandro Abril100% (1)
- Metodos Numerico-Investigacion Unidad-5Dokument11 SeitenMetodos Numerico-Investigacion Unidad-5Abraham Antonio Lagunes BenitezNoch keine Bewertungen
- Regresión Lineal Múltiple 1Dokument5 SeitenRegresión Lineal Múltiple 1JOSEPH ANDRE RIVADENEYRA COZNoch keine Bewertungen
- Trabajo InterpolacionDokument3 SeitenTrabajo InterpolacionJose MasyrubiNoch keine Bewertungen
- Unidad 2 Analisis NumericoDokument14 SeitenUnidad 2 Analisis Numericoemmy_flores_1Noch keine Bewertungen
- Teoría de La InterpolaciónDokument10 SeitenTeoría de La InterpolaciónDayanna95Noch keine Bewertungen
- Interpolacion de Lagrange CoregidoDokument12 SeitenInterpolacion de Lagrange CoregidoEfrain CastilloNoch keine Bewertungen
- InterpolaciónDokument8 SeitenInterpolacióncukisincNoch keine Bewertungen
- Metodo de Interpolacion de LDokument5 SeitenMetodo de Interpolacion de LScarlettNoch keine Bewertungen
- InterpolaciónDokument17 SeitenInterpolacióncarlosleonteamobebe100% (1)
- Tarea 2 - Vargas Dominguez Roberto AlejandroDokument5 SeitenTarea 2 - Vargas Dominguez Roberto AlejandroRoberto VargasNoch keine Bewertungen
- Informe de Interpolacion LDokument6 SeitenInforme de Interpolacion LLouis AngelNoch keine Bewertungen
- Unidad VDokument9 SeitenUnidad VOssiel Canul MisNoch keine Bewertungen
- Polinomio de Interpolación de Newton - FisicaDokument20 SeitenPolinomio de Interpolación de Newton - FisicaFANNY CECILIA RAMIREZ MARTINEZNoch keine Bewertungen
- Aproximación Funcional e InterpolaciónDokument40 SeitenAproximación Funcional e InterpolaciónCarlos Alberto Garzon PajoyNoch keine Bewertungen
- Métodos numéricos: interpolaciónDokument15 SeitenMétodos numéricos: interpolaciónJose SuarezNoch keine Bewertungen
- Calculo Numerico 1Dokument63 SeitenCalculo Numerico 1Rafael EllesNoch keine Bewertungen
- Diapositivas de Metodos NumericosDokument60 SeitenDiapositivas de Metodos NumericosYunelkis MarcanoNoch keine Bewertungen
- Planeación DidácticaDokument12 SeitenPlaneación DidácticaDanny MurciaNoch keine Bewertungen
- Procedimientos Didácticos para La Solución de Problemas en La Enseñanza-Aprendizaje de La Biología - QuímicaDokument12 SeitenProcedimientos Didácticos para La Solución de Problemas en La Enseñanza-Aprendizaje de La Biología - QuímicaDanny MurciaNoch keine Bewertungen
- Método Chapman y Mezclas Baja P PDFDokument5 SeitenMétodo Chapman y Mezclas Baja P PDFDanny MurciaNoch keine Bewertungen
- Filosofía TaguchiDokument5 SeitenFilosofía TaguchiDanny MurciaNoch keine Bewertungen
- Capitulo XIXDokument2 SeitenCapitulo XIXDanny MurciaNoch keine Bewertungen
- 2 Guia - Observacion PDFDokument1 Seite2 Guia - Observacion PDFDanny MurciaNoch keine Bewertungen
- Practica 2 Procesador de Texto. TICDokument5 SeitenPractica 2 Procesador de Texto. TICDanny MurciaNoch keine Bewertungen
- Columna de AdsorciónDokument4 SeitenColumna de AdsorciónDanny MurciaNoch keine Bewertungen
- Casos UNIDAD 2Dokument2 SeitenCasos UNIDAD 2Danny MurciaNoch keine Bewertungen
- Tarea de TIC 2Dokument1 SeiteTarea de TIC 2Danny MurciaNoch keine Bewertungen
- ING de CalidadDokument8 SeitenING de CalidadDanny MurciaNoch keine Bewertungen
- Cetis 15Dokument1 SeiteCetis 15Danny MurciaNoch keine Bewertungen
- Ficha de Pago: InstruccionesDokument1 SeiteFicha de Pago: InstruccionesDanny MurciaNoch keine Bewertungen
- 2 Guia - Observacion PDFDokument1 Seite2 Guia - Observacion PDFDanny MurciaNoch keine Bewertungen
- Ficha de Pago: InstruccionesDokument1 SeiteFicha de Pago: InstruccionesDanny MurciaNoch keine Bewertungen
- 3 Lista - Cotejo PDFDokument1 Seite3 Lista - Cotejo PDFDanny MurciaNoch keine Bewertungen
- 4 Rubrica - Apuntes PDFDokument1 Seite4 Rubrica - Apuntes PDFDanny MurciaNoch keine Bewertungen
- 4 Rubrica - Apuntes PDFDokument1 Seite4 Rubrica - Apuntes PDFDanny MurciaNoch keine Bewertungen
- 3 Lista - Cotejo PDFDokument1 Seite3 Lista - Cotejo PDFDanny MurciaNoch keine Bewertungen
- Química 3B - Actividades metales no metales enlace átomos tabla periódicaDokument2 SeitenQuímica 3B - Actividades metales no metales enlace átomos tabla periódicaDanny MurciaNoch keine Bewertungen
- Gestión de La Calidad PDFDokument9 SeitenGestión de La Calidad PDFedgar yadhir perez hernandezNoch keine Bewertungen
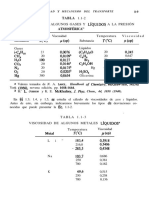
- Viscosidad de gases y líquidos: una tabla comparativaDokument1 SeiteViscosidad de gases y líquidos: una tabla comparativaDanny MurciaNoch keine Bewertungen
- 1.1 Epistemologia-De-CalidadDokument5 Seiten1.1 Epistemologia-De-CalidadDanny MurciaNoch keine Bewertungen
- Ejercicios Primera Ley de La Termodinamica Sistemas AbiertosDokument1 SeiteEjercicios Primera Ley de La Termodinamica Sistemas AbiertosOscar Rodea Olivares100% (1)
- Metodo Estados CorrespondientesDokument1 SeiteMetodo Estados CorrespondientesDanny MurciaNoch keine Bewertungen
- Filosofía TaguchiDokument5 SeitenFilosofía TaguchiDanny MurciaNoch keine Bewertungen
- Ejercicio 2 PautaDokument5 SeitenEjercicio 2 PautaJavierIgnacioDelgadoÁlvarezNoch keine Bewertungen
- Cedula GARA980327HMCRYL03Dokument2 SeitenCedula GARA980327HMCRYL03Miguel AngelNoch keine Bewertungen
- COMITE PRO-ARBOL TeccDokument1 SeiteCOMITE PRO-ARBOL TeccDanny MurciaNoch keine Bewertungen
- Comite Pro-ArbolDokument1 SeiteComite Pro-ArbolDanny MurciaNoch keine Bewertungen
- Oraciones para Fundirse en La Divina VoluntadDokument11 SeitenOraciones para Fundirse en La Divina VoluntadClaudia Patricia BoteroNoch keine Bewertungen
- Laboratorio #4 Hidraulica IIDokument5 SeitenLaboratorio #4 Hidraulica IIMilton Gross GomezNoch keine Bewertungen
- ActividadDokument5 SeitenActividadFreddyNoch keine Bewertungen
- Medicina Alternativa Origen de La Medicina Naturista y Su Papel en El Mundo ContemporáneoDokument3 SeitenMedicina Alternativa Origen de La Medicina Naturista y Su Papel en El Mundo ContemporáneoIjo_Barapetu100% (1)
- Preguntas H1Dokument92 SeitenPreguntas H1Alejandro MarínNoch keine Bewertungen
- Control de La Información Documentada v.0Dokument7 SeitenControl de La Información Documentada v.0joseNoch keine Bewertungen
- 01 - GeN2 Comfort TecnicoDokument24 Seiten01 - GeN2 Comfort Tecnicoamma18275651Noch keine Bewertungen
- Tarea No.1 Metodologia y Analisis de CasosDokument8 SeitenTarea No.1 Metodologia y Analisis de CasosMaileny Carolina Santos GarridoNoch keine Bewertungen
- Cartilla Tecnica ExcavacionesDokument2 SeitenCartilla Tecnica ExcavacionesVane OliveraNoch keine Bewertungen
- Tema 16 Los Viajes Del AprendizDokument2 SeitenTema 16 Los Viajes Del AprendizAlberto Salmeron LizaldiNoch keine Bewertungen
- Exclusion de HerederoDokument9 SeitenExclusion de HerederoHugo AlegreNoch keine Bewertungen
- Cultivo de PlatanoDokument27 SeitenCultivo de PlatanoGustavo Adolfo AlvaradoNoch keine Bewertungen
- Formación de Cristales de Azúcar en El Proceso de Licores EscarchadosDokument2 SeitenFormación de Cristales de Azúcar en El Proceso de Licores EscarchadosMartin TowersNoch keine Bewertungen
- Causales de Improcedencia de Habeas CorpusDokument16 SeitenCausales de Improcedencia de Habeas CorpusCHARBELIN FAVIOLA BAÑICO GARCIA100% (1)
- Revista de Sociologia Contemporanea V7 N23 3Dokument10 SeitenRevista de Sociologia Contemporanea V7 N23 3lorena condeNoch keine Bewertungen
- Conta de Gerencia Preguntas LaboratorioDokument3 SeitenConta de Gerencia Preguntas LaboratorioPaul Dalhy ZapataNoch keine Bewertungen
- Guía No Man's SkyDokument52 SeitenGuía No Man's SkyEnrique TruAr100% (4)
- Leyes de MaxwellDokument5 SeitenLeyes de MaxwellDaniel ManriqueNoch keine Bewertungen
- El Entorno en El Que Operan Los Proyectos U1Dokument20 SeitenEl Entorno en El Que Operan Los Proyectos U1karelisNoch keine Bewertungen
- Libro de OroDokument292 SeitenLibro de OroRichard GutierrezNoch keine Bewertungen
- Hist San Rafael del Yuma fund 1889Dokument1 SeiteHist San Rafael del Yuma fund 1889Michael Perez ReyesNoch keine Bewertungen
- Recursos PTU Lenguaje, PowerDokument38 SeitenRecursos PTU Lenguaje, PowerMAURICIO CASTILLONoch keine Bewertungen
- Devocional 5 JobDokument6 SeitenDevocional 5 JobElizzabethNoch keine Bewertungen
- Fantasma L.J SmithDokument354 SeitenFantasma L.J SmithLina Isabel Lopez Ahumada100% (3)
- Unidad III La FacturaDokument10 SeitenUnidad III La FacturaAaron MartinezNoch keine Bewertungen
- Cálculo-Índice Grupo AASHTODokument3 SeitenCálculo-Índice Grupo AASHTOJosue Ezequiel Mejia CarlosNoch keine Bewertungen
- Evaluacion de Negocio - Manzana Verde 1Dokument9 SeitenEvaluacion de Negocio - Manzana Verde 1JHIMMYNoch keine Bewertungen
- Semiologia Cardiovascular - Angina.dolor TorácicoDokument33 SeitenSemiologia Cardiovascular - Angina.dolor TorácicoReviereNoch keine Bewertungen
- La Ensenanza de CulturaDokument4 SeitenLa Ensenanza de CulturaDanilú Oropeza VázquezNoch keine Bewertungen
- Informe de Conductividad Eléctrica Del Suelo - Paye Zeballos, FresiaDokument20 SeitenInforme de Conductividad Eléctrica Del Suelo - Paye Zeballos, Fresiamelany50% (2)