Das könnte Ihnen auch gefallen
- Chapter 3 Fourier Series1Dokument40 SeitenChapter 3 Fourier Series1EyobNoch keine Bewertungen
- 6 Fourier SeriesDokument43 Seiten6 Fourier SeriesutpNoch keine Bewertungen
- ch1 PPTDokument74 Seitench1 PPTEFRA BININoch keine Bewertungen
- InterpolationDokument51 SeitenInterpolationMuddys007Noch keine Bewertungen
- Answer On Question #74059 - Math - Differential Equations: Sin) - , (TDokument3 SeitenAnswer On Question #74059 - Math - Differential Equations: Sin) - , (TlekhaNoch keine Bewertungen
- Annihilator MethodDokument7 SeitenAnnihilator MethodRalph Jason AlvarezNoch keine Bewertungen
- Interpolation by Newtons Divided MethodDokument11 SeitenInterpolation by Newtons Divided Methodtahiruabdulrahmanbaaba3Noch keine Bewertungen
- Práctica Fourier SeriesDokument62 SeitenPráctica Fourier SeriesMIGUEL ANGEL BARRERA TAMAYONoch keine Bewertungen
- MathsDokument12 SeitenMathsmadhavi likharNoch keine Bewertungen
- Assgnment mth622Dokument2 SeitenAssgnment mth622Mahmmood Alam100% (1)
- A-Vol II-2003 - Translated-Salvata PDFDokument69 SeitenA-Vol II-2003 - Translated-Salvata PDFDumitru MihaiNoch keine Bewertungen
- EC400 Micro SOLUTIONS 2018Dokument5 SeitenEC400 Micro SOLUTIONS 2018돔양꿍Noch keine Bewertungen
- Preliminaries OF CalculusDokument27 SeitenPreliminaries OF CalculusainasuhaNoch keine Bewertungen
- Paper: Iit-Jam 2006Dokument4 SeitenPaper: Iit-Jam 2006Mr MNoch keine Bewertungen
- Exercise 3 - SolutionDokument11 SeitenExercise 3 - Solutionמיכאל סויסהNoch keine Bewertungen
- Spline Method of InterpolationDokument7 SeitenSpline Method of InterpolationNadineNoch keine Bewertungen
- Phase Plane Method: Presents byDokument25 SeitenPhase Plane Method: Presents byMona AliNoch keine Bewertungen
- FX X P: Half-Range ExpansionDokument9 SeitenFX X P: Half-Range ExpansionKhaled RamadanNoch keine Bewertungen
- Lecture 11Dokument7 SeitenLecture 11mavisXzeref 17Noch keine Bewertungen
- Ma6468-Probability and Statistics Unit I - Random Variables Ma6468-Probability and Statistics Unit I - Random VariablesDokument110 SeitenMa6468-Probability and Statistics Unit I - Random Variables Ma6468-Probability and Statistics Unit I - Random VariablesMahendran KNoch keine Bewertungen
- Ugc Net Math PDFDokument16 SeitenUgc Net Math PDFRamNoch keine Bewertungen
- (Ch4) - Interpolation-MaterialDokument59 Seiten(Ch4) - Interpolation-MaterialSky FireNoch keine Bewertungen
- Test Code: ME I/ME II, 2009Dokument15 SeitenTest Code: ME I/ME II, 2009paras hasijaNoch keine Bewertungen
- Mat3320 Ass3 SolDokument2 SeitenMat3320 Ass3 SolRichard BeardNoch keine Bewertungen
- Set-A Test Series: JEE Main Full Test - 4 Hints & Solutions MathematicsDokument19 SeitenSet-A Test Series: JEE Main Full Test - 4 Hints & Solutions MathematicsMohammed Aftab AhmedNoch keine Bewertungen
- Final 13Dokument3 SeitenFinal 13Sutirtha SenguptaNoch keine Bewertungen
- Sol 7Dokument6 SeitenSol 7Hollowq RixkNoch keine Bewertungen
- Example: Minimizef (X) 2 X: 11 21 12 22 1 N 2 N 11 21 12 22 1 N 2 NDokument7 SeitenExample: Minimizef (X) 2 X: 11 21 12 22 1 N 2 N 11 21 12 22 1 N 2 Nejg ketselaNoch keine Bewertungen
- EC400 Micro SOLUTIONS 2019Dokument4 SeitenEC400 Micro SOLUTIONS 2019돔양꿍Noch keine Bewertungen
- Questions If The Function F (X) Is Even, Then Which of The Followinf Is Zero? Find The Fourier Coefficient A For The Function F (T) T-T - Pi T PiDokument12 SeitenQuestions If The Function F (X) Is Even, Then Which of The Followinf Is Zero? Find The Fourier Coefficient A For The Function F (T) T-T - Pi T PiSam RockxNoch keine Bewertungen
- Paper 1 Paper With Solution Maths PDFDokument16 SeitenPaper 1 Paper With Solution Maths PDFmehul yoNoch keine Bewertungen
- Gujarat Power Engineering AND Research Institute: Fourier SeriesDokument24 SeitenGujarat Power Engineering AND Research Institute: Fourier Seriesjk cosNoch keine Bewertungen
- MATH1510 Final ExamDokument5 SeitenMATH1510 Final ExamProject usingNoch keine Bewertungen
- Maths-Pt-1 SolutionDokument6 SeitenMaths-Pt-1 SolutionRaju SinghNoch keine Bewertungen
- Chapter 3 InterpolationDokument16 SeitenChapter 3 InterpolationHABIB RebeiNoch keine Bewertungen
- Fill in The Blankets With Proper Answers (5 Marks Each, Total 40 Marks)Dokument5 SeitenFill in The Blankets With Proper Answers (5 Marks Each, Total 40 Marks)adbeanNoch keine Bewertungen
- Continuity, Differentiability and Derivatives: Chapter - 00Dokument39 SeitenContinuity, Differentiability and Derivatives: Chapter - 00Govardhan AshokanNoch keine Bewertungen
- Fourier Series PresentationDokument22 SeitenFourier Series PresentationÊãglê Ēyês100% (1)
- FFT (Fast Fourier Transform)Dokument20 SeitenFFT (Fast Fourier Transform)Hemant Sudhir WavhalNoch keine Bewertungen
- 4 Spline MethodDokument29 Seiten4 Spline MethodEmdad HossainNoch keine Bewertungen
- AP Calculus BC Stuff You Must KnowDokument7 SeitenAP Calculus BC Stuff You Must KnowJulian PradeepNoch keine Bewertungen
- Week 9 FourierSeriesDokument9 SeitenWeek 9 FourierSeriesLuqman NHNoch keine Bewertungen
- Signals and Systems Class 8Dokument5 SeitenSignals and Systems Class 8wizarderbrNoch keine Bewertungen
- 17-18 Spring FinalDokument9 Seiten17-18 Spring FinalAmeer Hazim Ghazi Assa’dNoch keine Bewertungen
- MTH401 23FEB2011FINALPAPERBYShiningStarDokument9 SeitenMTH401 23FEB2011FINALPAPERBYShiningStarMuhammad AtharNoch keine Bewertungen
- SAT - Passport To Advanced Math Module - 7: Topic-Polynomials and Algebraic FractionsDokument9 SeitenSAT - Passport To Advanced Math Module - 7: Topic-Polynomials and Algebraic FractionsMadhav AgarwalNoch keine Bewertungen
- Differential Equations PrintDokument147 SeitenDifferential Equations Printdane mcgwaNoch keine Bewertungen
- OCR A Level Mathematics Sample Question PaperDokument40 SeitenOCR A Level Mathematics Sample Question PaperANoch keine Bewertungen
- Solution Calculus Final Test 2017 - 2018 Semester 1Dokument6 SeitenSolution Calculus Final Test 2017 - 2018 Semester 1Hoàng HàNoch keine Bewertungen
- Chapter 2Dokument16 SeitenChapter 2eng.rayan1996Noch keine Bewertungen
- Math207 HW3Dokument2 SeitenMath207 HW3PramodNoch keine Bewertungen
- Assignment 3Dokument2 SeitenAssignment 3Ravindra ShettyNoch keine Bewertungen
- Discrete-Time Signal Processing: Assignment 8Dokument4 SeitenDiscrete-Time Signal Processing: Assignment 8Dr Jobin ChristNoch keine Bewertungen
- Newton's Divided Difference Polynomial MethodDokument9 SeitenNewton's Divided Difference Polynomial MethodAbdullah IyadNoch keine Bewertungen
- 20122013assignment - 6.pdf 2012/2013 (Assignment 6) : TU Delft - Offshore & Dredging Engineering - Structural DynamicsDokument6 Seiten20122013assignment - 6.pdf 2012/2013 (Assignment 6) : TU Delft - Offshore & Dredging Engineering - Structural DynamicsShashank BabuNoch keine Bewertungen
- UntitledDokument95 SeitenUntitledDependra SinghNoch keine Bewertungen
- Exercises of Chapter 3Dokument2 SeitenExercises of Chapter 3Anh Tuấn PhanNoch keine Bewertungen
- Fourier Series and TransformsDokument21 SeitenFourier Series and TransformsQazi ShaikhNoch keine Bewertungen
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Von EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Noch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Given Data Effective Depth D 17.5 In: Width of Beam B 12 in Height of Beam H 20 inDokument13 SeitenGiven Data Effective Depth D 17.5 In: Width of Beam B 12 in Height of Beam H 20 inSalman AhmadNoch keine Bewertungen
- Xinmmdinmm 0 0.067 100 0.91 200 2.9 300 5.885 400 9.105 500 12.945 600 16.54Dokument2 SeitenXinmmdinmm 0 0.067 100 0.91 200 2.9 300 5.885 400 9.105 500 12.945 600 16.54Salman AhmadNoch keine Bewertungen
- COMSATS University Islamabad Abbottabad Campus: Department of Civil EngineeringDokument1 SeiteCOMSATS University Islamabad Abbottabad Campus: Department of Civil EngineeringSalman AhmadNoch keine Bewertungen
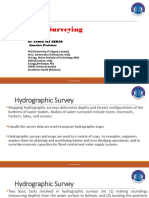
- Advance Surveying: Dr. Tahir Ali Akbar Associate ProfessorDokument17 SeitenAdvance Surveying: Dr. Tahir Ali Akbar Associate ProfessorSalman AhmadNoch keine Bewertungen
- CE 382 L8 - Influence Line DiagramsDokument1 SeiteCE 382 L8 - Influence Line DiagramsSalman AhmadNoch keine Bewertungen
- 2 Ann Architecture NafeesDokument30 Seiten2 Ann Architecture NafeesOreste HernandezNoch keine Bewertungen
- Factoring by GroupingDokument4 SeitenFactoring by GroupingEden SumilayNoch keine Bewertungen
- Bubble Sort PseudocodeDokument2 SeitenBubble Sort PseudocodeKhôi Trần ĐìnhNoch keine Bewertungen
- Method of Finite Elements I: Shape Functions: Adrian EggerDokument12 SeitenMethod of Finite Elements I: Shape Functions: Adrian EggerheinsteinzNoch keine Bewertungen
- IB Math AA SL Binomial TheoremDokument2 SeitenIB Math AA SL Binomial TheoremZiwei Dong100% (1)
- McCarl B.A., Spreen T.H. - Applied Mathematical Programming Using Algebraic Systems PDFDokument567 SeitenMcCarl B.A., Spreen T.H. - Applied Mathematical Programming Using Algebraic Systems PDFrafa_k27Noch keine Bewertungen
- Minimax and Near-Min-imax: University of Toronto, Canada AbstractDokument20 SeitenMinimax and Near-Min-imax: University of Toronto, Canada AbstractFlorinNoch keine Bewertungen
- Factoring GCF - Demo Deped - EditedDokument35 SeitenFactoring GCF - Demo Deped - Editedromeo escarialNoch keine Bewertungen
- Gauss-Seidel Method For Power Flow SolutionDokument20 SeitenGauss-Seidel Method For Power Flow SolutionEngr Syed Numan ShahNoch keine Bewertungen
- Find Rational Zeros: For Your NotebookDokument7 SeitenFind Rational Zeros: For Your Notebook미나Noch keine Bewertungen
- MA3151 Matrices and Calculus Lecture Notes 1Dokument205 SeitenMA3151 Matrices and Calculus Lecture Notes 1VIGNESH VASU100% (10)
- Q1 Solving Real-Life Problems About Polynomials and Polynomial Equations NOTESDokument32 SeitenQ1 Solving Real-Life Problems About Polynomials and Polynomial Equations NOTESallan vargasNoch keine Bewertungen
- Chapter - 2: Fundamentals of Algorithmic Problem SolvingDokument23 SeitenChapter - 2: Fundamentals of Algorithmic Problem SolvingAli JrNoch keine Bewertungen
- Advanced Numerical MethodsDokument12 SeitenAdvanced Numerical MethodsRohit GadekarNoch keine Bewertungen
- Factoring Polynomials With Common Monomial FactorDokument31 SeitenFactoring Polynomials With Common Monomial FactorShawn MikeNoch keine Bewertungen
- Pert.4 Minimization ModelDokument28 SeitenPert.4 Minimization ModelLuthfi RahmanNoch keine Bewertungen
- DLP Genmath W5D2Dokument4 SeitenDLP Genmath W5D2esperidacedrickpaulNoch keine Bewertungen
- Unit 3c Linear RegressionDokument98 SeitenUnit 3c Linear RegressionMadhav ChaudharyNoch keine Bewertungen
- Polynomial ReviewDokument16 SeitenPolynomial ReviewChloe Y.Noch keine Bewertungen
- Lecture9 Dropout Optimization CnnsDokument79 SeitenLecture9 Dropout Optimization CnnsSaeed FirooziNoch keine Bewertungen
- Dynamic ProgrammingDokument35 SeitenDynamic ProgrammingMuhammad JunaidNoch keine Bewertungen
- CBSE 9 Maths Polynomials PDFDokument38 SeitenCBSE 9 Maths Polynomials PDFRaviNoch keine Bewertungen
- Lec 08 - Hill ClimbingDokument42 SeitenLec 08 - Hill ClimbingMateen AhmedNoch keine Bewertungen
- Algorithms & Data Structure I - Lecture 5Dokument26 SeitenAlgorithms & Data Structure I - Lecture 5Waleed HåšhįmNoch keine Bewertungen
- Game Theory LectureDokument28 SeitenGame Theory LectureMd. ShahinoorNoch keine Bewertungen
- Search Algorithms in AI7Dokument13 SeitenSearch Algorithms in AI7jhn75070Noch keine Bewertungen
- 2023 Ullash Deb Nath ADA MidtermDokument24 Seiten2023 Ullash Deb Nath ADA Midtermlirina4508Noch keine Bewertungen
- Numerical Method PDFDokument2 SeitenNumerical Method PDFPratik BajracharyaNoch keine Bewertungen
- Homework #4: Interpolation and Polynomial Approximation / Curve FittingDokument9 SeitenHomework #4: Interpolation and Polynomial Approximation / Curve FittingAndres MendezNoch keine Bewertungen