Das könnte Ihnen auch gefallen
- Hardware Manual: JY992D73401ADokument8 SeitenHardware Manual: JY992D73401ATrung kien NguyenNoch keine Bewertungen
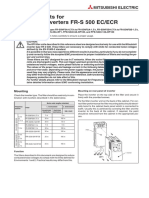
- RFI Filter Units For Frequency Inverters FR-S 500 EC/ECR: Mitsubishi ElectricDokument4 SeitenRFI Filter Units For Frequency Inverters FR-S 500 EC/ECR: Mitsubishi ElectricTrung kien NguyenNoch keine Bewertungen
- User'S Manual: Guidelines For The Safety of The User and Protection of The FX - 2EYT-BDDokument6 SeitenUser'S Manual: Guidelines For The Safety of The User and Protection of The FX - 2EYT-BDTrung kien NguyenNoch keine Bewertungen
- MRC IO StructureDokument53 SeitenMRC IO Structureeleceng1979Noch keine Bewertungen
- Mastercam X Building PostsDokument29 SeitenMastercam X Building Postsmrbwsmithjr100% (4)
- System Initiaization Procedure - 1Dokument1 SeiteSystem Initiaization Procedure - 1Trung kien NguyenNoch keine Bewertungen
- Ethernet Connection To A Robot ProgramDokument4 SeitenEthernet Connection To A Robot ProgramTrung kien NguyenNoch keine Bewertungen
- 90205-1107DEC FS03N, FC03N, FW03N Inspection and Maintenance ManualDokument12 Seiten90205-1107DEC FS03N, FC03N, FW03N Inspection and Maintenance ManualTrung kien NguyenNoch keine Bewertungen
- BK - Manual (En)Dokument2 SeitenBK - Manual (En)Trung kien NguyenNoch keine Bewertungen
- Sinano Ja enDokument53 SeitenSinano Ja enTrung kien NguyenNoch keine Bewertungen
- Software Instalation R-J2Dokument213 SeitenSoftware Instalation R-J2Marcelo Fiod HasmanNoch keine Bewertungen
- 5 I 25 ManDokument23 Seiten5 I 25 ManTrung kien NguyenNoch keine Bewertungen
- Sinano Ja enDokument53 SeitenSinano Ja enTrung kien NguyenNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- NetBackup102 InstallGuideDokument217 SeitenNetBackup102 InstallGuidedixade1732Noch keine Bewertungen
- Web Mining and Web Usage Mining Techniques: Bulletin de La Société Des Sciences de Liège, Vol. 85, 2016, P. 321 - 328Dokument8 SeitenWeb Mining and Web Usage Mining Techniques: Bulletin de La Société Des Sciences de Liège, Vol. 85, 2016, P. 321 - 328Lalisa DugasaNoch keine Bewertungen
- D Ge 8 DB JDokument18 SeitenD Ge 8 DB Jfoxmader6666Noch keine Bewertungen
- Wifi Led Better UiDokument3 SeitenWifi Led Better Uilucca1xNoch keine Bewertungen
- Eghosa ResumeDokument3 SeitenEghosa ResumeashokNoch keine Bewertungen
- 7.4.7 Lab - Install The Virtual MachineDokument5 Seiten7.4.7 Lab - Install The Virtual MachineDiego Chi VilchezNoch keine Bewertungen
- Basic 1Dokument39 SeitenBasic 1ycNoch keine Bewertungen
- Vissim 2021 - COM IntroDokument39 SeitenVissim 2021 - COM IntroTeleco PoliNoch keine Bewertungen
- Thesis Archive SystemDokument8 SeitenThesis Archive Systemafkofvidg100% (2)
- User-Centred Web Design: Human Computer InteractionDokument22 SeitenUser-Centred Web Design: Human Computer InteractionMastersuppNoch keine Bewertungen
- Empowerment Lesson 4Dokument25 SeitenEmpowerment Lesson 4dayandang20Noch keine Bewertungen
- PHP Misc. FunctionsDokument4 SeitenPHP Misc. FunctionsThant ThantNoch keine Bewertungen
- Training NotesDokument8 SeitenTraining NotesRajesh SelvarajanNoch keine Bewertungen
- Final ReportDokument50 SeitenFinal ReportAnkyit BhandariNoch keine Bewertungen
- Employee Welfare ManagementDokument31 SeitenEmployee Welfare ManagementGokul krishnanNoch keine Bewertungen
- Word 2016 - Headers and FootersDokument11 SeitenWord 2016 - Headers and Footersdeborah galangNoch keine Bewertungen
- Module 5 Metadata Schema Assignment TemplateDokument6 SeitenModule 5 Metadata Schema Assignment Templateapi-547265305Noch keine Bewertungen
- A. Nested Function: Multiple Choice Questions of Microsoft ExcelDokument18 SeitenA. Nested Function: Multiple Choice Questions of Microsoft ExcelAshwiniNoch keine Bewertungen
- Infor M3 H5 Development Guide: Version 10.3.1, 10.4.0 Published January 2018Dokument106 SeitenInfor M3 H5 Development Guide: Version 10.3.1, 10.4.0 Published January 2018Giovanni LeonardiNoch keine Bewertungen
- "Government Polytechnic College Palakkad": PROJECT REPORT 2020-2021Dokument40 Seiten"Government Polytechnic College Palakkad": PROJECT REPORT 2020-2021Akash ANoch keine Bewertungen
- DineshPrasadMahato - UI DeveloperDokument2 SeitenDineshPrasadMahato - UI DeveloperUsha MNoch keine Bewertungen
- How To Download and Install Latest MoshellDokument4 SeitenHow To Download and Install Latest MoshellArry HaryantoNoch keine Bewertungen
- Userguide 5Dokument174 SeitenUserguide 5fbd123Noch keine Bewertungen
- Lab Exercise - 1 Introduction To Microsoft DOS (Command Prompt)Dokument17 SeitenLab Exercise - 1 Introduction To Microsoft DOS (Command Prompt)jak messi100% (1)
- COBOL Course - Modules 1 Thru 12 - CICSDokument610 SeitenCOBOL Course - Modules 1 Thru 12 - CICSVictor SalazarNoch keine Bewertungen
- Rich Internet Applications (Rias) : Characteristics of RiaDokument24 SeitenRich Internet Applications (Rias) : Characteristics of Riaanam khanNoch keine Bewertungen
- 9-12 Service Development HelpDokument1.110 Seiten9-12 Service Development HelpSushma wMEDINoch keine Bewertungen
- Automation Anywhere Advanced RPA Professional Exam Dumps 2022Dokument2 SeitenAutomation Anywhere Advanced RPA Professional Exam Dumps 2022maniNoch keine Bewertungen
- Module 3 EMPOWERMENT TECHNOLOGYDokument36 SeitenModule 3 EMPOWERMENT TECHNOLOGYYheada Marie PonceNoch keine Bewertungen
- Usmanalisupport - PK 70878Dokument22 SeitenUsmanalisupport - PK 70878Umer FarooqNoch keine Bewertungen