Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 2007-Comparison of 3D-SVPWM and Carrier-Based PWM of Three-PhaseDokument9 Seiten2007-Comparison of 3D-SVPWM and Carrier-Based PWM of Three-PhaseTài Nguyễn Minh NhậtNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- 2004 A Carrier-Based PWM Method For Three-Phase Four-LegDokument10 Seiten2004 A Carrier-Based PWM Method For Three-Phase Four-LegTài Nguyễn Minh NhậtNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- 1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterDokument8 Seiten1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterTài Nguyễn Minh NhậtNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- 2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFDokument7 Seiten2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFTài Nguyễn Minh NhậtNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Cat4 Test Practice For Year 11 Level GDokument6 SeitenCat4 Test Practice For Year 11 Level GJoel OkohNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Module 3 - Lesson 3.1Dokument2 SeitenModule 3 - Lesson 3.1Cj RomoNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- My ResumeDokument2 SeitenMy ResumeWan NaqimNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Foxit PhantomPDF For HP - Quick GuideDokument32 SeitenFoxit PhantomPDF For HP - Quick GuidekhilmiNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- MAT2355 Final 2002Dokument8 SeitenMAT2355 Final 2002bojie_97965Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Chpater 2 PDFDokument44 SeitenChpater 2 PDFBilalNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Butterfly Valve Info PDFDokument14 SeitenButterfly Valve Info PDFCS100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- ACCA Advanced Corporate Reporting 2005Dokument763 SeitenACCA Advanced Corporate Reporting 2005Platonic100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Final Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eDokument15 SeitenFinal Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eAytida Ohorgun100% (5)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- #6 Decision Control InstructionDokument9 Seiten#6 Decision Control InstructionTimothy King LincolnNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Thomas E. Skidmore-The Politics of Military Rule in Brazil, 1964-1985-Oxford University Press, USA (1988) PDFDokument433 SeitenThomas E. Skidmore-The Politics of Military Rule in Brazil, 1964-1985-Oxford University Press, USA (1988) PDFMarcelo Ramos100% (2)
- Is 13779 1999 PDFDokument46 SeitenIs 13779 1999 PDFchandranmuthuswamyNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Biology - Solved ExamDokument27 SeitenBiology - Solved ExamlyliasahiliNoch keine Bewertungen
- A Photograph (Q and Poetic Devices)Dokument2 SeitenA Photograph (Q and Poetic Devices)Sanya SadanaNoch keine Bewertungen
- Windows SCADA Disturbance Capture: User's GuideDokument23 SeitenWindows SCADA Disturbance Capture: User's GuideANDREA LILIANA BAUTISTA ACEVEDONoch keine Bewertungen
- Trudy Scott Amino-AcidsDokument35 SeitenTrudy Scott Amino-AcidsPreeti100% (5)
- Ideal Weight ChartDokument4 SeitenIdeal Weight ChartMarvin Osmar Estrada JuarezNoch keine Bewertungen
- Chapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and MoralityDokument7 SeitenChapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and Moralitynat gatNoch keine Bewertungen
- Paediatrica Indonesiana: Sumadiono, Cahya Dewi Satria, Nurul Mardhiah, Grace Iva SusantiDokument6 SeitenPaediatrica Indonesiana: Sumadiono, Cahya Dewi Satria, Nurul Mardhiah, Grace Iva SusantiharnizaNoch keine Bewertungen
- 206f8JD-Tech MahindraDokument9 Seiten206f8JD-Tech MahindraHarshit AggarwalNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Zero Power Factor Method or Potier MethodDokument1 SeiteZero Power Factor Method or Potier MethodMarkAlumbroTrangiaNoch keine Bewertungen
- SATURDAY - FIRST - PDF (1)Dokument3 SeitenSATURDAY - FIRST - PDF (1)Manuel Perez GastelumNoch keine Bewertungen
- Mathematics: Quarter 3 - Module 6Dokument15 SeitenMathematics: Quarter 3 - Module 6Ray Phillip G. Jorduela0% (1)
- AIM Mag Issue 22 April 2010Dokument98 SeitenAIM Mag Issue 22 April 2010Artisans in Miniature95% (19)
- Alexander Blok - 'The King in The Square', Slavonic and East European Review, 12 (36), 1934Dokument25 SeitenAlexander Blok - 'The King in The Square', Slavonic and East European Review, 12 (36), 1934scott brodieNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Ghalib TimelineDokument2 SeitenGhalib Timelinemaryam-69Noch keine Bewertungen
- Robot MecanumDokument4 SeitenRobot MecanumalienkanibalNoch keine Bewertungen
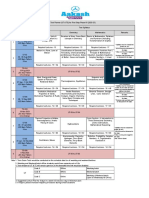
- UT & TE Planner - AY 2023-24 - Phase-01Dokument1 SeiteUT & TE Planner - AY 2023-24 - Phase-01Atharv KumarNoch keine Bewertungen
- Barangay Sindalan v. CA G.R. No. 150640, March 22, 2007Dokument17 SeitenBarangay Sindalan v. CA G.R. No. 150640, March 22, 2007FD BalitaNoch keine Bewertungen
- Clinincal Decision Support SystemDokument10 SeitenClinincal Decision Support Systemم. سهير عبد داؤد عسىNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)