Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Cable Selection Calculation: Johan Column Power SystemsDokument5 SeitenCable Selection Calculation: Johan Column Power SystemsVENKATESAN RNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Code of EthicsDokument41 SeitenCode of EthicsmaddumasooriyaNoch keine Bewertungen
- Electrical Installation Guide FDokument58 SeitenElectrical Installation Guide FArdıç TokluNoch keine Bewertungen
- Chapter KDokument32 SeitenChapter KSurangaGNoch keine Bewertungen
- R Rotation: Frames Shown Shown Attains UndergoesDokument3 SeitenR Rotation: Frames Shown Shown Attains UndergoesSurangaGNoch keine Bewertungen
- Engineering News: JIY Has Done It Again !Dokument12 SeitenEngineering News: JIY Has Done It Again !SurangaGNoch keine Bewertungen
- Electrical 2Dokument20 SeitenElectrical 2SurangaGNoch keine Bewertungen
- Electrical 3Dokument20 SeitenElectrical 3SurangaGNoch keine Bewertungen
- Electrical 6Dokument20 SeitenElectrical 6SurangaGNoch keine Bewertungen
- Electrical 5Dokument20 SeitenElectrical 5SurangaGNoch keine Bewertungen
- Engineering News: Sri LankaDokument12 SeitenEngineering News: Sri LankaSurangaGNoch keine Bewertungen
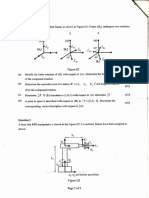
- Semester I Examination 2005 - B.Sc. Engineering Level 4 EN 407 RoboticsDokument3 SeitenSemester I Examination 2005 - B.Sc. Engineering Level 4 EN 407 RoboticsSurangaGNoch keine Bewertungen
- Sri Lankan Economy and National Policy: Saman Kelegama Sri Lanka Institute of Engineers 21 July 2014Dokument10 SeitenSri Lankan Economy and National Policy: Saman Kelegama Sri Lanka Institute of Engineers 21 July 2014SurangaGNoch keine Bewertungen
- News Letter - May-June 2014Dokument12 SeitenNews Letter - May-June 2014SurangaGNoch keine Bewertungen
- At The: Workshop On Technology Transfer and Experience Exchange Programme Between Industry and UniversitiesDokument1 SeiteAt The: Workshop On Technology Transfer and Experience Exchange Programme Between Industry and UniversitiesSurangaGNoch keine Bewertungen
- Sri Lankan Economy and National Policy: Saman Kelegama Sri Lanka Institute of Engineers 21 July 2014Dokument10 SeitenSri Lankan Economy and National Policy: Saman Kelegama Sri Lanka Institute of Engineers 21 July 2014SurangaGNoch keine Bewertungen
- IESL CPD ProspectusDokument20 SeitenIESL CPD ProspectusSurangaGNoch keine Bewertungen
- The "B" Paper IntroductionDokument8 SeitenThe "B" Paper IntroductionSurangaGNoch keine Bewertungen
- Grammar & Style: Eng Jayantha Ranatunga 07 Aug 2012 IeslDokument20 SeitenGrammar & Style: Eng Jayantha Ranatunga 07 Aug 2012 IeslSurangaGNoch keine Bewertungen
- IESL NotesDokument12 SeitenIESL NotesDhanushka BandaraNoch keine Bewertungen
- Map Projection PDFDokument397 SeitenMap Projection PDFDellaNoch keine Bewertungen
- FOR ELECTION AS FELLOW, MEMBER OR COMPANIONDokument5 SeitenFOR ELECTION AS FELLOW, MEMBER OR COMPANIONSurangaGNoch keine Bewertungen
- Specification For Supply & Installation of Window Type Air Conditioning Units & AccessoriesDokument9 SeitenSpecification For Supply & Installation of Window Type Air Conditioning Units & AccessoriesChamin SubhawickramaNoch keine Bewertungen
- THE Institution OF Engineers, SRI Lanka: Please Fill in With Block LettersDokument1 SeiteTHE Institution OF Engineers, SRI Lanka: Please Fill in With Block LettersSurangaGNoch keine Bewertungen
- Product Data Sheet: iPRD40 Modular Surge Arrester - 3P + N - 350VDokument2 SeitenProduct Data Sheet: iPRD40 Modular Surge Arrester - 3P + N - 350VSurangaGNoch keine Bewertungen
- Abdelwahab2017 OkDokument7 SeitenAbdelwahab2017 OkSurangaGNoch keine Bewertungen
- AbdgDokument2 SeitenAbdgSurangaGNoch keine Bewertungen
- Product Data Sheet: iPRD40 Modular Surge Arrester - 3P + N - 350VDokument2 SeitenProduct Data Sheet: iPRD40 Modular Surge Arrester - 3P + N - 350VSurangaGNoch keine Bewertungen
- Altayeb2018 OkDokument4 SeitenAltayeb2018 OkSurangaGNoch keine Bewertungen
- Optimize Solar Power with Temperature TrackingDokument5 SeitenOptimize Solar Power with Temperature TrackingSurangaGNoch keine Bewertungen