Das könnte Ihnen auch gefallen
- On Fast Channel Polarization of Double-Layer Binary Discrete MemoDokument10 SeitenOn Fast Channel Polarization of Double-Layer Binary Discrete MemoSOURAV DASNoch keine Bewertungen
- Polar Codes For Cooperative RelayingDokument11 SeitenPolar Codes For Cooperative RelayingMehmet KibarNoch keine Bewertungen
- Error-Correction on Non-Standard Communication ChannelsVon EverandError-Correction on Non-Standard Communication ChannelsNoch keine Bewertungen
- A Nearly Optimal Method of Polar Code Constructions For The AWGN ChannelDokument9 SeitenA Nearly Optimal Method of Polar Code Constructions For The AWGN ChannelRobert Mota OliveiraNoch keine Bewertungen
- 07-Channel Coding-The Road To Channel CapacityDokument28 Seiten07-Channel Coding-The Road To Channel CapacityKaan IbisNoch keine Bewertungen
- Polar Codes For Error Correction: Analysis and Decoding AlgorithmsDokument77 SeitenPolar Codes For Error Correction: Analysis and Decoding AlgorithmsMehmet KibarNoch keine Bewertungen
- Cui2009p19510 1109TSP 2008 2009025 PDFDokument14 SeitenCui2009p19510 1109TSP 2008 2009025 PDFhendra lamNoch keine Bewertungen
- TurboDokument10 SeitenTurboAlireza MovahedianNoch keine Bewertungen
- Improving Ber Using Turbo Codes in Ofdm SystemsDokument5 SeitenImproving Ber Using Turbo Codes in Ofdm Systemsmohammed ayadNoch keine Bewertungen
- Different Channel Coding Techniques in MIMO-OFDMDokument5 SeitenDifferent Channel Coding Techniques in MIMO-OFDMHameed Ullah MarwatNoch keine Bewertungen
- Noncoherent Physical-Layer Network Coding With FSK Modulation: Relay Receiver Design IssuesDokument10 SeitenNoncoherent Physical-Layer Network Coding With FSK Modulation: Relay Receiver Design IssuesramrcvNoch keine Bewertungen
- BER Comparison Between Turbo, LDPC, and Polar CodesDokument7 SeitenBER Comparison Between Turbo, LDPC, and Polar CodesGkhn MnrsNoch keine Bewertungen
- CS1 - 40711502818 - Jatin GargDokument4 SeitenCS1 - 40711502818 - Jatin GargVedant KaushishNoch keine Bewertungen
- Doan WileyDokument15 SeitenDoan Wileytele comNoch keine Bewertungen
- Study of Polar CodeDokument3 SeitenStudy of Polar CodeInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Codebook Design For Uniform Rectangular Arrays of Massive AntennasDokument5 SeitenCodebook Design For Uniform Rectangular Arrays of Massive AntennasFahd SaifNoch keine Bewertungen
- Information Theory and Coding Case Study: Topic: Use of Forward Error Correction Code For White Gaussian Noise ChannelsDokument3 SeitenInformation Theory and Coding Case Study: Topic: Use of Forward Error Correction Code For White Gaussian Noise ChannelsVaibhav MisraNoch keine Bewertungen
- C3.3.Applying Chaotic Maps To Interleaving Scheme Design in BICM-IDDokument4 SeitenC3.3.Applying Chaotic Maps To Interleaving Scheme Design in BICM-IDthangNoch keine Bewertungen
- MIMO OFDM Limted FeedbackDokument6 SeitenMIMO OFDM Limted FeedbackYasser NaguibNoch keine Bewertungen
- Decoding of The Extended Golay Code by The Simplified Successive-Cancellation List Decoder Adapted To Multi-Kernel Polar CodesDokument9 SeitenDecoding of The Extended Golay Code by The Simplified Successive-Cancellation List Decoder Adapted To Multi-Kernel Polar CodesTELKOMNIKANoch keine Bewertungen
- Turbo Codes: Farah Ilyas Vohra (TC-28), Shafaq Mustafa (TC-13), Sabieka Rizvi (TC-61) and Zainab Qazi (TC-11)Dokument5 SeitenTurbo Codes: Farah Ilyas Vohra (TC-28), Shafaq Mustafa (TC-13), Sabieka Rizvi (TC-61) and Zainab Qazi (TC-11)Zainab QaziNoch keine Bewertungen
- Ada633537 PDFDokument11 SeitenAda633537 PDFnour el houda bourabaNoch keine Bewertungen
- Ada633537 PDFDokument11 SeitenAda633537 PDFnour el houda bourabaNoch keine Bewertungen
- Polar Coding For The Multiple Access WiretapDokument19 SeitenPolar Coding For The Multiple Access WiretapMehmet KibarNoch keine Bewertungen
- Paper - 2011 - Designs of Bhattacharyya Parameter in The Construction of Polar Codes - Shengmei ZhaoDokument4 SeitenPaper - 2011 - Designs of Bhattacharyya Parameter in The Construction of Polar Codes - Shengmei Zhaorobertmotaoliveira73Noch keine Bewertungen
- Of Cdma: Performance Multi-Code in A Multipath Fading ChannelDokument6 SeitenOf Cdma: Performance Multi-Code in A Multipath Fading Channelfeku fekuNoch keine Bewertungen
- Polarization Weight Family Methods For Polar Code ConstructionDokument5 SeitenPolarization Weight Family Methods For Polar Code ConstructionNur IndahNoch keine Bewertungen
- Random Neural Network Decoder For Error Correcting CodesDokument5 SeitenRandom Neural Network Decoder For Error Correcting CodesKiran maruNoch keine Bewertungen
- Li 2006Dokument11 SeitenLi 2006mohamedezzelden30Noch keine Bewertungen
- Fec in OfcDokument22 SeitenFec in OfcselverarslanNoch keine Bewertungen
- Fast Sequential Decoding of Polar CodesDokument19 SeitenFast Sequential Decoding of Polar CodesBui Van ThanhNoch keine Bewertungen
- Space-Time Block Coding For Wireless CommunicationDokument11 SeitenSpace-Time Block Coding For Wireless CommunicationNandha KumarNoch keine Bewertungen
- Optical Paper 4Dokument10 SeitenOptical Paper 4Pir Meher Ali Eng DepartmentNoch keine Bewertungen
- Impact of 4D Channel Distribution On The Achievable Rates in Coherent Optical Communication ExperimentsDokument11 SeitenImpact of 4D Channel Distribution On The Achievable Rates in Coherent Optical Communication ExperimentsAnupriya GhoshNoch keine Bewertungen
- BER of OFDM System Using Concatenated Forward Error Correcting Codes (FEC) Over Nakagami-M Fading ChannelDokument5 SeitenBER of OFDM System Using Concatenated Forward Error Correcting Codes (FEC) Over Nakagami-M Fading Channelseventhsensegroup100% (1)
- Performance Analysis of PAPR in MC-CDMA Using Code: GolayDokument5 SeitenPerformance Analysis of PAPR in MC-CDMA Using Code: GolayAbel CarlosNoch keine Bewertungen
- SCVT FinalDokument6 SeitenSCVT FinalAbhishek Parochi Engineer thisNoch keine Bewertungen
- 4IJSRPDokument6 Seiten4IJSRPzqassem05Noch keine Bewertungen
- 4 - Digital ModulationDokument30 Seiten4 - Digital ModulationJin MacaranasNoch keine Bewertungen
- First Test Total Marks: 25 Sl. No Questions Marks CO LevelDokument8 SeitenFirst Test Total Marks: 25 Sl. No Questions Marks CO LevelAadilNoch keine Bewertungen
- Underwater Acoustic Channel: MC-CDMA Via Carrier Interferometry Codes in AnDokument5 SeitenUnderwater Acoustic Channel: MC-CDMA Via Carrier Interferometry Codes in An283472 ktr.phd.ece.19Noch keine Bewertungen
- Performance Analysis of ConcatenatedDokument4 SeitenPerformance Analysis of ConcatenatedNawrasNoch keine Bewertungen
- Relay Channel ThesisDokument6 SeitenRelay Channel Thesischelseaporterpittsburgh100% (2)
- Line Code For Optical FibDokument13 SeitenLine Code For Optical FibMayank SainiNoch keine Bewertungen
- Digital Communications: Courses and Exercises with SolutionsVon EverandDigital Communications: Courses and Exercises with SolutionsBewertung: 3 von 5 Sternen3/5 (2)
- Error Control Schemes For Networks: An Overview: A A A BDokument16 SeitenError Control Schemes For Networks: An Overview: A A A BFariz AhdiatamaNoch keine Bewertungen
- Design of LDPC For Mod and DetDokument9 SeitenDesign of LDPC For Mod and Detchaudhryadnanaslam3799Noch keine Bewertungen
- Codebook Design For Lte-AdvDokument5 SeitenCodebook Design For Lte-AdvYasser NaguibNoch keine Bewertungen
- SpacediversityDokument5 SeitenSpacediversityHakunaMatata_76Noch keine Bewertungen
- Modeling and Analyzing The Ber Performance of Ofdm-Mimo System With 16-Qam Using Ostbc For Wireless Communication Based On MatlabDokument10 SeitenModeling and Analyzing The Ber Performance of Ofdm-Mimo System With 16-Qam Using Ostbc For Wireless Communication Based On MatlabTJPRC PublicationsNoch keine Bewertungen
- Improved Space-Time Coding For MIMO-OFDM Wireless CommunicationsDokument6 SeitenImproved Space-Time Coding For MIMO-OFDM Wireless Communicationsdhan_anjiNoch keine Bewertungen
- 10 1109@WCNCW48565 2020 9124897Dokument6 Seiten10 1109@WCNCW48565 2020 9124897tortablack3Noch keine Bewertungen
- Interference AlignmentDokument136 SeitenInterference AlignmentArdah KhaledNoch keine Bewertungen
- IAETSD-JARAS-Simulink Design of DVB-T2 Systemusing BCH and LDPC CodesDokument5 SeitenIAETSD-JARAS-Simulink Design of DVB-T2 Systemusing BCH and LDPC CodesiaetsdiaetsdNoch keine Bewertungen
- Ocs PDFDokument4 SeitenOcs PDFMudit GoelNoch keine Bewertungen
- Performance of LDPC Codes For SatelliteDokument4 SeitenPerformance of LDPC Codes For SatelliteMohamed MydeenNoch keine Bewertungen
- Convolutional Code of Rate 2/3 To Approach The Theoretical Limit Imposed by Shannon's Channel CapacityDokument4 SeitenConvolutional Code of Rate 2/3 To Approach The Theoretical Limit Imposed by Shannon's Channel CapacitySrihari vNoch keine Bewertungen
- Analytical Study of Signal Processing On Wimax System Via Physical Layer Simulation Build On Ieee802.16 StandardDokument5 SeitenAnalytical Study of Signal Processing On Wimax System Via Physical Layer Simulation Build On Ieee802.16 StandardSushil kumarNoch keine Bewertungen
- Channel Quality Indicator Feedback in Long Term Evolution (LTE) SystemDokument6 SeitenChannel Quality Indicator Feedback in Long Term Evolution (LTE) SystemMED MOHNoch keine Bewertungen
- Multiresolution Signal Decomposition: Transforms, Subbands, and WaveletsVon EverandMultiresolution Signal Decomposition: Transforms, Subbands, and WaveletsNoch keine Bewertungen
- Student Exploration: Inclined Plane - Simple MachineDokument9 SeitenStudent Exploration: Inclined Plane - Simple MachineLuka MkrtichyanNoch keine Bewertungen
- Kyle Pape - Between Queer Theory and Native Studies, A Potential For CollaborationDokument16 SeitenKyle Pape - Between Queer Theory and Native Studies, A Potential For CollaborationRafael Alarcón Vidal100% (1)
- Illustrating An Experiment, Outcome, Sample Space and EventDokument9 SeitenIllustrating An Experiment, Outcome, Sample Space and EventMarielle MunarNoch keine Bewertungen
- Obligatoire: Connectez-Vous Pour ContinuerDokument2 SeitenObligatoire: Connectez-Vous Pour ContinuerRaja Shekhar ChinnaNoch keine Bewertungen
- postedcontentadminuploadsFAQs20for20Organization PDFDokument10 SeitenpostedcontentadminuploadsFAQs20for20Organization PDFMohd Adil AliNoch keine Bewertungen
- Week 4 - Theoretical Framework - LectureDokument13 SeitenWeek 4 - Theoretical Framework - LectureRayan Al-ShibliNoch keine Bewertungen
- PSA Poster Project WorkbookDokument38 SeitenPSA Poster Project WorkbookwalliamaNoch keine Bewertungen
- Microsmart GEODTU Eng 7Dokument335 SeitenMicrosmart GEODTU Eng 7Jim JonesjrNoch keine Bewertungen
- Miniature Daisy: Crochet Pattern & InstructionsDokument8 SeitenMiniature Daisy: Crochet Pattern & Instructionscaitlyn g100% (1)
- Evolution Army 3 R DadDokument341 SeitenEvolution Army 3 R DadStanisław DisęNoch keine Bewertungen
- CHAPTER 1 SBL NotesDokument13 SeitenCHAPTER 1 SBL NotesPrieiya WilliamNoch keine Bewertungen
- Disassembly Procedures: 1 DELL U2422HB - U2422HXBDokument6 SeitenDisassembly Procedures: 1 DELL U2422HB - U2422HXBIonela CristinaNoch keine Bewertungen
- Toeic: Check Your English Vocabulary ForDokument41 SeitenToeic: Check Your English Vocabulary ForEva Ibáñez RamosNoch keine Bewertungen
- Mosfet Irfz44Dokument8 SeitenMosfet Irfz44huynhsang1979Noch keine Bewertungen
- Week-3-Q1-Gen Chem-Sep-11-15-DllDokument12 SeitenWeek-3-Q1-Gen Chem-Sep-11-15-DllJennette BelliotNoch keine Bewertungen
- DeliciousDoughnuts Eguide PDFDokument35 SeitenDeliciousDoughnuts Eguide PDFSofi Cherny83% (6)
- Nadee 3Dokument1 SeiteNadee 3api-595436597Noch keine Bewertungen
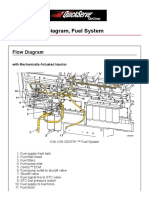
- Cummin C1100 Fuel System Flow DiagramDokument8 SeitenCummin C1100 Fuel System Flow DiagramDaniel KrismantoroNoch keine Bewertungen
- Chhay Chihour - SS402 Mid-Term 2020 - E4.2Dokument8 SeitenChhay Chihour - SS402 Mid-Term 2020 - E4.2Chi Hour100% (1)
- Thesis PaperDokument53 SeitenThesis PaperAnonymous AOOrehGZAS100% (1)
- Z-Purlins: Technical DocumentationDokument11 SeitenZ-Purlins: Technical Documentationardit bedhiaNoch keine Bewertungen
- WAQF Podium Design Presentation 16 April 2018Dokument23 SeitenWAQF Podium Design Presentation 16 April 2018hoodqy99Noch keine Bewertungen
- Delonghi Esam Series Service Info ItalyDokument10 SeitenDelonghi Esam Series Service Info ItalyBrko BrkoskiNoch keine Bewertungen
- Heimbach - Keeping Formingfabrics CleanDokument4 SeitenHeimbach - Keeping Formingfabrics CleanTunç TürkNoch keine Bewertungen
- (1921) Manual of Work Garment Manufacture: How To Improve Quality and Reduce CostsDokument102 Seiten(1921) Manual of Work Garment Manufacture: How To Improve Quality and Reduce CostsHerbert Hillary Booker 2nd100% (1)
- C2 - Conveyors Diagram: Peso de Faja Longitud de CargaDokument1 SeiteC2 - Conveyors Diagram: Peso de Faja Longitud de CargaIvan CruzNoch keine Bewertungen
- LSCM Course OutlineDokument13 SeitenLSCM Course OutlineDeep SachetiNoch keine Bewertungen
- Quarter 1-Week 2 - Day 2.revisedDokument4 SeitenQuarter 1-Week 2 - Day 2.revisedJigz FamulaganNoch keine Bewertungen
- Physics Education Thesis TopicsDokument4 SeitenPhysics Education Thesis TopicsPaperWriterServicesCanada100% (2)
- SachinDokument3 SeitenSachinMahendraNoch keine Bewertungen