Das könnte Ihnen auch gefallen
- Liang1996 PDFDokument15 SeitenLiang1996 PDFbaja2014Noch keine Bewertungen
- Effects of Tropospheric Refraction On Radiowave Propagation: Recommendation Itu-R P.834-4Dokument11 SeitenEffects of Tropospheric Refraction On Radiowave Propagation: Recommendation Itu-R P.834-4Madeline CurryNoch keine Bewertungen
- DebBurman Et Al 2020 SNAS SUPP1Dokument5 SeitenDebBurman Et Al 2020 SNAS SUPP1Harekrushna SahooNoch keine Bewertungen
- Required Reading:: Daily High-Resolution-Blended Analyses For Sea Surface TemperatureDokument15 SeitenRequired Reading:: Daily High-Resolution-Blended Analyses For Sea Surface TemperatureAmadeo BellottiNoch keine Bewertungen
- Maier-2011-Atmospheric Correction of Thermal-Infrared Imagery of The 3D Urban Environment Acquired in Oblique Viewing GeometryDokument14 SeitenMaier-2011-Atmospheric Correction of Thermal-Infrared Imagery of The 3D Urban Environment Acquired in Oblique Viewing GeometryJairo AcuñaNoch keine Bewertungen
- Energies: Estimating Air Density Using Observations and Re-Analysis Outputs For Wind Energy PurposesDokument12 SeitenEnergies: Estimating Air Density Using Observations and Re-Analysis Outputs For Wind Energy PurposesImran AhmedNoch keine Bewertungen
- Diffraction of Radio Waves in A Stratified TroposphereDokument16 SeitenDiffraction of Radio Waves in A Stratified TroposphereKay WhiteNoch keine Bewertungen
- Cloud Base HeightsDokument3 SeitenCloud Base Heightssealand skyNoch keine Bewertungen
- A EmissivityAtmospherIRDokument3 SeitenA EmissivityAtmospherIRjmloptroNoch keine Bewertungen
- Remote SensingDokument20 SeitenRemote SensingSupriyaNoch keine Bewertungen
- Article v3Dokument29 SeitenArticle v3RafaelNoch keine Bewertungen
- Notes On Spectral MethodsDokument18 SeitenNotes On Spectral MethodsrosoportNoch keine Bewertungen
- Study of Ballistic Parameters For Projectile Range ExtensionDokument7 SeitenStudy of Ballistic Parameters For Projectile Range ExtensionMohamed MohamedNoch keine Bewertungen
- King Fahd University of Petroleum and Minerals: Combined Convection and Radiation Heat Transfer (H2)Dokument17 SeitenKing Fahd University of Petroleum and Minerals: Combined Convection and Radiation Heat Transfer (H2)hutime44Noch keine Bewertungen
- (Journal of Applied Meteorology and Climatology) A Numerical Model of The Urban Heat IslandDokument11 Seiten(Journal of Applied Meteorology and Climatology) A Numerical Model of The Urban Heat Islandbian xieNoch keine Bewertungen
- Sinking of A Horizontal Cylinder: Dominic VellaDokument3 SeitenSinking of A Horizontal Cylinder: Dominic VellaJuan Manuel ScarpettaNoch keine Bewertungen
- 19800020333Dokument14 Seiten19800020333rittalNoch keine Bewertungen
- Cosmog PDFDokument10 SeitenCosmog PDFAlexandre Masson VicenteNoch keine Bewertungen
- Analysis of Range of Cannonball Using ScilabDokument16 SeitenAnalysis of Range of Cannonball Using ScilabSandeepNoch keine Bewertungen
- Chapter 2 - Lecture 5 20-12-2011 PDFDokument17 SeitenChapter 2 - Lecture 5 20-12-2011 PDFIndhu ElangoNoch keine Bewertungen
- PropellerNoiseFields Carley2000Dokument23 SeitenPropellerNoiseFields Carley2000Wouterr GNoch keine Bewertungen
- Steady Steam Condensation On An Extended Surface With Suction of CondensateDokument24 SeitenSteady Steam Condensation On An Extended Surface With Suction of Condensatealentan_774042Noch keine Bewertungen
- Performance Simulation in High Altitude Platforms (Haps) Communications SystemsDokument9 SeitenPerformance Simulation in High Altitude Platforms (Haps) Communications SystemsdheerajnehruNoch keine Bewertungen
- Gear Analysis 11Dokument22 SeitenGear Analysis 11premnathgopinathanNoch keine Bewertungen
- Fluid Mechanics 8Th Edition White Solutions Manual Full Chapter PDFDokument67 SeitenFluid Mechanics 8Th Edition White Solutions Manual Full Chapter PDFfionaalexandrahukc100% (13)
- QP GeolM 23 GEO PHYSICS PAPER II 250623Dokument13 SeitenQP GeolM 23 GEO PHYSICS PAPER II 250623Arvind sharmaNoch keine Bewertungen
- Publications 2004 12Dokument16 SeitenPublications 2004 12mrizalpahleviNoch keine Bewertungen
- Water Vapour Profiles by Ground-Based FTIR Spectroscopy: Study For An Optimised Retrieval and Its ValidationDokument20 SeitenWater Vapour Profiles by Ground-Based FTIR Spectroscopy: Study For An Optimised Retrieval and Its ValidationIonut ZoltanNoch keine Bewertungen
- Blais 2008 BDokument9 SeitenBlais 2008 Bhongfq666Noch keine Bewertungen
- Air-Pollution-Meteorology UNIT IIDokument91 SeitenAir-Pollution-Meteorology UNIT IIDR. Ramesh ChandragiriNoch keine Bewertungen
- Generalized Method of Biparametric Sub Pixel Thermal LocationDokument5 SeitenGeneralized Method of Biparametric Sub Pixel Thermal LocationДианаNoch keine Bewertungen
- Earth Curvature CorrectionDokument7 SeitenEarth Curvature CorrectionEugene QuahNoch keine Bewertungen
- Norwegian Meteorological Institute's Real-Time Dispersion Model Snap (Severe Nuclear Accident Program) : Runs For ETEX and ATMES II Experiments With Different Meteorological InputDokument7 SeitenNorwegian Meteorological Institute's Real-Time Dispersion Model Snap (Severe Nuclear Accident Program) : Runs For ETEX and ATMES II Experiments With Different Meteorological InputInformare Per ResistereNoch keine Bewertungen
- AE 301 - Aerodynamics I - Spring 2015 Answers To Problem Set 2Dokument9 SeitenAE 301 - Aerodynamics I - Spring 2015 Answers To Problem Set 2TheTannedFishNoch keine Bewertungen
- Laminar Forced Convection Heat and Mass Transfer of Humid Air Across A Vertical Plate With CondensationDokument11 SeitenLaminar Forced Convection Heat and Mass Transfer of Humid Air Across A Vertical Plate With Condensationait hssainNoch keine Bewertungen
- Doctors 2023Dokument24 SeitenDoctors 2023Helen DoctorsNoch keine Bewertungen
- TDS Technique For Gas WellTDokument11 SeitenTDS Technique For Gas WellTMounirNoch keine Bewertungen
- Thin-Layer Method: Formulation in The Time DomainDokument15 SeitenThin-Layer Method: Formulation in The Time DomainTarun NaskarNoch keine Bewertungen
- Et TvdiDokument10 SeitenEt TvdiGualberto Machaca MendietaNoch keine Bewertungen
- Atmospheric Soundings Stability - ActivitiesDokument9 SeitenAtmospheric Soundings Stability - ActivitiesAdrià Chavanel I SaltóNoch keine Bewertungen
- Plus Minus MethodDokument34 SeitenPlus Minus Methodlucho mpNoch keine Bewertungen
- Current Status of Mixed LNG Storage Technology Development: Back GroundDokument5 SeitenCurrent Status of Mixed LNG Storage Technology Development: Back GroundmimoNoch keine Bewertungen
- Image Theory EM Fields of Horizontal Dipole Antennas in Presence of Conducting Half-SpaceDokument36 SeitenImage Theory EM Fields of Horizontal Dipole Antennas in Presence of Conducting Half-SpacesmartmathNoch keine Bewertungen
- SaedffcsedcvfaDokument7 SeitenSaedffcsedcvfaJames YoungNoch keine Bewertungen
- Hoyer 2002 Solar Ressource WRECDokument5 SeitenHoyer 2002 Solar Ressource WRECKiran NairNoch keine Bewertungen
- (1975) Development of Real Synthetic Time Histories To Match Smooth Design SpectraDokument8 Seiten(1975) Development of Real Synthetic Time Histories To Match Smooth Design SpectraMohammad AshrafyNoch keine Bewertungen
- The Near, Medium I.R. Earth Albedo Its Use For Cloud Height DeterminationDokument14 SeitenThe Near, Medium I.R. Earth Albedo Its Use For Cloud Height DeterminationKumar SumanNoch keine Bewertungen
- Spectral CoreDokument19 SeitenSpectral Core黃建成Noch keine Bewertungen
- Anandaraj 05 G01b.6 (01227) PDFDokument4 SeitenAnandaraj 05 G01b.6 (01227) PDFsayanamNoch keine Bewertungen
- Lecture Tropospheric DelayDokument15 SeitenLecture Tropospheric DelaygwisnuNoch keine Bewertungen
- Modelling Transit Time Using GR and RT Logs PDFDokument6 SeitenModelling Transit Time Using GR and RT Logs PDFroshmediaNoch keine Bewertungen
- Numerical Simulation of A Thermoacoustic Refrigerator: II. Stratified Flow Around The StackDokument26 SeitenNumerical Simulation of A Thermoacoustic Refrigerator: II. Stratified Flow Around The StacksaekNoch keine Bewertungen
- Atmospheric Refraction Errors For Optical InstrumentationDokument25 SeitenAtmospheric Refraction Errors For Optical InstrumentationAnonymous WXzHbcQNoch keine Bewertungen
- The Large Velocity Gradient Approach: Charlotte VASTELDokument7 SeitenThe Large Velocity Gradient Approach: Charlotte VASTELgeocowNoch keine Bewertungen
- Numerical Solution of A Cylindrical Heat Conduction Problem Using A Model TechniqueDokument16 SeitenNumerical Solution of A Cylindrical Heat Conduction Problem Using A Model TechniqueGabriel SaavedraNoch keine Bewertungen
- Oceanographic Applications 29Dokument6 SeitenOceanographic Applications 29Heron SurbaktiNoch keine Bewertungen
- Computer Methods in Applied Mechanics and EngineeringDokument14 SeitenComputer Methods in Applied Mechanics and Engineeringosoreneg100% (1)
- A Three-Dimensional Backward Lagrangian Footprint Model For A Wide Range of Boundary-Layer StratificationsDokument22 SeitenA Three-Dimensional Backward Lagrangian Footprint Model For A Wide Range of Boundary-Layer StratificationsNicolas BorgesNoch keine Bewertungen
- Improving Physics With Cansat: Giovanni Bindi (Giovanni - Bindi@Istruzione - It) Istituto Zoli, Atri, Te, ItalyDokument20 SeitenImproving Physics With Cansat: Giovanni Bindi (Giovanni - Bindi@Istruzione - It) Istituto Zoli, Atri, Te, ItalyNatsu DragneelNoch keine Bewertungen
- Structural Mechanics - Summary and ProblemsDokument15 SeitenStructural Mechanics - Summary and ProblemsMahmud MuhammadNoch keine Bewertungen
- SFD and BMDDokument278 SeitenSFD and BMDRama KumarNoch keine Bewertungen
- 3D StressDokument42 Seiten3D Stresswsjouri2510100% (1)
- Chapter 6Dokument6 SeitenChapter 6Mahmud MuhammadNoch keine Bewertungen
- HW 7Dokument10 SeitenHW 7Mahmud MuhammadNoch keine Bewertungen
- AER103 - HW04SolnDokument5 SeitenAER103 - HW04SolnMahmud MuhammadNoch keine Bewertungen
- Negative Poissons RatioDokument5 SeitenNegative Poissons RatioMahmud MuhammadNoch keine Bewertungen
- Hook's LawDokument3 SeitenHook's LawMahmud MuhammadNoch keine Bewertungen
- Mechanics of Materials: Torsional Loads On Circular ShaftsDokument12 SeitenMechanics of Materials: Torsional Loads On Circular ShaftsMahmud MuhammadNoch keine Bewertungen
- Haneefkureishi 140203121510 Phpapp02Dokument25 SeitenHaneefkureishi 140203121510 Phpapp02Ms. GuideNoch keine Bewertungen
- Peabody Winners BookDokument102 SeitenPeabody Winners BookpeabodyawardsNoch keine Bewertungen
- Superheterodyne ReceiverDokument14 SeitenSuperheterodyne ReceiverVarun MandalapuNoch keine Bewertungen
- Lee Se YoungDokument4 SeitenLee Se Youngdian5christiani5malaNoch keine Bewertungen
- Lirik Lagu EXODokument7 SeitenLirik Lagu EXOWahyu AprilliaNoch keine Bewertungen
- Total Individual Control Technology - Insider Exposes How You and Your DNA Are Being Targeted PDFDokument9 SeitenTotal Individual Control Technology - Insider Exposes How You and Your DNA Are Being Targeted PDFPricilla O'Brien100% (1)
- Stravinsky and The Rite of SpringDokument1 SeiteStravinsky and The Rite of SpringChokoMilkNoch keine Bewertungen
- Simon Boys Are Back in TownDokument7 SeitenSimon Boys Are Back in TownnollernNoch keine Bewertungen
- IR Remote Based Home Appliances Control.Dokument11 SeitenIR Remote Based Home Appliances Control.gauravNoch keine Bewertungen
- Eberle, B. (1996) ' ,' Austin: Prufrock Press.: Scamper: Creative Games and Activities For Imagination DevelopmentDokument1 SeiteEberle, B. (1996) ' ,' Austin: Prufrock Press.: Scamper: Creative Games and Activities For Imagination Developmentartiris_Noch keine Bewertungen
- Chet Atkins Petite WaltzDokument3 SeitenChet Atkins Petite WaltzErick Ramone100% (2)
- Mobile Communication Lesson 1Dokument20 SeitenMobile Communication Lesson 1Ushna AbrarNoch keine Bewertungen
- Music EssayDokument2 SeitenMusic Essayenzan_hart22Noch keine Bewertungen
- LIC Integrity PactDokument2 SeitenLIC Integrity PactRKNoch keine Bewertungen
- Soloing in The Oz Noy Style - GuitarPlayerDokument7 SeitenSoloing in The Oz Noy Style - GuitarPlayerμιχαλης καραγιαννης0% (1)
- Impinj Speedway Revolution User GuideDokument30 SeitenImpinj Speedway Revolution User Guidepatriciobenavid1557Noch keine Bewertungen
- MTG-3901, ACO-3901: Master Timing Generator SystemDokument8 SeitenMTG-3901, ACO-3901: Master Timing Generator SystemRtv MaastrichtNoch keine Bewertungen
- Effectiveness of Filter Bank Multicarrier Modulation For 5G Wireless CommunicationsDokument6 SeitenEffectiveness of Filter Bank Multicarrier Modulation For 5G Wireless Communicationsganga_ch1Noch keine Bewertungen
- D. E. Oscar Peterson PDFDokument8 SeitenD. E. Oscar Peterson PDFDiego OlveraNoch keine Bewertungen
- Review of The Uses of Computed Tomography For Analyzing Instruments of The Violin Family With A Focus On The FutureDokument12 SeitenReview of The Uses of Computed Tomography For Analyzing Instruments of The Violin Family With A Focus On The FutureJuan FernandezNoch keine Bewertungen
- Billboard Hot 100 50th Anniversary ChartsDokument18 SeitenBillboard Hot 100 50th Anniversary ChartsPeter EdgarNoch keine Bewertungen
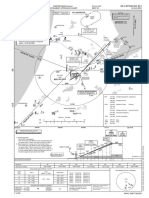
- Instrument Approach Chart ILS or LOC RWY 22 CAT HDokument1 SeiteInstrument Approach Chart ILS or LOC RWY 22 CAT Hsantiago aristizabal garciaNoch keine Bewertungen
- Tom and Jerry Script 7Dokument56 SeitenTom and Jerry Script 7anusridharNoch keine Bewertungen
- UntitledDokument36 SeitenUntitledJatinder RamgarhiaNoch keine Bewertungen
- Final Print Edition 06 03 13 Western HeraldDokument9 SeitenFinal Print Edition 06 03 13 Western Heraldapi-207389937Noch keine Bewertungen
- Oscar GNSS Receiver: Key FeaturesDokument4 SeitenOscar GNSS Receiver: Key Featuresanishaa D4SNoch keine Bewertungen
- LG Chassis MC 049a RT 29fd15Dokument31 SeitenLG Chassis MC 049a RT 29fd15Alana Clark100% (2)
- Pub644 PDFDokument1 SeitePub644 PDFIordan Dan FfnNoch keine Bewertungen
- S SSP 2013 RossiterDokument9 SeitenS SSP 2013 RossiterJoan MilenovNoch keine Bewertungen